- @CHHYQMGDCDZu
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
该代码实现了一个基于SVPWM(空间矢量脉宽调制)的VVVF控制系统,支持多种V/F曲线、自动转矩提升、转差补偿、振荡抑制等功能。系统采用模块化设计,包含电流变换、电压频率控制、PWM生成等子模块。该代码实现了一个功能完整、结构清晰的异步电机VVVF控制系统,具备良好的可配置性与可扩展性。通过模块化设计和详细的注释,便于理解、调试和二次开发。
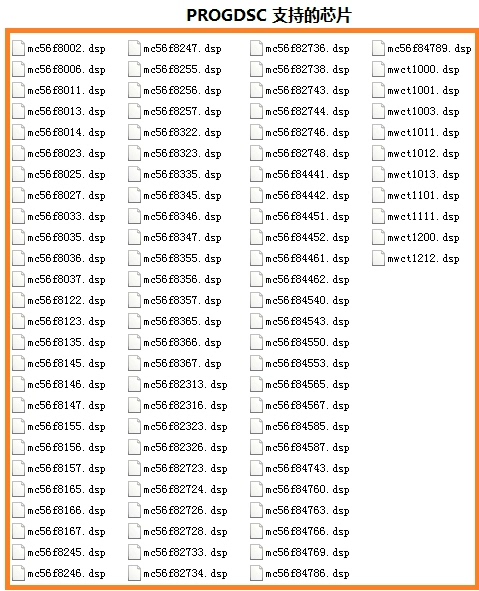
有次遇到冷门错误码402,最后发现是仿真器固件没升级——这软件居然不会自动检测固件版本,版本兼容性这块做得真糙。PROGDSC作为官方指定的烧录工具,虽然界面长得像Windows XP时代的产物,实际操作起来倒是比想象中顺手。