- @2509_94268171
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
另外,消除谐波次数越高,需要的开关角越多,计算时间指数级增长。一般消除5、7、11次谐波用5个开关角足够,再往上建议换其他调制方式。玩过逆变器的老铁都知道,特定谐波消除这招能精准干掉指定次数的谐波,尤其适合对电能质量要求高的场合。实测发现用circshift做相位偏移时,角度数量最好是3的倍数,否则会出现边缘跳变。跑完仿真看波形,5次、7次谐波基本被干到1%以下。这段代码有几个骚操作:用符号运算自
用户管理:可以对用户信息进行添加、删除、修改和查看。这对于系统的权限控制和用户维护非常重要。// 添加用户示例代码$data = ['role' => '普通用户'// 构建要插入的数据数组,然后使用 insert 方法将数据插入到 user 表中仓库管理:能对仓库信息进行同样的操作。想象一下,一个企业有多个仓库,这个功能就可以方便地管理各个仓库的信息。货品管理:对货品信息进行增删改查。比如一个电
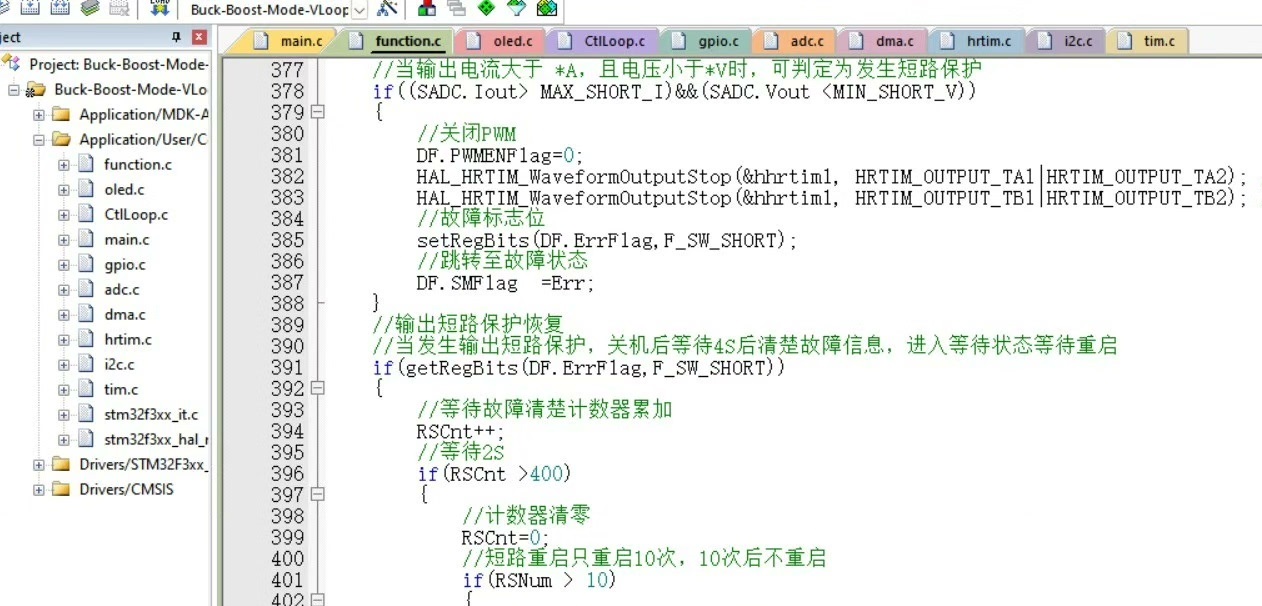
