- @2508_94230129
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
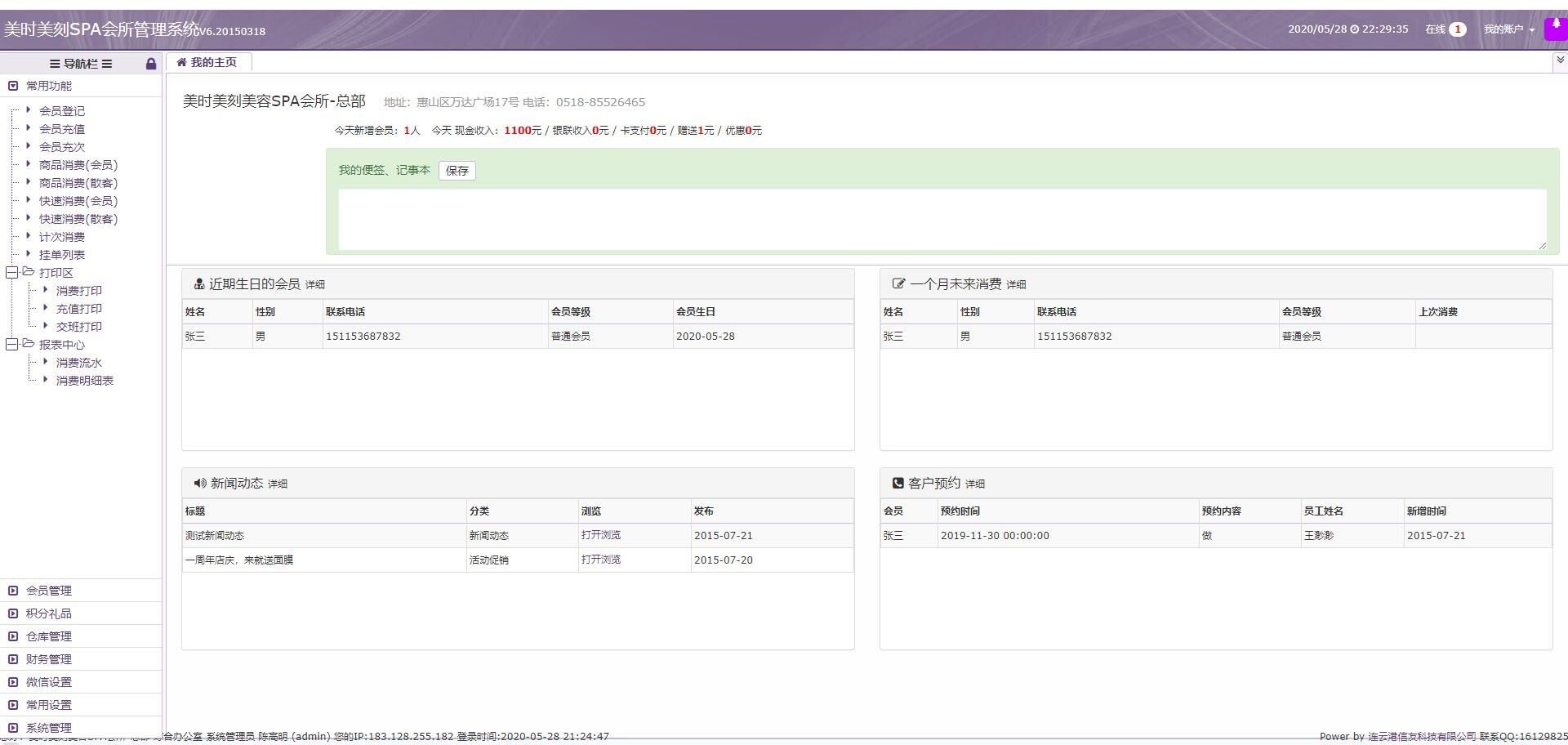
会员管理系统源码 php语言开发可用于美容店,理发店,服装店,美甲店,奢侈品店等等功能介绍:1.常用功能会员登记,会员充值,会员充次,商品消费(会员),商品消费(散客),快速消费(会员),快速消费(散客),计次消费,挂单列表打印区消费打印,充值打印,交班打印报表中心消费流水,消费明细表2.会员管理会员登记,会员列表,会员充值,更改密码,重置密码,挂失锁定,会员换卡,账户退款售后服务近期生日的会员,
这玩意儿能直接怼西门子PLC,支持OPC和KepServer通信,比传统方案灵活十倍。在系统设置页里配置报警条件时,直接写C#表达式就行,不用重新编译整个项目。这招是从KepServer的脚本引擎偷师的,但用起来更符合C#码农的习惯。当PLC触发报警时,通过DataTrigger让页签标题疯狂闪烁,比传统HMI的静态报警直观得多。继承自WPF原生RangeBase控件,模板重写时加了惯性动画,操作
