- @AADNsLUt
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
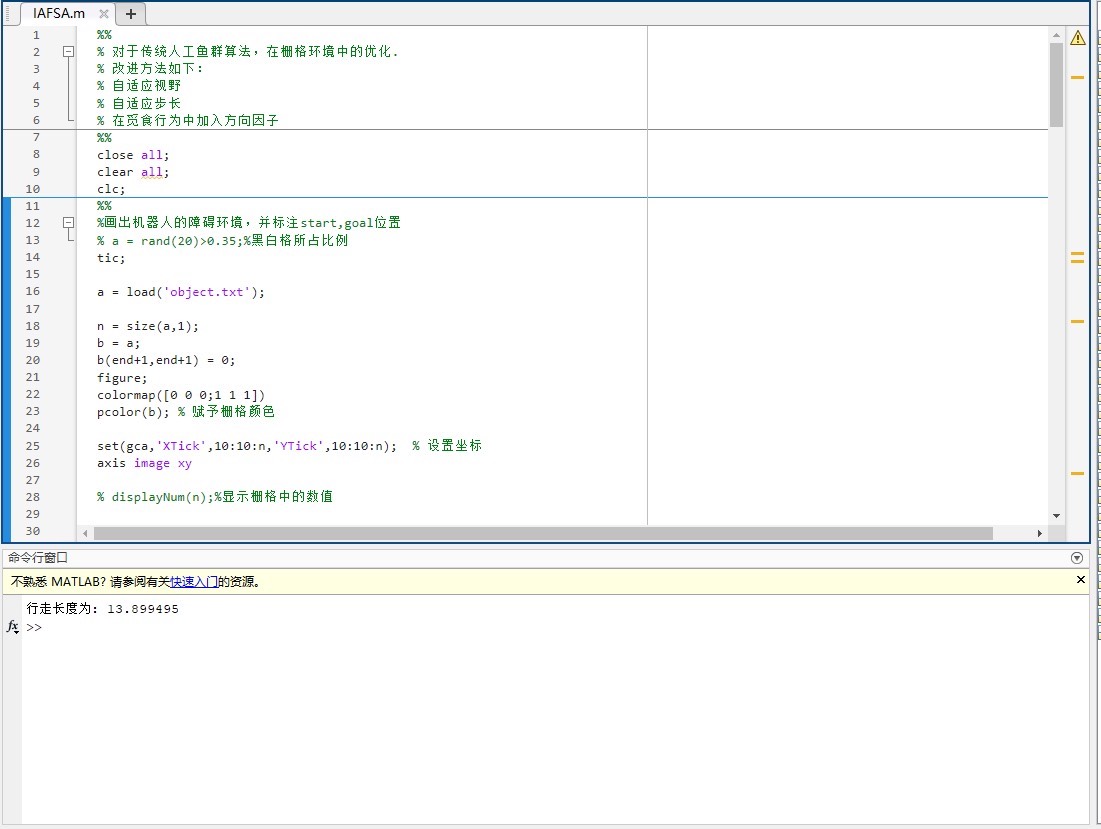
最近在折腾各种无人设备的路径规划算法,偶然翻到篇用改进人工鱼群法搞路径规划的论文,手痒就用MATLAB复现了一把。传统人工鱼群算法在复杂地图里容易卡死,这次改进了视野范围和移动步长的自适应机制,还加了点启发式选择的私货,实测效果有点东西。代码里有个小彩蛋:在可视化部分加了鱼群轨迹的渐变色显示,颜色越暖表示该区域被探索的次数越多。论文复现基于改进人工鱼群法的机器人,无人机,无人车,无人船的路径规划算