(2)程序源码:三套程序(Buck模式、Boost模式、Buck-Boost模式),具有软起动、完整的短路保护,过流保护,输出过压保护,输入过压欠压等保护功能。(2)程序源码:三套程序(Buck模式、Boost模式、Buck-Boost模式),具有软起动、完整的短路保护,过流保护,输出过压保护,输入过压欠压等保护功能。模式切换逻辑是项目的灵魂。功能:采用STM32F334C8T6芯片,能够根据输入
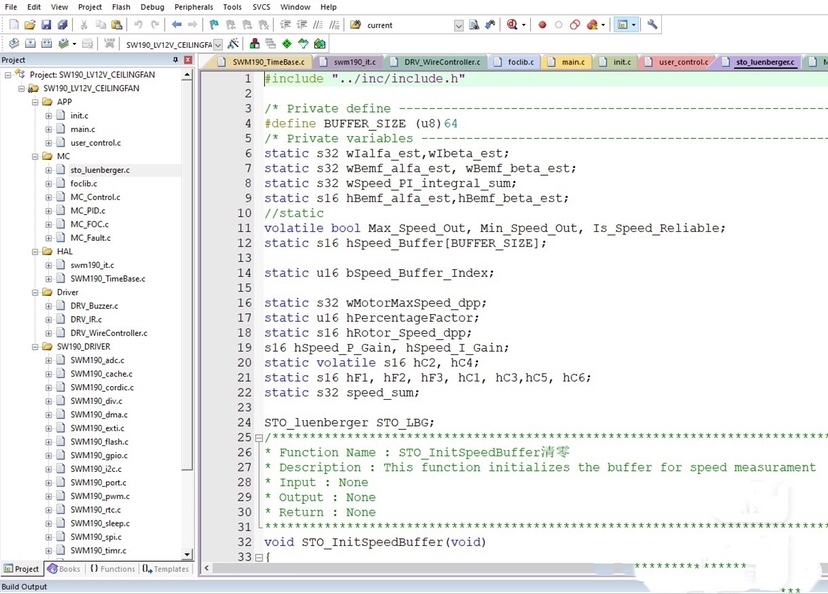
说点实际数据:用MM32芯片带800W离心风机,0转速到满速2800rpm只要0.8秒,顺风启动成功率100%,满载效率92.7%。今天给大伙儿扒一套真正能打的量产级无感FOC风机代码,实测支持从华大到GD32全系芯片,连原理图都给你打包好了。全开源代码,代码基于国产MCU芯片,大厂成熟风机量产程序,龙博格电机观测器观测角度,SVPWM,支持顺逆风启动,五段式与七段式调制等源码。包含原理图和程序源
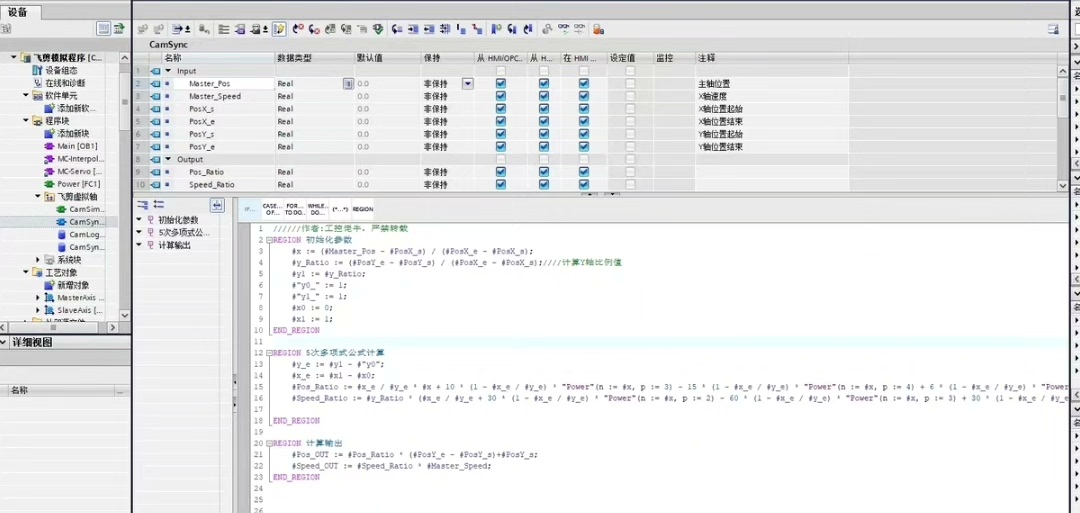
要想用凸轮功能,得用1500T,但1500T的价格实在是有点高,不太适合预算有限的项目。于是,我决定另辟蹊径,通过研究飞剪算法,用5次多项式来计算刀轴的运动曲线,最终实现了用1500PLC也能完成飞剪功能。飞剪的核心就是让刀轴的运动与材料的速度同步,确保在切割时不会出现偏差。必须用1500T才可以实现,由于1500T价格高,该程序通过研究飞剪算法,采用5次多项式计算刀轴的运动曲线,这里的关键是要确