遇到连不上的情况,优先查电源波纹是不是超标,这系列芯片对供电质量敏感得像个公主。飞思卡尔仿真器/编程器/烧录器软件PROGDSC,读写MC56F系列芯片,支持的芯片列表见第三
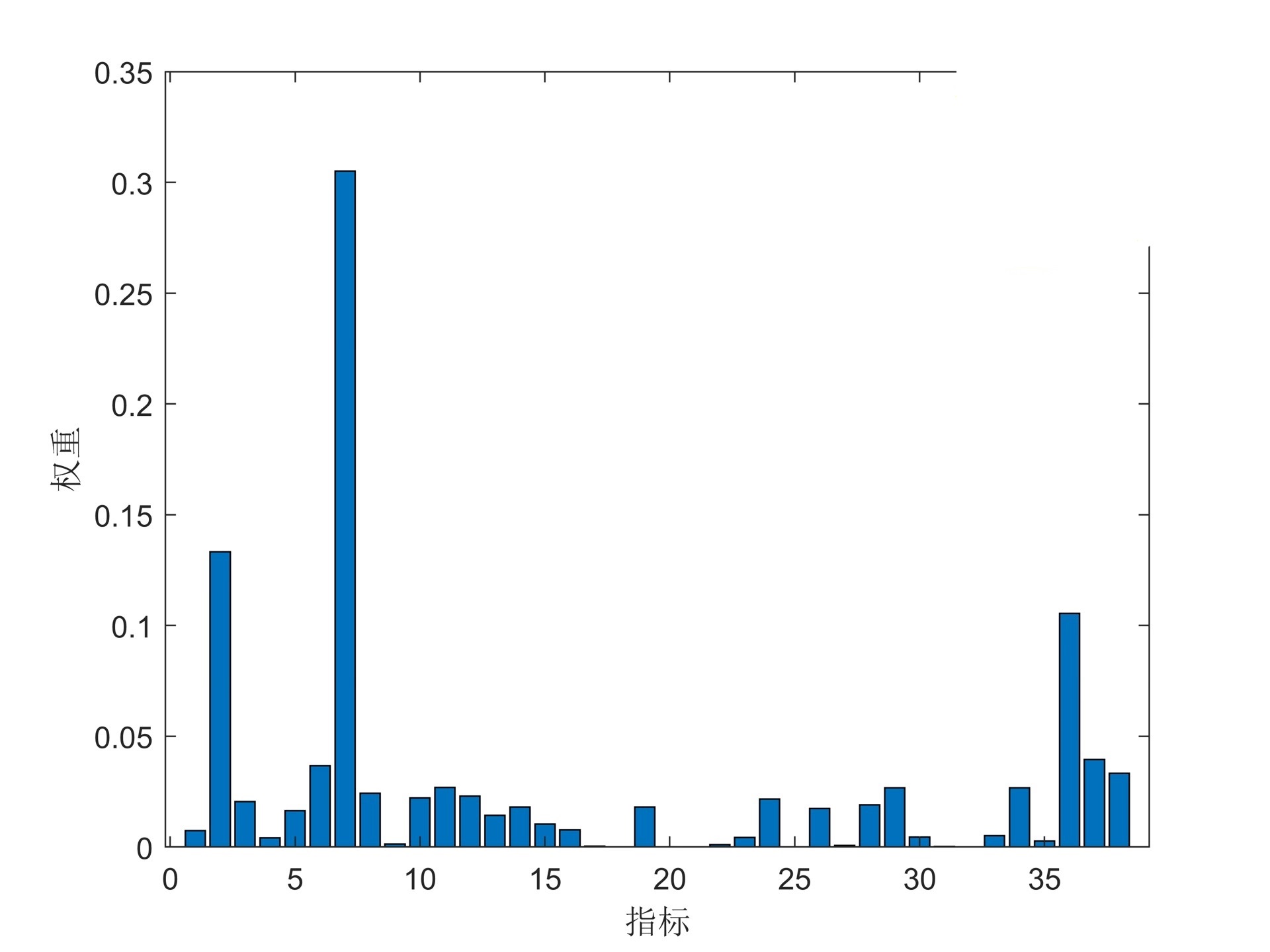
critic法计算指标权重根据指标数据(每行是一个样本,每列是不同变量)计算各个指标的权重值并画图展示MATLAB代码,备注清晰,易于使用在数据分析的世界里,确定不同指标的权重是一项关键任务。今天咱们来聊聊用Critic法计算指标权重,并且用MATLAB实现这个过程,最后还把结果画成图展示出来。
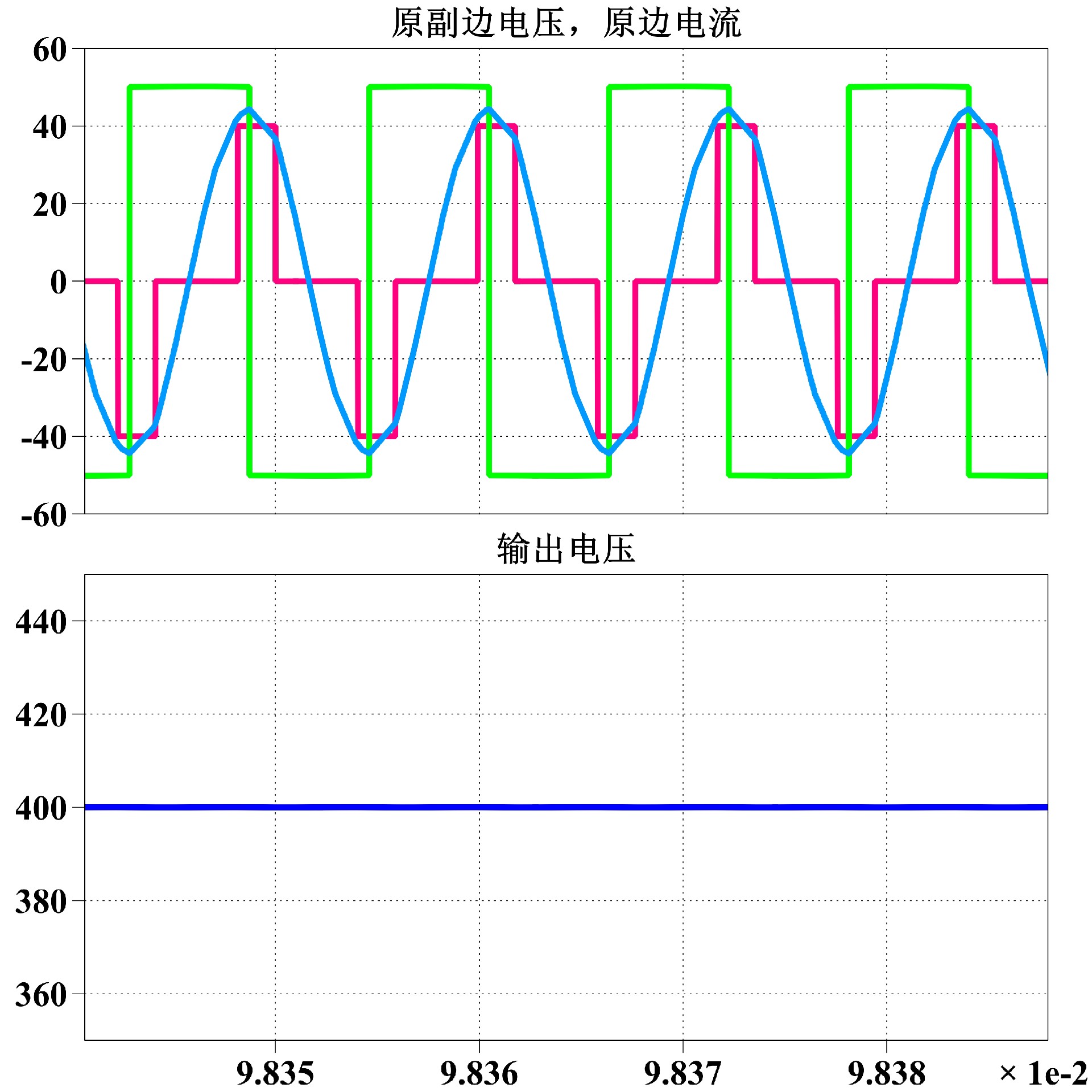