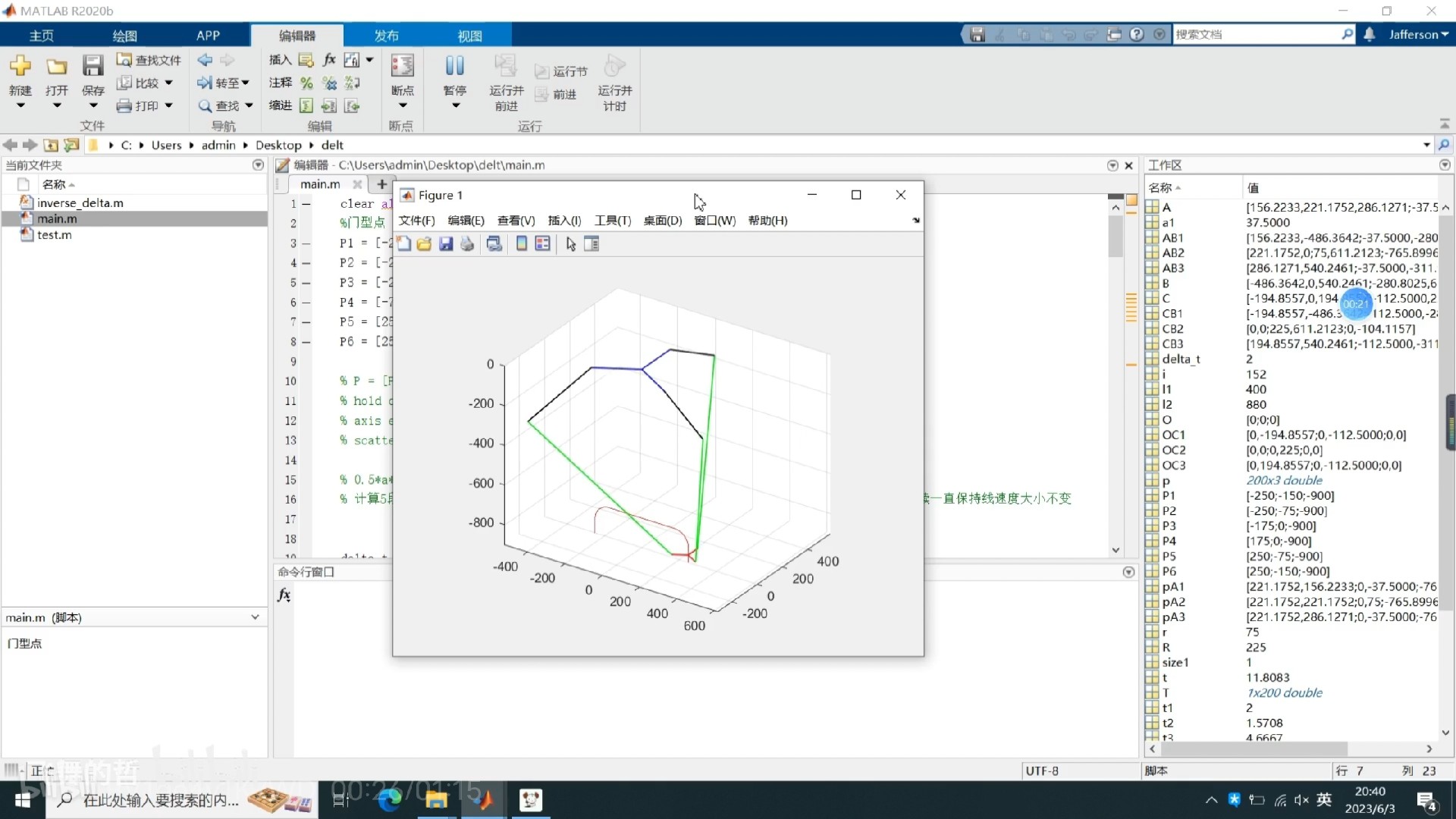
今天咱们来聊聊Delta并联机器人的轨迹规划和工作空间求解,顺便撸点代码,看看怎么搞正逆解。它的结构简单,三个臂膀,末端有个平台,动起来特别灵活。轨迹规划的核心就是插值,就是在路径上取一系列点,然后让机器人依次到达这些点。这里有个关键点,就是正逆解。不过,这只是个简化模型,实际应用中还要考虑更多因素,比如臂膀的偏移、关节的限制等等。不过,这个代码也是个简化模型,实际应用中还要考虑更多细节,比如关节
仿真模型里有个骚操作:用Simulink的RTW直接把算法生成C代码,再和手写代码做混合编译。不过要当心自动生成代码里的memcpy操作——搞不好就堆栈溢出,都是血泪教训。