- @2508_94201670
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
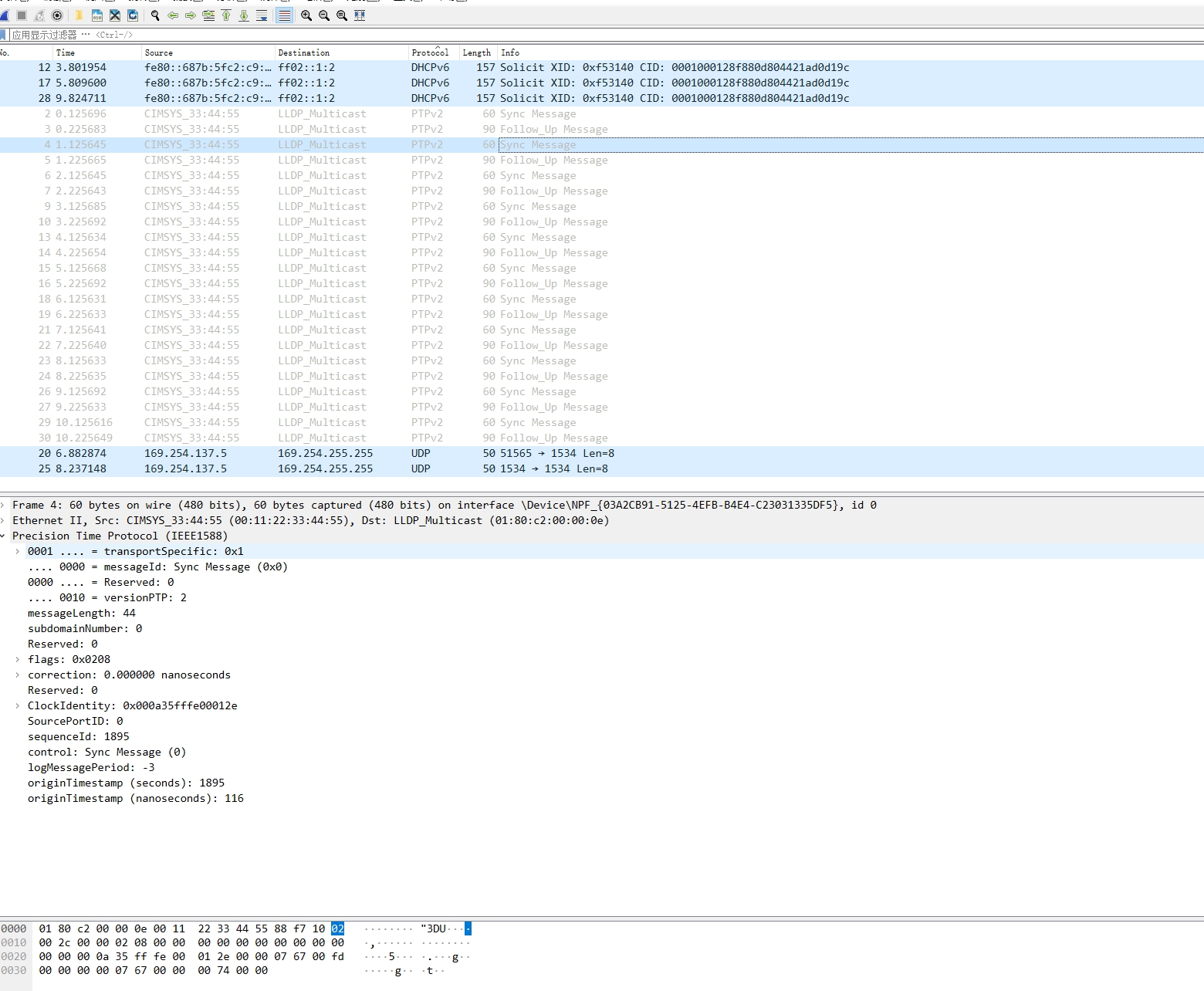
今天咱们撸一把TSN里的802.1AS标准,这货号称能实现微秒级的时间对齐,用的还是纯逻辑实现。不过在实际部署时,记得把核心交换机的优先级调到最高,不然车间主任的电脑可能莫名其妙变成主时钟,那乐子就大了。这里用了渐进式调整,0.7这个系数可不是随便来的——实测发现激进调整会引起震荡,就像新手司机猛打方向盘会画龙一样。搞时间同步最怕的就是环路网络,802.1AS的解决方案是生成树协议+主时钟选举。p
调整k值时发现个玄学现象——当k值达到模型不确定性上界的1.2倍时,系统突然从哈士奇变德牧,收敛速度快得离谱。