深夜两点盯着示波器屏幕,突然发现谐振电流的波形开始优雅地跳起华尔兹——这是我在调试S-S型无线电能传输系统时最兴奋的瞬间。这个采用移相控制的拓扑结构,就像给电磁场装上了精准的舞步控制器,让能量在空气中完成400V的完美跳跃。每当400V的直流输出稳稳点亮2米外的灯泡矩阵,空气里似乎还回荡着当年调试时此起彼伏的"哇哦"声——或许这就是电力电子工程师的浪漫吧。主电路参数设计先从这支"电磁探戈"的舞池尺
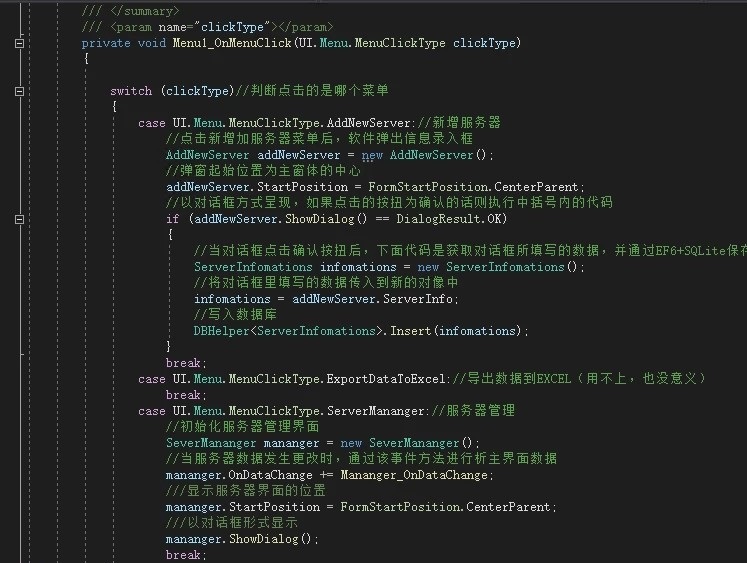
需要源码的兄弟可以去Github搜"OPCUA-EF6-SQLite-Demo"(这里假装有个仓库)。用LINQPad跑测试的时候发现个有趣现象:SQLite在频繁写入时性能明显优于SQL Server Express,果然是嵌入式场景的神器。这里有个坑要注意:OPC UA节点ID的命名空间索引别手抖写错,否则会连不上节点。项目里还实现了重连机制——当连接意外断开时,会自动尝试重建会话。代码有完整