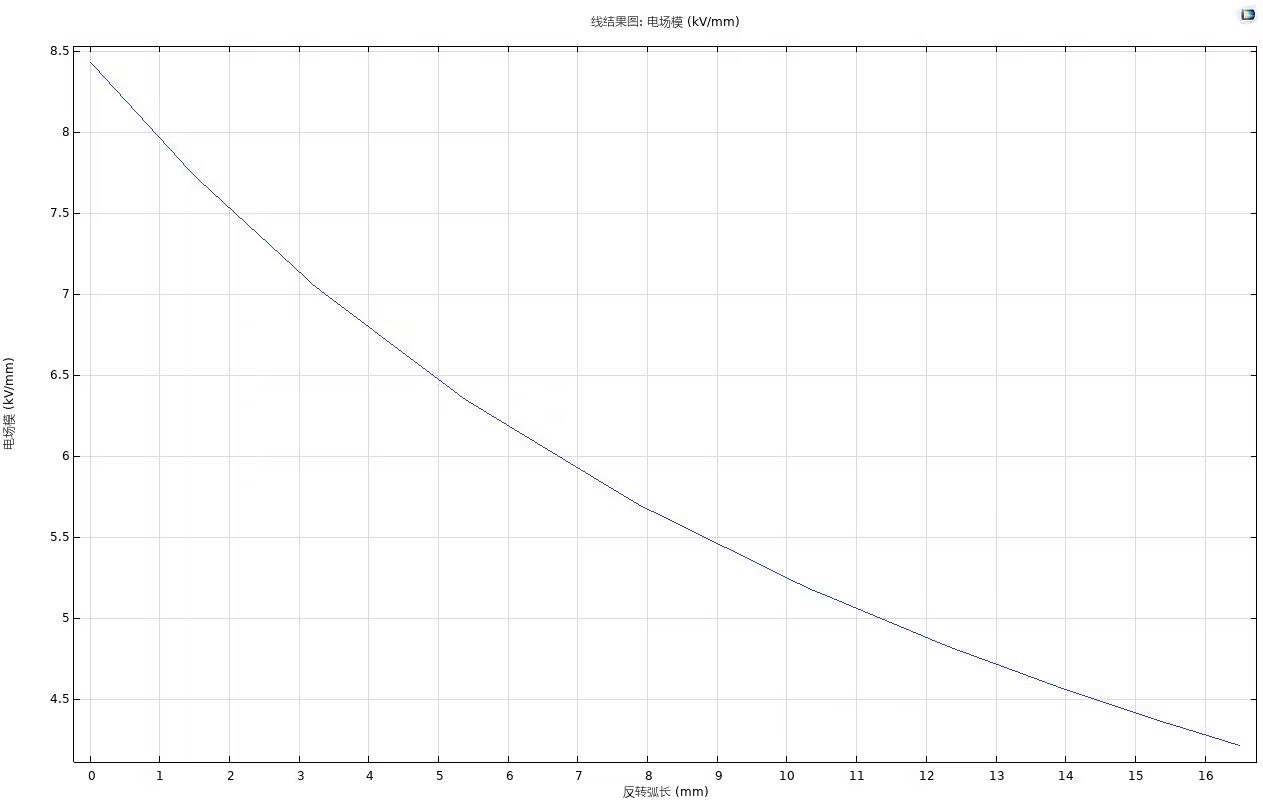
今天咱们直接上干货,用COMSOL搞个真刀真枪的电场计算模型。比如XLPE绝缘材料的介电常数取2.3,电导率设置成1e-16 S/m这种量级,参数设错后面全白搭。电场计算的核心方程是静电场模块,但别忘记勾选空间电荷密度选项——高压下电荷迁移会影响场强分布。电场仿真这事,配置吃内存就像喝水,32GB起步是基本礼仪。这里有个取巧的办法:用内置的电缆模型库,改改尺寸就能生成标准结构。comsol高压电力
SMOTE算法过采样解决类不平衡问题,用于机器学习的分类问题SMOTE是一种综合采样人工合成数据算法,用于解决数据类别不平衡问题(Imbalanced class problem),以Over-sampling少数类和Under-sampling多数类结合的方式来合成数据。案例数据中前9列为特征变量,最后一列为类别标签按相应格式准备自己数据即可,运行后输出新数据到excelMatlab代码,mai
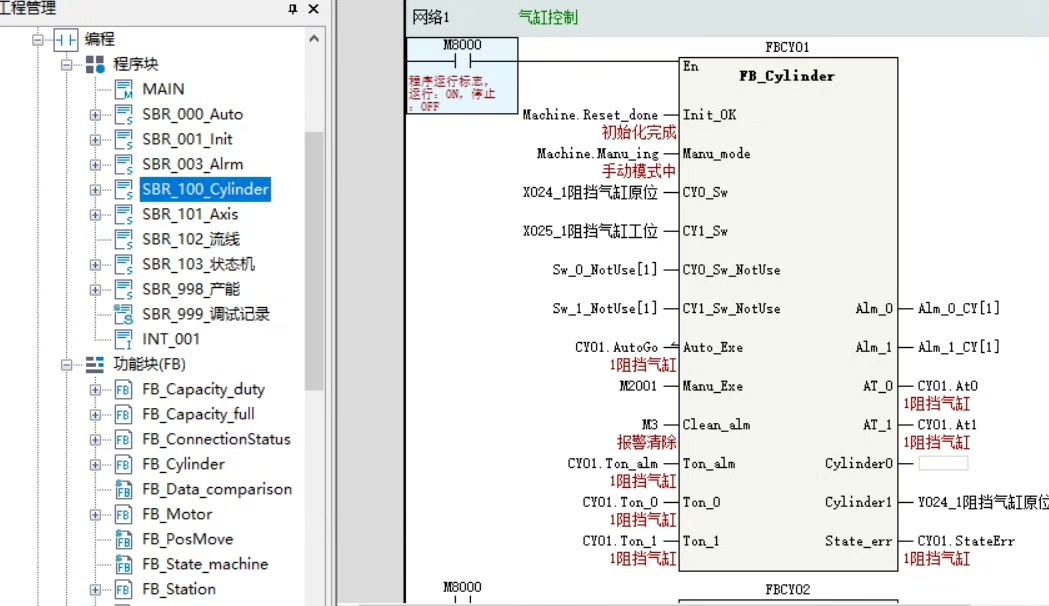