最近在搞机器人运动学控制的项目,发现滑模控制这玩意儿真是又爱又恨。今天拿Simulink搭了个仿真模型,实测滑模边结构控制的魔法效果,给大家扒一扒怎么玩转这个暴力美学控制器。注意这里用饱和函数代替传统的sign函数,相当于给滑模面加了缓冲带,实测能减少60%以上的抖振现象。机器人运动学控制

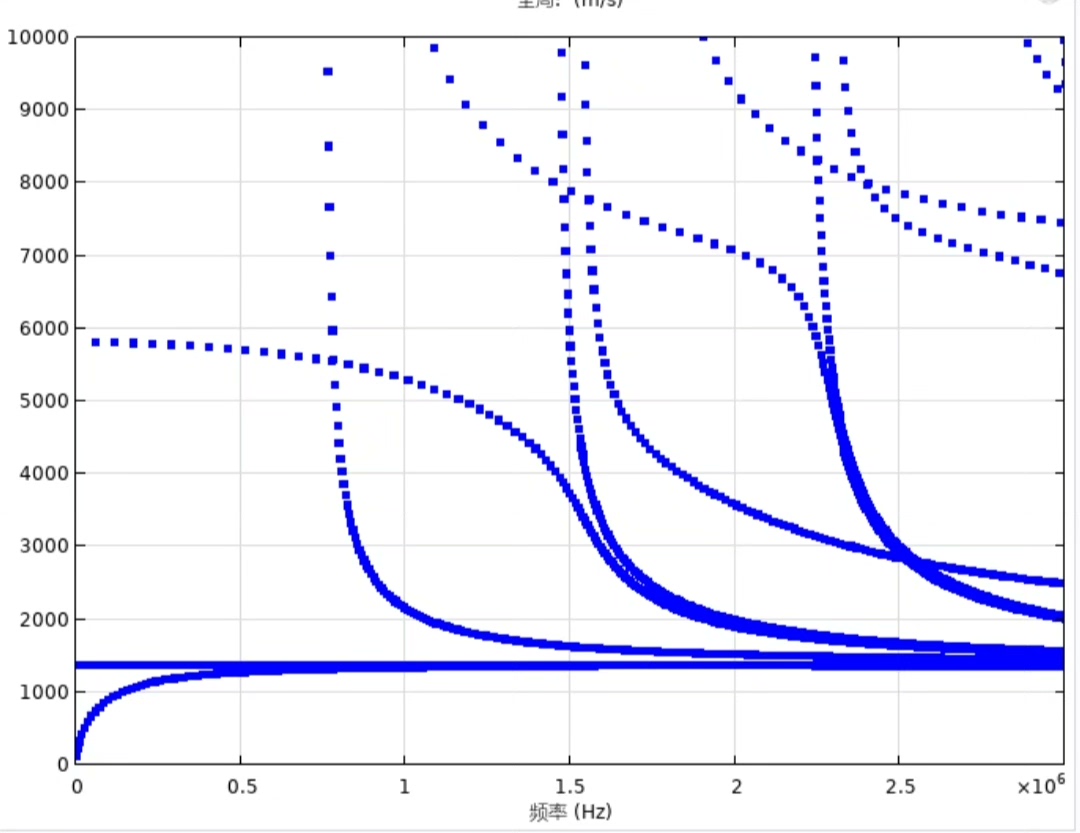
有限元部分用到了MATLAB自带的PDE工具箱,这里注意网格尺寸要足够小,不然高频段的结果会飘。一般来说网格尺寸取波长的1/6~1/8,这里直接按板厚的五分之一来划分,够用了。有个坑要注意——solve函数返回的模态可能包含非传播模态,所以用valid_modes筛选出频率附近的真实Lamb波模态。最近在搞超声导波检测,发现Lamb波的频散曲线计算是个绕不过去的坎。注意看高频段S0模态的群速度会趋