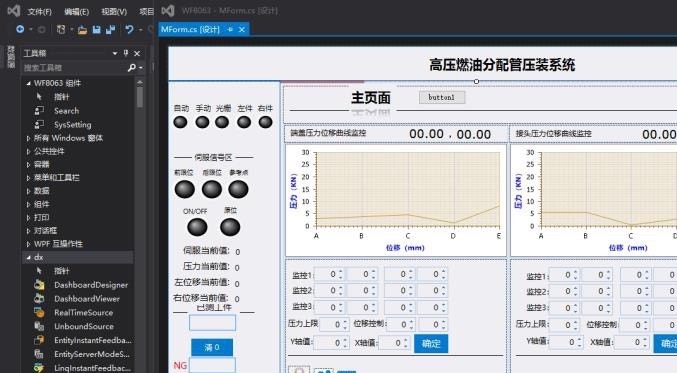
在WinForms里SplitContainer是个好东西,左边导航栏,右边工作区,下面状态栏,这结构用户看着舒服。最后给主界面加点现代化元素,用DevExpress的DockPanelManager做布局管理,比原生控件好看多了。串口通讯注意线程安全,收到数据时记得用Control.Invoke更新UI。曲线控件推荐用OxyPlot,比自带的Chart控件灵活。曲线显示美观,纵横坐标可以放缩,游
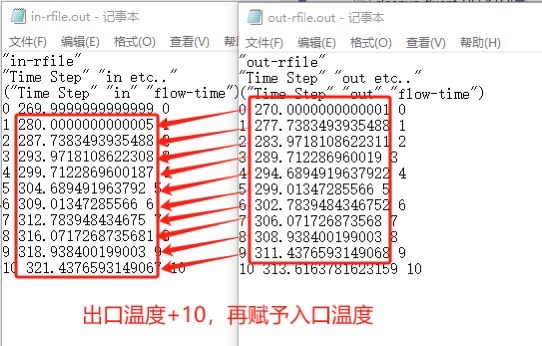
FLUENT与MATLAB联合仿真计算,基于UDP,可在MATLAB实现复杂数据计算处理。提供两个软件数据交互方法和接口,FLUENT数据传递给MATLAB后,可以用任意方法处理,最后再回传给FLUENT处理后的数据。本案例只是简单演示效果,可以实现复杂功能。在工程和科学计算领域,FLUENT和MATLAB都是非常强大的工具。FLUENT擅长流体动力学等复杂物理现象的模拟,而MATLAB则在数据处