注意SQRT3这个宏定义,老司机都懂这是√3约等于1.732,但大厂代码里绝对用精确值——电机控制差1%都能翻车。这里有个坑:ADC采样得做均值滤波,毕竟工频干扰会捣乱。大厂代码里常见这种批量采样取平均的操作,比卡尔曼滤波实在—
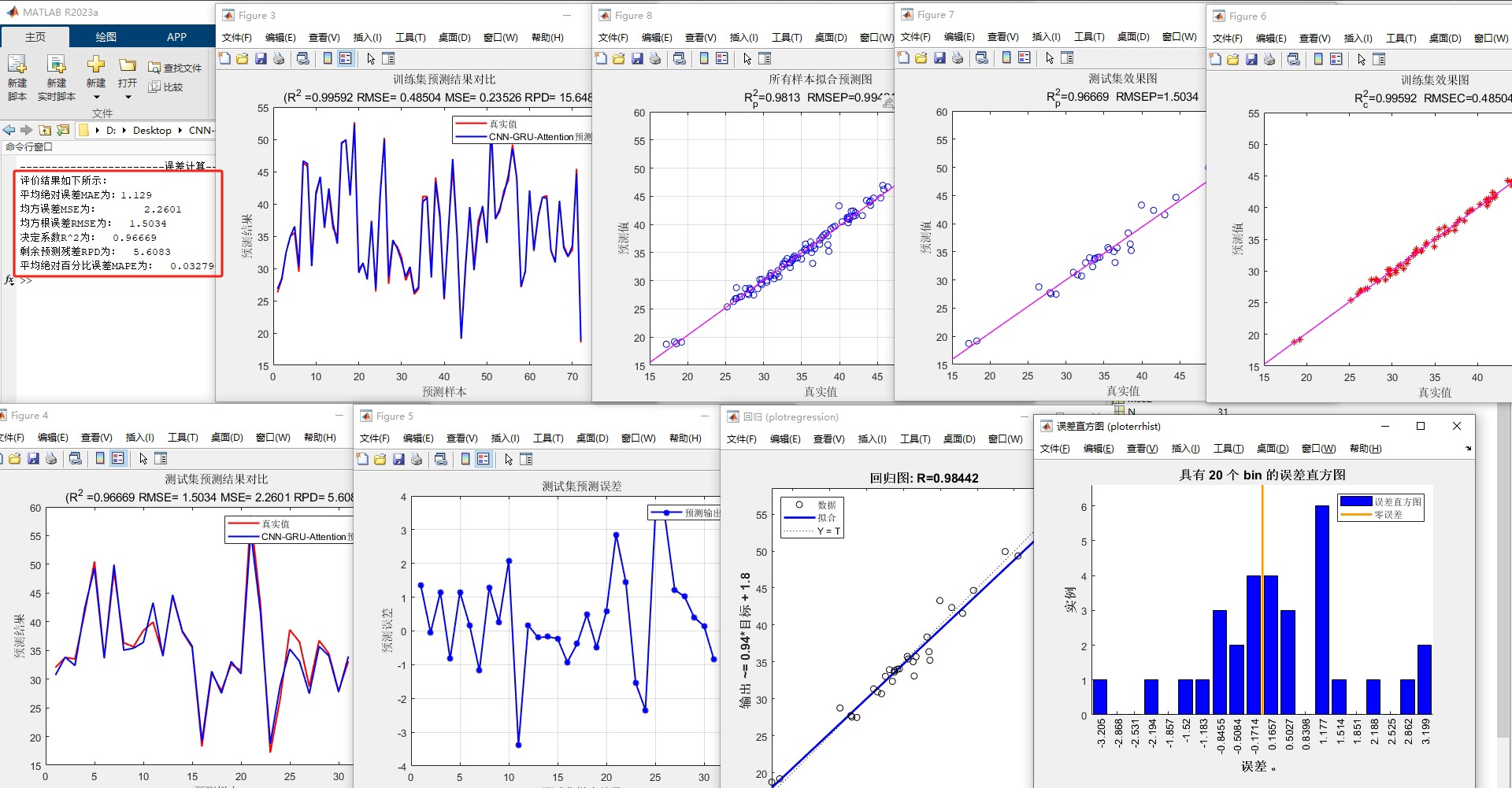
曾经有个案例,工程师死活调不好模型,最后发现是传感器数据存在周期性故障,这锅模型可不背。替换自己的数据时注意三点:数据文件格式保持excel的xlsx格式,输入特征列放在前几列,最后一列是输出值。咱们今天直接上硬货,用MATLAB整一个CNN-GRU-Attention混合模型,手把手教你怎么用这个三合一神器做数据回归预测。如果看到预测曲线比真实值平滑,可能是模型过滤掉了噪声,也可能是欠拟合了,这