这套方案最狠的地方在于冗余设计——交换矩阵的DDR3布线做了蛇形等长处理,但同时在PCB的工艺边上预留了阻抗测试点。说到底,好设计都是被产线虐出来的,这套板子上的每个过孔都透着实战派的硬核气息。拆开RTL8370N交换机的包装盒,扑面而来的是熟悉的松香味——这板子绝对是个实战派选手。今天咱们要聊的这套千兆交换方案,可不是实验室里的玩具,而是实打实跑过流水线的硬通货。PCB的散热设计有门道:在芯片底
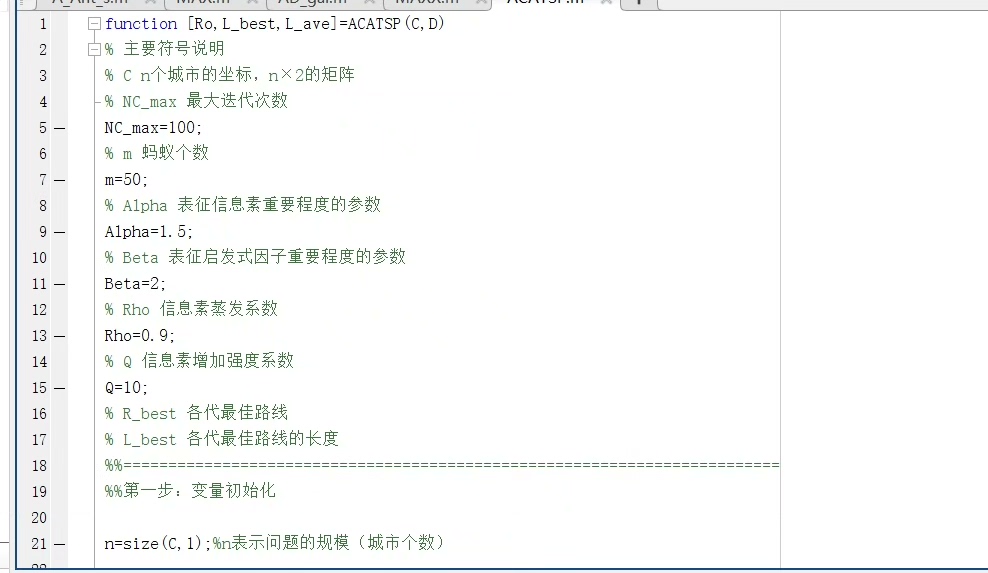
把所有点位两两之间的路径都算出来后,咱们就得到了一张路径代价矩阵——这相当于给后续的蚁群算法准备了城市距离表。厨房飘着咖喱香,送餐机器人小R盯着屏幕上闪烁的八个取餐点坐标,触角天线微微颤动——今天的路径规划挑战开始了。生成的0-3、3-1、1-2、2-0的路径片段连接起来。总路径长度校验时要注意转角处的距离计算——有些时候直接相加会比实际走出来的路线短,这时候需要重新跑一遍完整路径的A。2,蚁群算
