
写文章




- @BigDavid123
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
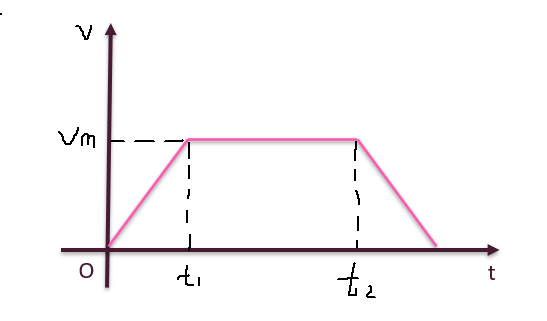
【自动驾驶 && 机器人】速度规划 |梯形/S型速度曲线
本文简要介绍了速度规划常用的T型和S型速度曲线
机器人基础&&深度学习基础
从二连杆机构理解机器人运动学

【备战测开】—— 编程语言Python(一)
本文详解了Python的基本语法


VLN视觉语言导航基础
视觉语言导航基础入门

VLN视觉语言导航基础
视觉语言导航基础入门