这个框架最大的亮点就是全开源且无加密,意味着我们可以随心所欲地查看、修改和复用代码。它基于汇川H5U和EASY系列PLC进行开发,封装了多个基础功能块以及外围设备功能块。这些功能块的封装,就像是搭建积木一样,大大降低了开发的难度,让初学者也能快速上手,同时也为有经验的开发者提高了开发效率。
在HalfCheetah环境中测试时,DDPG的前1000步表现惊艳,TD3在中后期稳如老狗,SAC则像突然顿悟的学霸。看着三种算法在同样的环境中走出不同的人生轨迹,突然明白强化学习和养孩子其实差不多——给足探索空间,适当设置约束,剩下的就交给时间和随机种子吧。当我在凌晨三点盯着屏幕上抽搐的机械臂时,突然意识到深度强化学习算法之间的差异,可能比咖啡和红牛的区别还要重要。在机械臂抓取任务中,我亲眼看
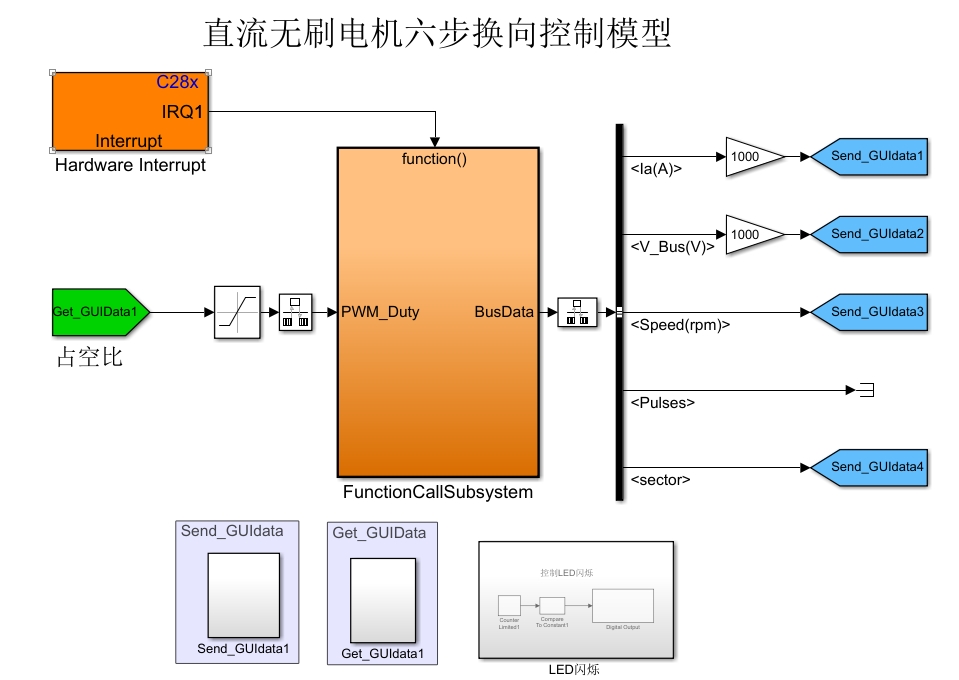
实战中发现,自动生成的代码在CCS工程里会带着"ert_"前缀的注释块,这些其实是代码生成器的标记。如果出现锯齿状抖动,八成是霍尔信号消抖没做好,这时候得回Simulink模型里给霍尔输入加个数字滤波器模块,重新生成代码再战。比如想调整换向死区时间,直接在Simulink里改个数值,刷刷几下就能生成新代码下载测试,比传统开发方式至少省三杯咖啡的时间。主控芯片dsp tms320f28335,基于M