本课程基于Abaqus,应用两种加载方式一-FluidCavity与Pressure分别介绍了气动驱动软体机器人仿真分析流程。该软体机器人涉及两种材料,主变形部分选用超弹性材料,应用Yeoh本构定义材料属性;限制层部分定义为线弹性材料。此外,对结果的后处理进行了简要介绍。想学轮胎充气、气囊充气、各种充气分析都能用最近学习了一个超有意思的课程,基于Abaqus平台,深入探讨了气动驱动软体机器人的仿真
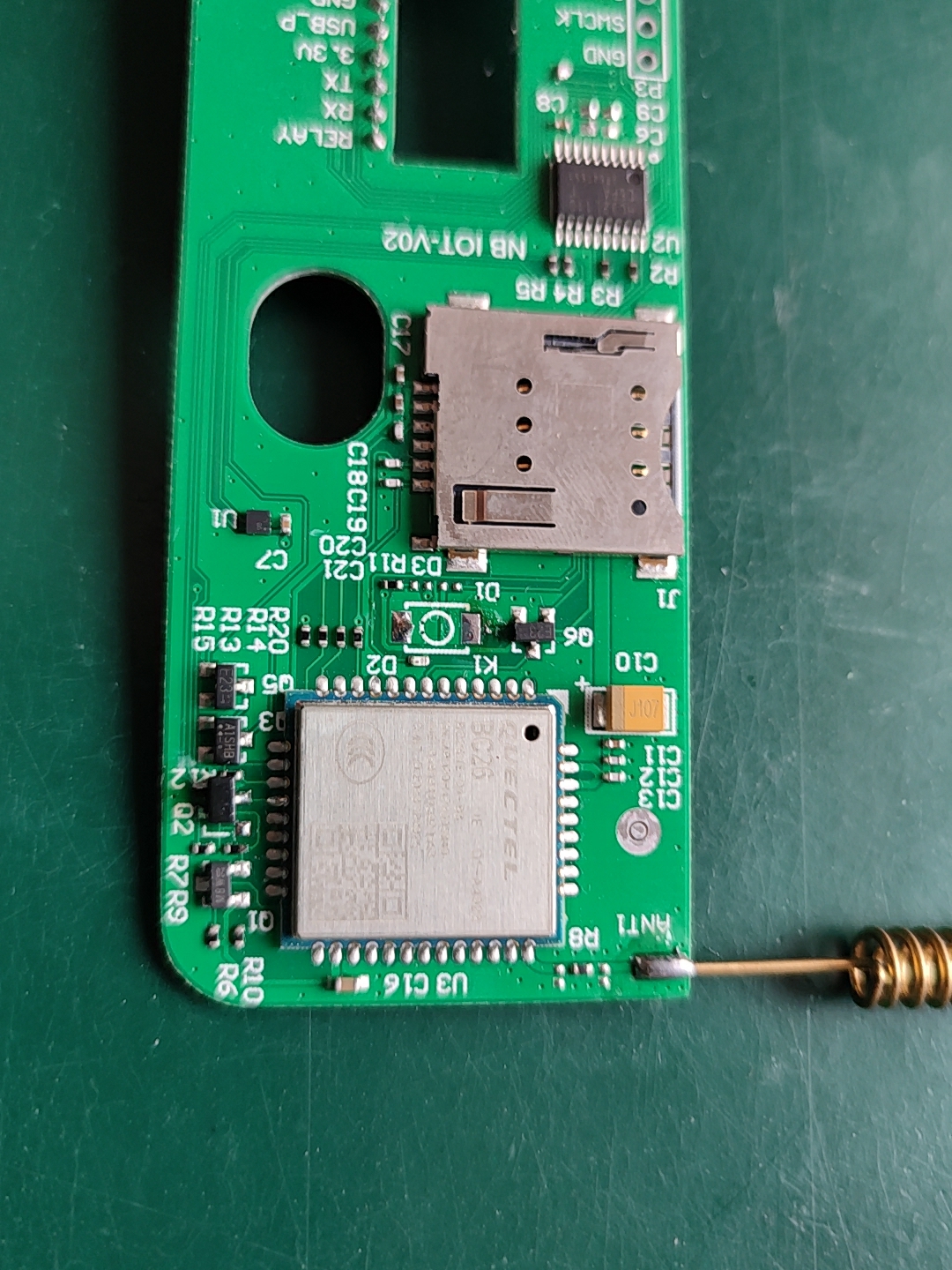
首先,BC26模块是个好东西,低功耗、支持NB-IoT,特别适合这种需要长时间运行的设备。不过,经过一番折腾,终于搞定了,感觉还是挺有成就感的。