硬件部分最骚的是PCB上直接集成了三菱编程口的电平转换电路,连USB-SC09-FX编程线都省了,直接插USB线就能开搞。产品功能描述:用梯形图语言编写应用程序,可以直接使用三菱编程软件GX Developer或者GX Works2编程、下载、调试、监视(可以监视中写入方便调试),不需要软件转换,和正规PLC一样的下载方式。看原理图时发现个彩蛋:STM32的GPIO口配置成开漏模式时,电平转换芯片
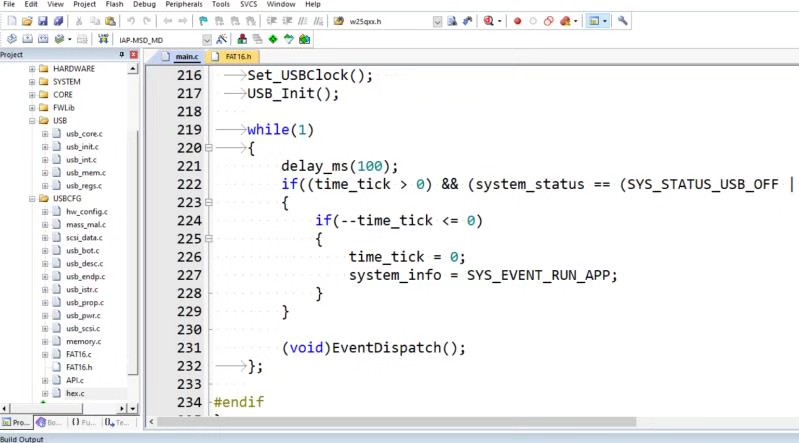
Bootloader检测到文件写入后,擦除Flash,把新固件烧录到指定地址,最后跳转到APP程序执行。所以不能简单检测到文件写入就立即升级,得等文件传输完全完成。最近在折腾STM32F103的USB固件升级方案,发现用U盘模拟方式升级真的挺方便。插上USB线就能当U盘用,直接把bin文件往里一扔就完成升级,这操作对产线工人简直不要太友好。最后提个安全机制:最好在APP程序开头加个强制进入升级模式