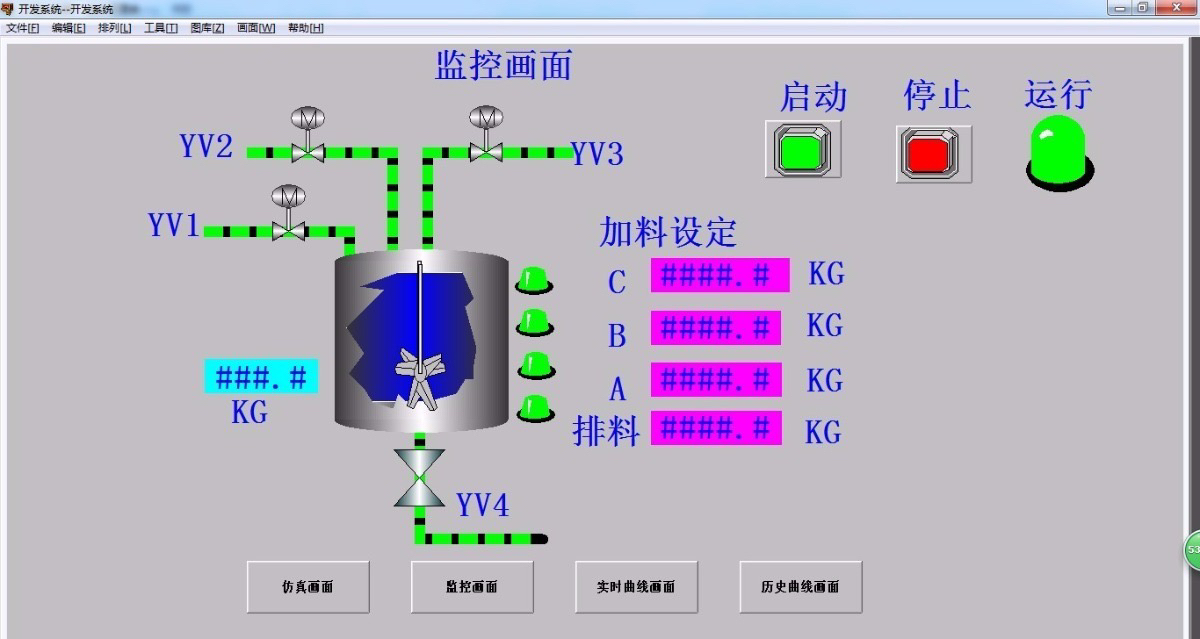
No.977 S7-200 PLC和组态王3种混合物料搅拌混合控制带解释的梯形图程序,接线图原理图图纸,io分配,组态画面在自动化生产领域,多种物料的精确搅拌混合控制是常见需求。今天咱们就来聊聊使用S7 - 200 PLC和组态王实现3种混合物料搅拌混合控制的那些事儿,这里面包括带解释的梯形图程序、接线图原理图、IO分配以及组态画面。
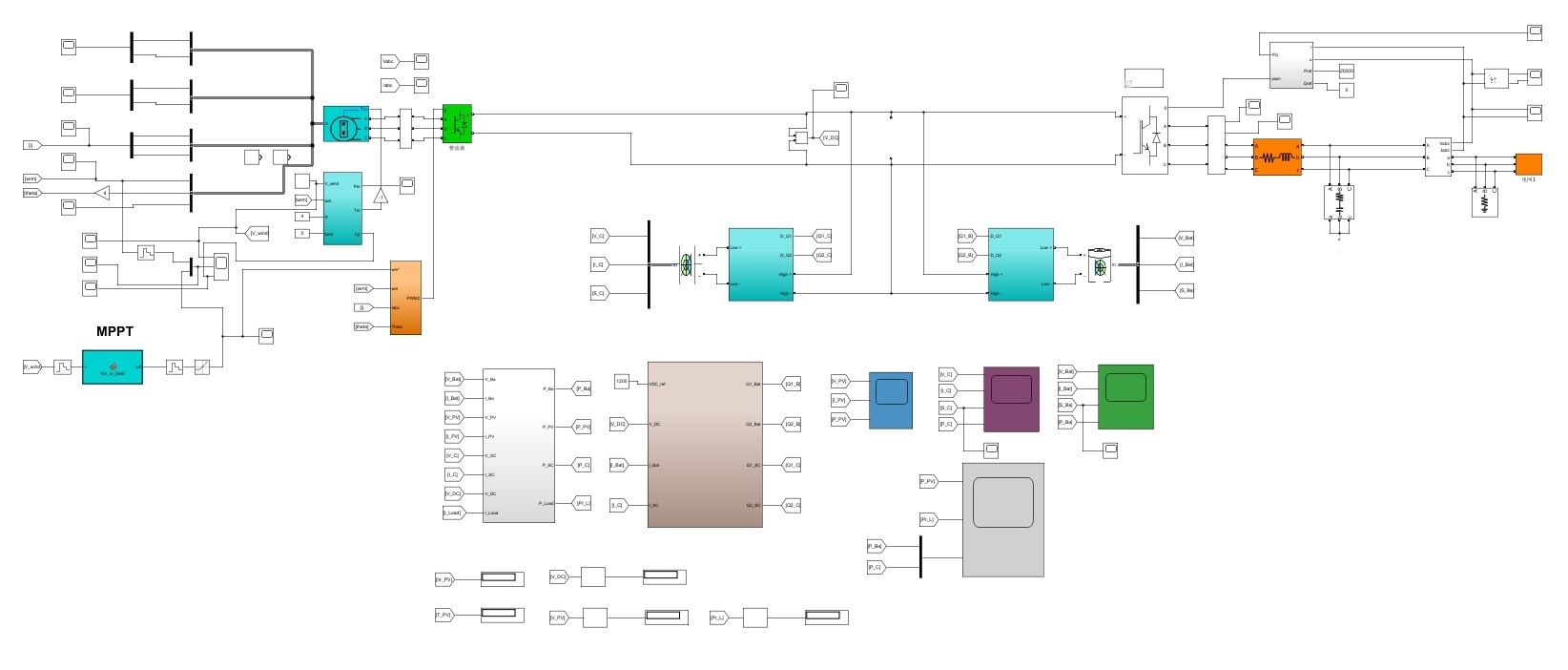
而当它与混合储能系统和PQ逆变并网技术结合时,整个系统的稳定性和灵活性将得到显著提升。风机的输出功率与风速密切相关,因此在风资源不稳定的情况下,如何保持电网的稳定供电就成了一个挑战。通过将永磁直驱风机、混合储能系统和PQ逆变并网技术结合起来,我们可以构建一个高效、稳定的风力发电系统。