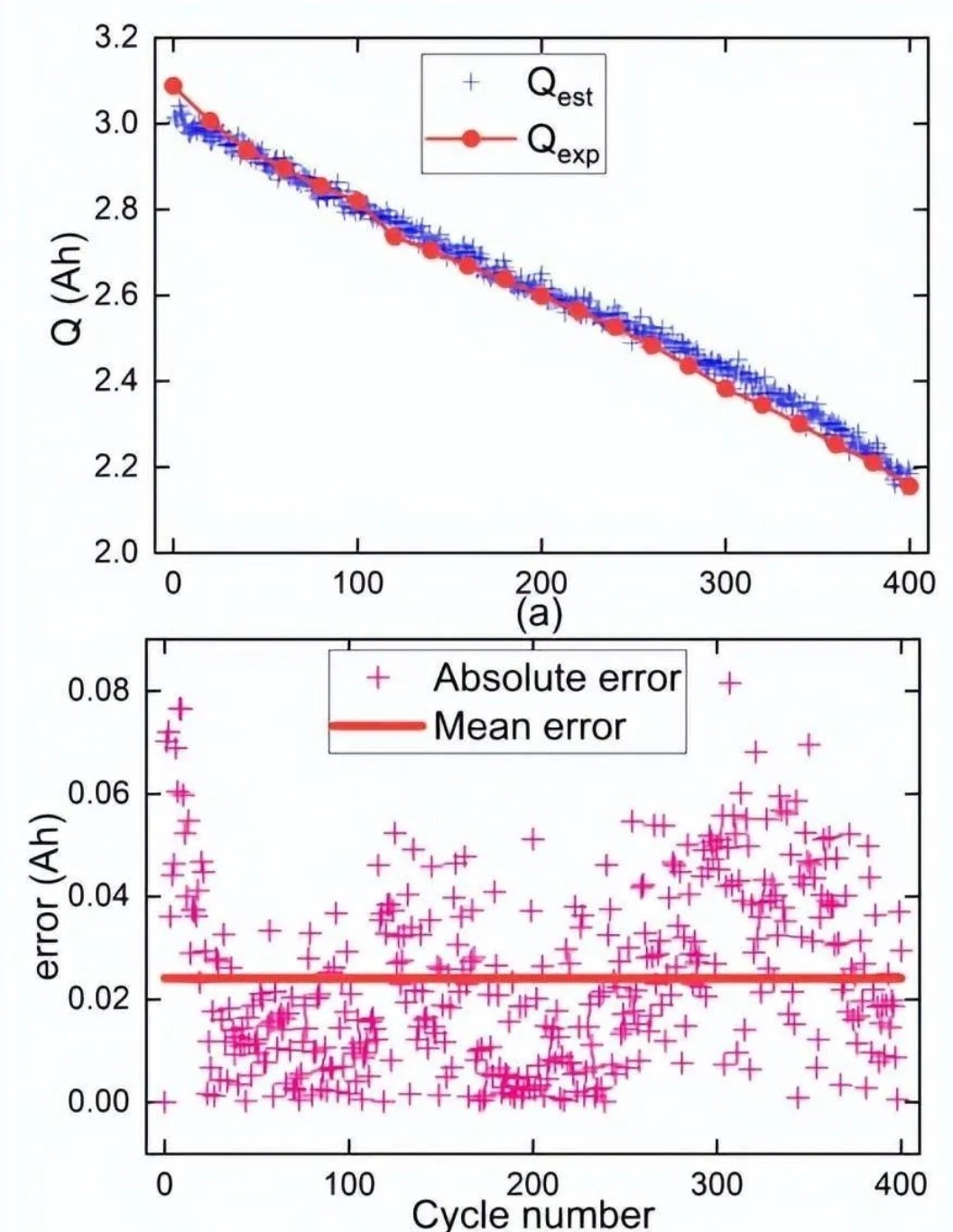
锂离子电池SOH估计,根据循环中的规律,提取每个循环中的的电压和电流各10个健康因子,设计的基础模型结构为输入层+LSTM层+全连接层+输出层。在锂离子电池的研究领域,电池健康状态(State of Health,SOH)的准确估计至关重要。今天就来聊聊基于循环中的规律,利用特定模型进行锂离子电池SOH估计的事儿。
这款平台可以说是硬件领域的一颗新星。它电气、接口和结构都严格符合 PXIe/cPCIe 标准,就像一个守规矩的好学生,给人一种靠谱的感觉。