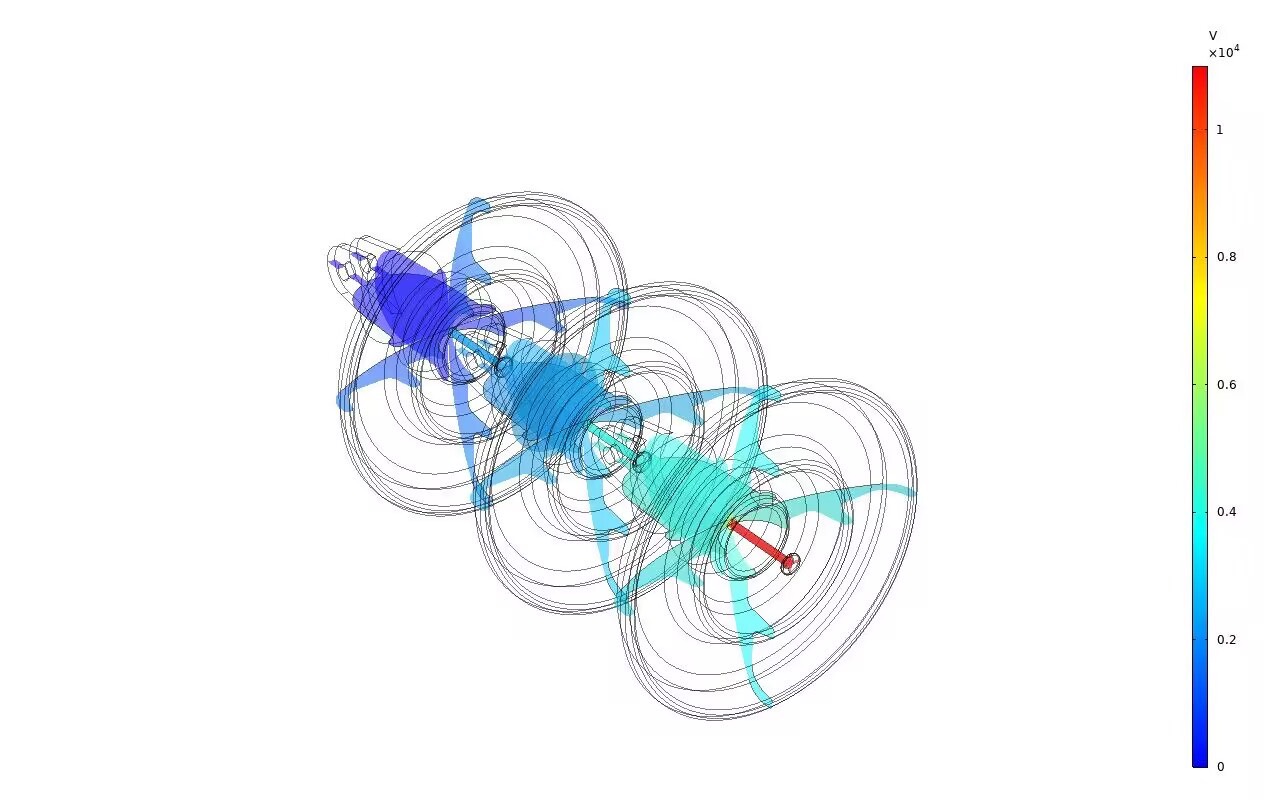
学习COMSOL电场仿真,推荐从官方案例库的"高压套管"模型入手。有个叫"参数化伞裙角度对场强影响"的案例特别实用,能快速掌握几何参数化扫描技巧。遇到求解不收敛时,记得检查材料参数数量级和接触边界设置——这是新人最容易踩的两个坑。传统手算方法难以应对复杂三维结构,最近用COMSOL做了个悬浮绝缘子的电场仿真模型,发现这类数值模拟能直观呈现伞裙边缘的场强集中现象。边界条件设置是核心难点。comsol
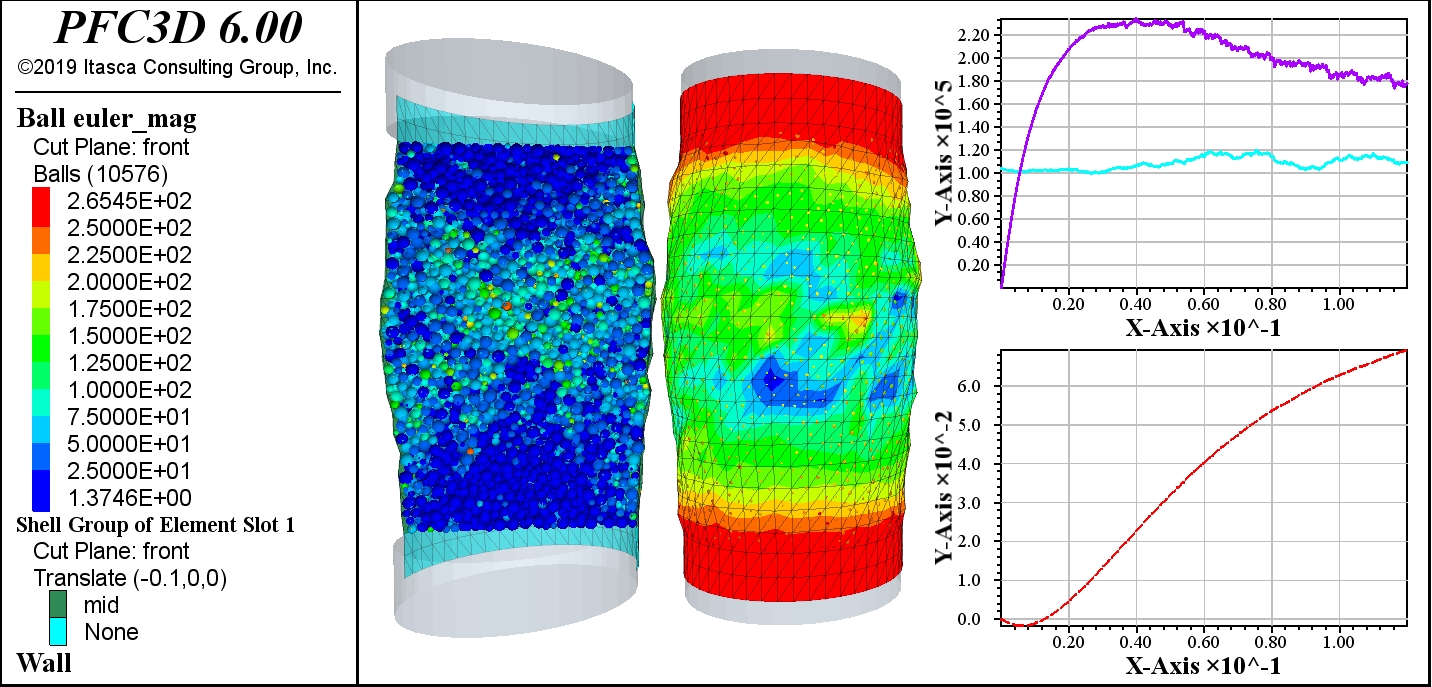
最近在搞PFC6.0和FLAC的耦合计算,三轴试验的体应变分析效率提升明显。直接拿球颗粒膜做边界替代传统的柔性膜,发现个有趣的现象——当围压加载到峰值时,颗粒膜表面居然能自然形成波浪形褶皱,这可比有限元模拟的"橡皮膜"真实多了。用PFC的颗粒膜当边界,配合FLAC做应力传递,实测发现20万颗粒规模的模型,计算时间直接从8小时压缩到2小时。这行代码贼有意思,它让颗粒的接触刚度随着位移平方增长,既能保