当然,这只是一个简化的模型,实际系统中还需要考虑更多的因素,如电网的稳定性、储能系统的寿命管理等。PQ控制是一种常见
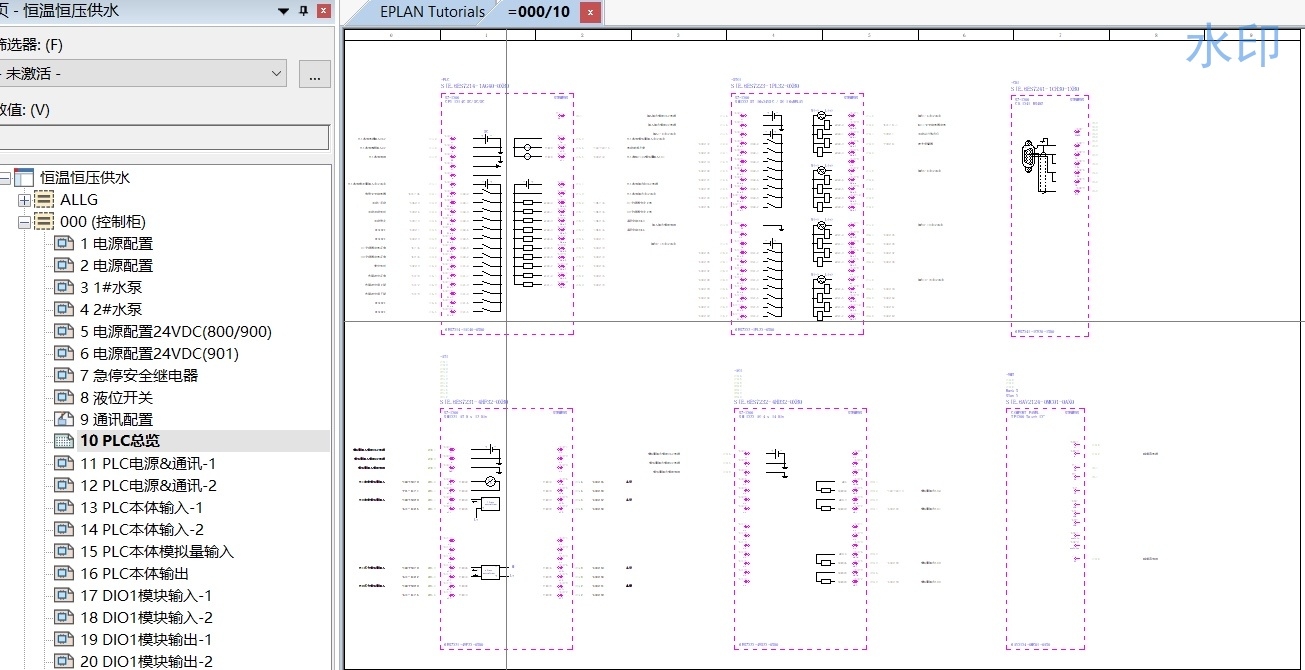
这个系统主要涉及两方面的控制,一是通过霍尼韦尔电动比例阀进行PID控制水温,二是利用两台西门子v20变频器模拟量PID控制水压。此外,还会提供程序和Eplan源档图纸,程序版本要求TIA V14及以上。通过以上的程序和组态,我们实现了一个基于西门子S7 - 1200的PID恒温恒压供冷却水系统。这个系统不仅能保证水温、水压的稳定控制,还提供了友好的人机交互界面,方便操作人员进行监控和管理。希望这个
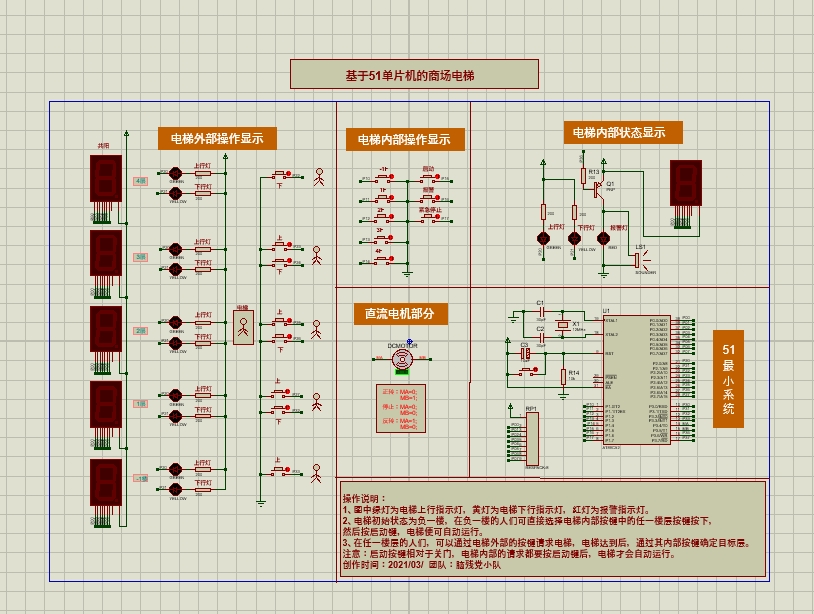
1:外部五层楼各楼层分别有上下按键,按下后步进电机控制电梯去该楼层,每层楼都有一位数码管显示电梯当前楼层;1:外部五层楼各楼层分别有上下按键,按下后步进电机控制电梯去该楼层,每层楼都有一位数码管显示电梯当前楼层;4:电梯内部可按键紧急制动,此时电梯停止运行,电梯内部其他按键以及外部五层楼的上下按键将无法控制电梯。4:电梯内部可按键紧急制动,此时电梯停止运行,电梯内部其他按键以及外部五层楼的上下按键
基于stc89c51单片机的温控风扇(程序代码+原理图)自动模式下,通过读取ds18b20的温度,并且通过红外人体感应,判断是否有人,如果有人就智能自动设置风扇的pwm输出,达到智能调温的作用,如果感应到没人,自动关闭风扇,然后将当前温度显示在四位数码管上面最近玩了个挺有意思的项目——基于stc89c51单片机的温控风扇,今天就来和大家分享分享。这个小风扇可不一般,它能自动调节温度,还能根据是否有