它设有 1 个 System 插槽、7 个外设插槽,能很好地满足用户在更高带宽方面多样的测控应用需求。机箱采用模块化设计,就像搭积木一样,可维护性那叫一个高。机箱背板更是厉害,提供了高速总线交换网络,系统带宽最高能达到 14GB/s,单槽独立带宽也能飙到 4GB

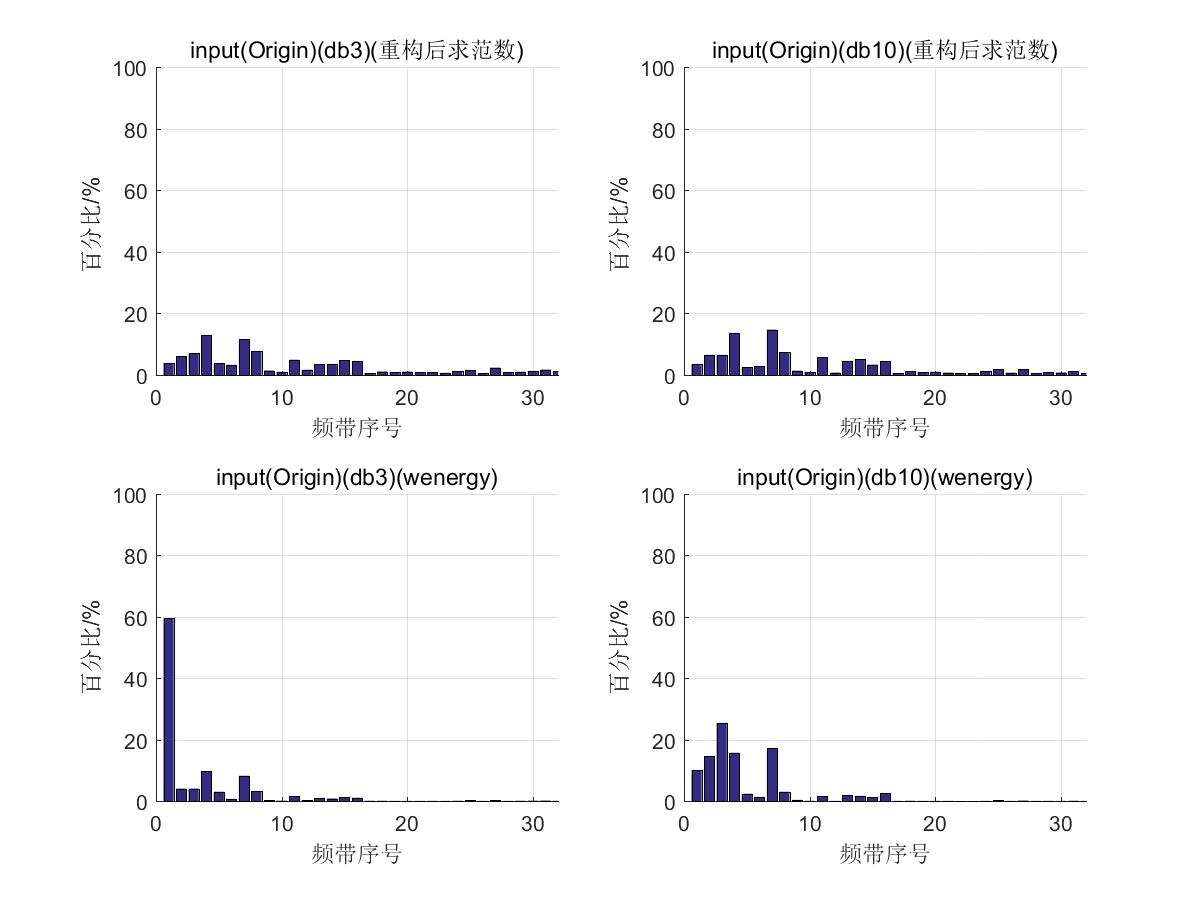
m文件资料包本质上是一系列MATLAB函数和脚本的集合,这些文件以.m为扩展名。它们就像是一个个功能模块,你可以按照自己的需求调用,从而实现复杂的信号处理任务。在计算重建后信号各频带占比的场景下,m文件资料包可以包含读取信号数据、进行频谱分析、划分频带以及计算占比等功能的代码。