其实这里可以优化一下,比如根据温度变化来调整采集频率,温度变化快的时候多采集几次,变化慢的时候少采集几次,这样可以进一步降低功耗。来格式化JSON数据,虽然简单,但要注意缓冲区的大小,不然很容易溢出。刚开始的时候,读取的数据老是错的,后来发现是时序没控制好
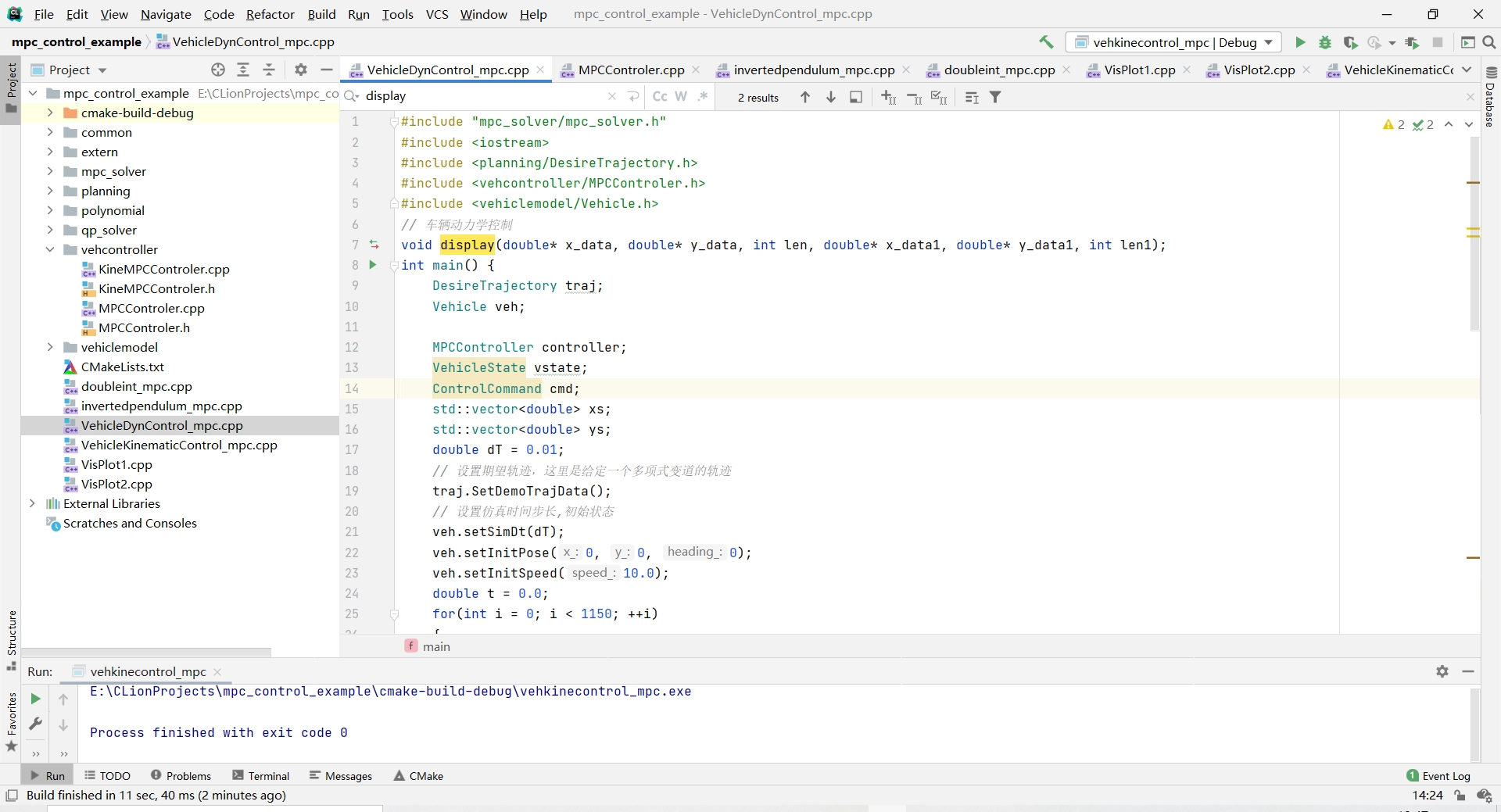
本文档所分析的MPC控制代码,通过模块化设计实现了车辆轨迹跟踪的完整解决方案,涵盖“模型仿真-控制计算-结果可视化”全流程,支持多场景适配与跨平台运行。多模型支持:动力学与运动学模型覆盖高低速场景;可视化完善:轨迹对比与数据监控辅助调试与分析;可扩展性强:模块解耦便于算法升级与功能扩展。增加MPC控制器参数配置界面,支持实时调整权重系数、预测时域等参数,无需重新编译代码;集成车辆状态实时采集接口(
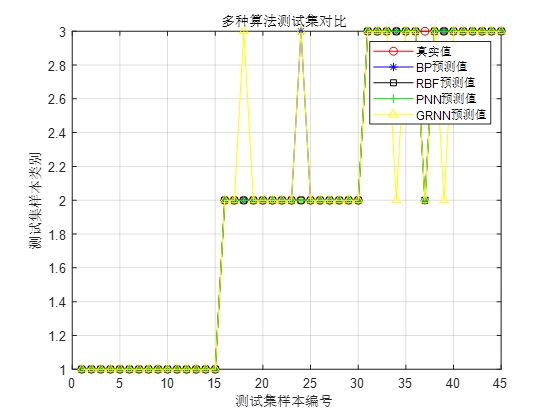