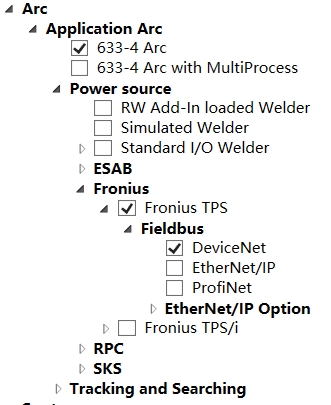
ABB选项添加,ABB机器人三种方法全套,真实、虚拟、密钥三种方法,含教程、含软件、含密钥,想怎么加就怎么加,想用真实密钥就用真实密钥,想用虚拟密钥就用虚拟密钥,随意加。在ABB机器人的使用过程中,添加ABB选项是一项常见且重要的操作。今天咱就来唠唠实现ABB选项添加的三种方法,包括真实、虚拟以及密钥这三种方式,还会附上详细教程、相关软件以及密钥获取等内容,让你能随心所欲地添加选项。
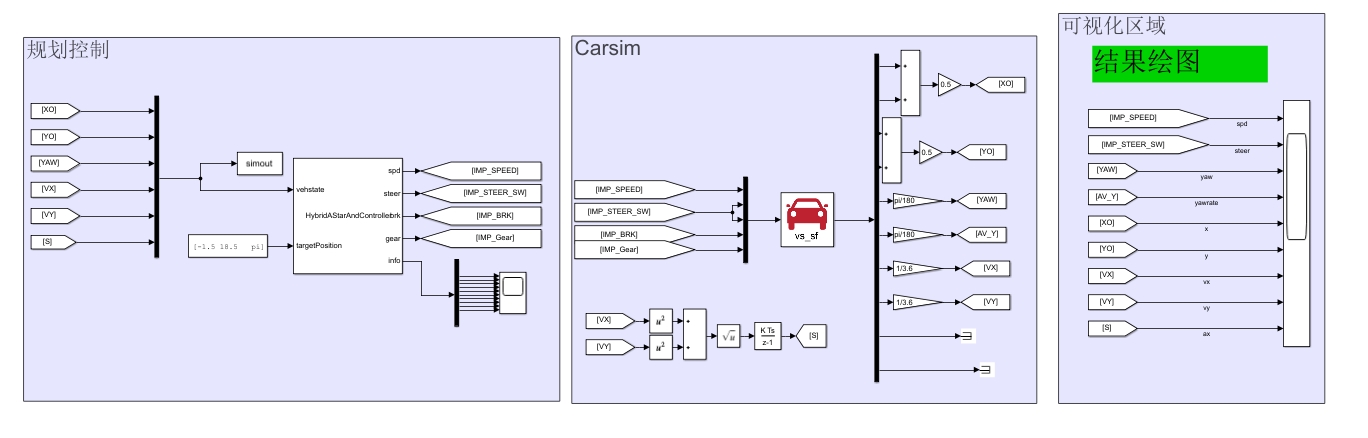
调完记得在Simulink里加个速率限制器,不然方向盘转角变化太猛,Carsim会报动力学错误。有个取巧的办法:在路径预处理时,在拐点前后各插入三个虚拟点,让拟合曲线自然过渡。这代码里的1e-5可不是随便写的,之前没加这个极小值时,车辆静止状态直接算出来NaN,整个控制直接崩了。停车场低速导航这事儿听起来简单,实际调起来能把人逼疯。这预瞄点算法看着简单,但在停车场环境里有个坑——车速低于5km/h