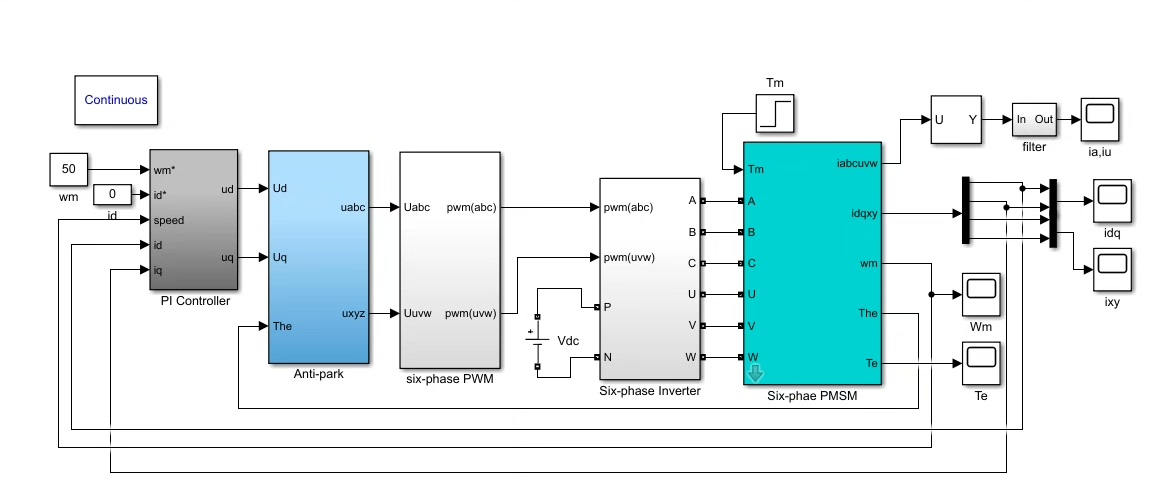
六相永磁同步电机控制系统的Simulink模型正在跑着仿真,屏幕上的转矩波形突然出现高频毛刺。模型跑通那天下班,发现仿真步长设的是1e-5秒——难怪吃了16G内存。所以说啊,搞电机控制,一半时间在调算法,另一半在跟仿真软件斗智斗勇。有次忘记限制矢量作用时间,IGBT开关频率直冲20kHz,吓得我赶紧加了个rate limiter。后来改成基于矢量作用时间的动态补偿,世界终于清净了。坐标变换是重头戏
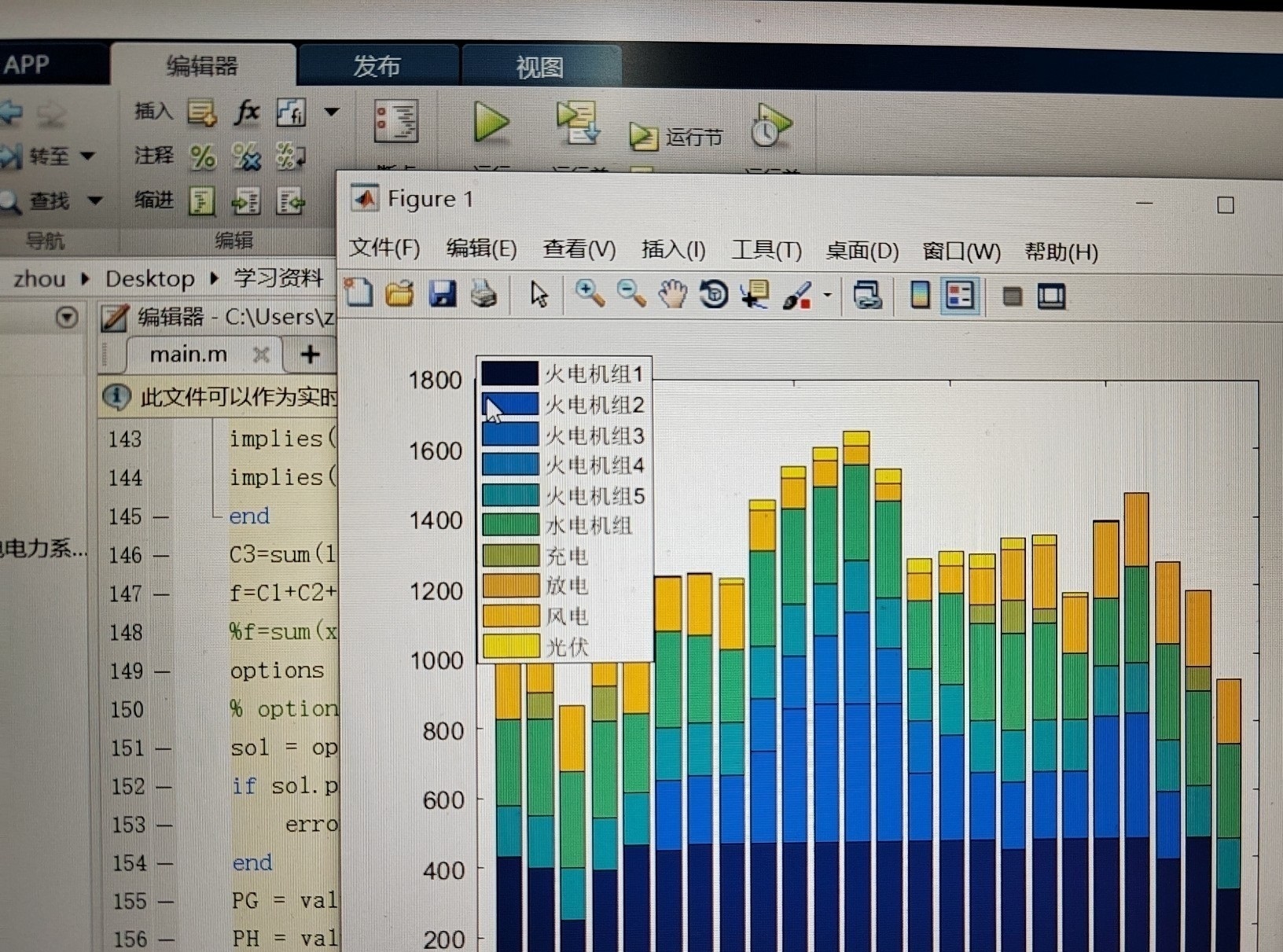