多种算法分类对比;MATLAB、Python程序修改、代写,深度学习,机器学习。只需替换数据即可,提高效率。回归,分类,优化算法等,(lssvm、svm、rf、elm、bp、rbf、pnn、grnn、sae、dbn、dbn-elm、dbn-svm)等。
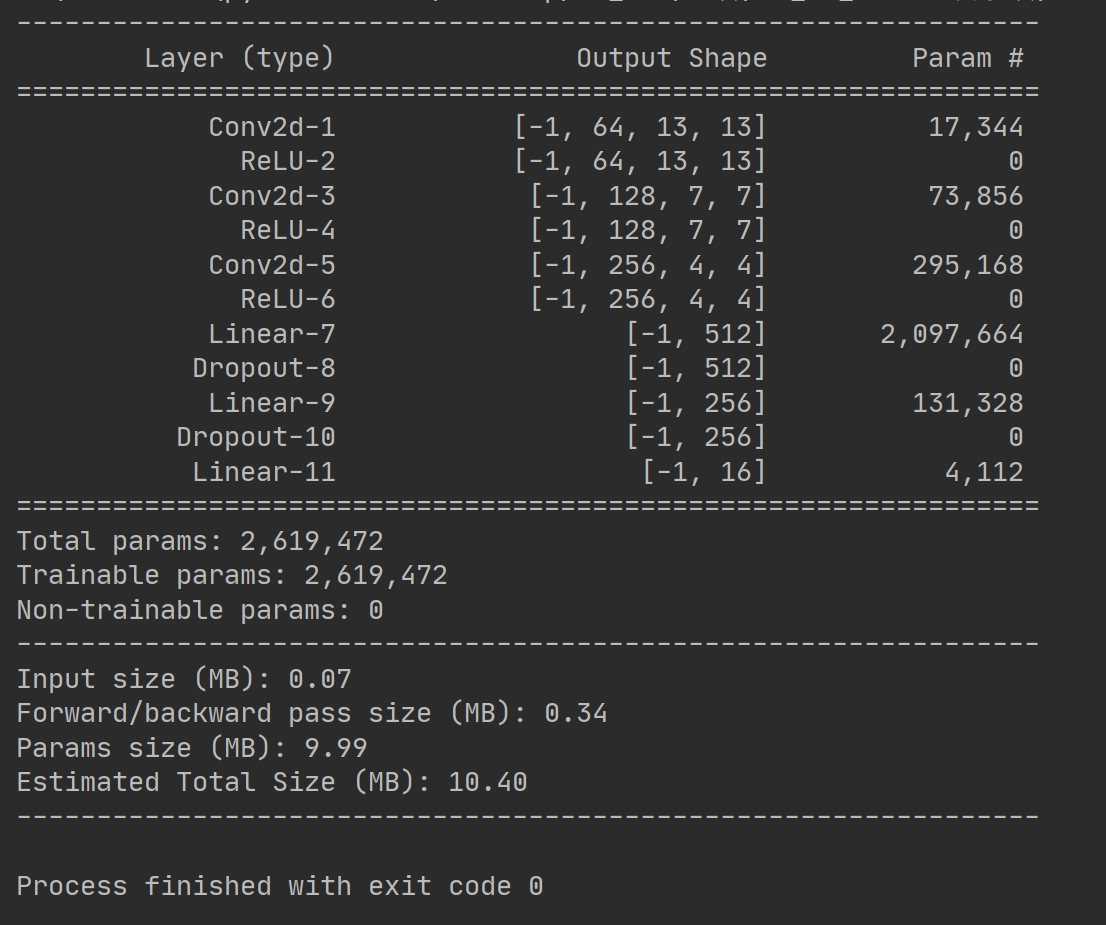
高光谱图像分类2D_CNN网络代码 基于pytorch框架制作全套项目,包含网络模型,训练代码,预测代码,直接下载数据集就能跑,拿上就能用,简单又省事儿内附indian pines数据集,采用20%数据作为训练集,并附上迭代10次的模型结果,准确率99左右。最近在研究高光谱图像分类,发现基于PyTorch框架搭建的2D_CNN网络真是又简单又高效,今天就来和大家分享一下这个全套项目,保证直接下载数