内容:考虑源荷两侧不确定性的含风电的低碳调度,引入模糊机会约束,程序包括储能、风光、火电机组及水电机组,解决了目标函数含有分类特征的约束问题、非线性约束/目标的线性转化问题,且考虑了机组的启停时间约束,目标函数考虑运行成本、弃风弃光和碳成本,有参考文献。内容:考虑源荷两侧不确定性的含风电的低碳调度,引入模糊机会约束,程序包括储能、风光、火电机组及水电机组,解决了目标函数含有分类特征的约束问题、非线
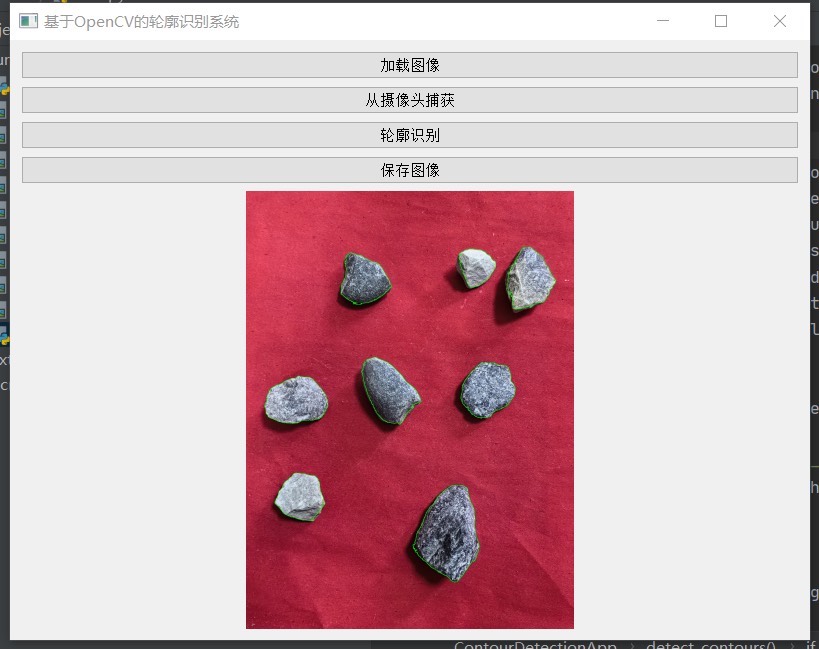
基于opencv的轮廓识别系统python效果如图在计算机视觉领域,轮廓识别是一项基础且重要的任务,OpenCV作为强大的计算机视觉库,提供了丰富的工具来实现这一功能。今天就来唠唠基于OpenCV的Python轮廓识别系统。