- @2504_94292266
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
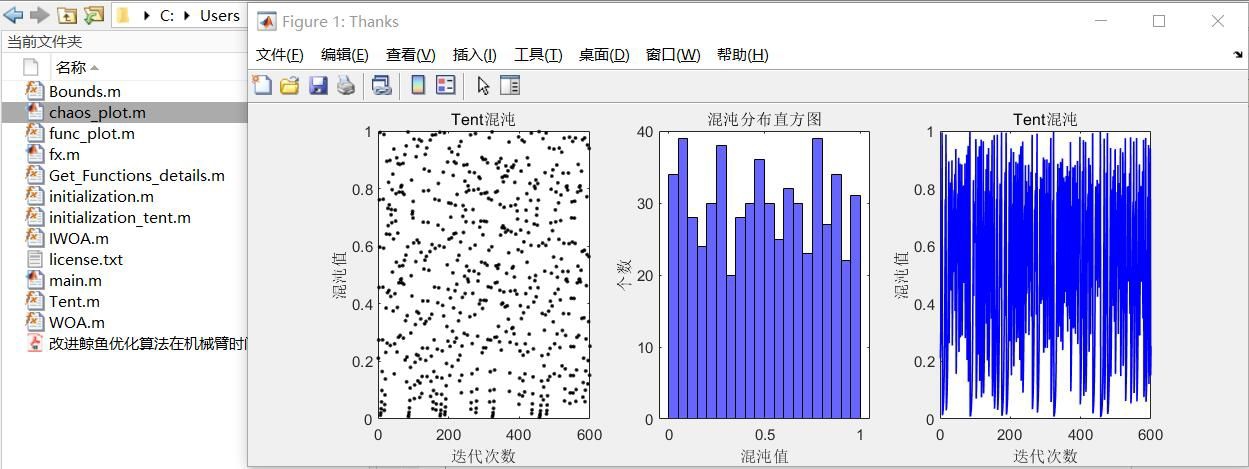
鲸鱼优化算法(WOA)文章复现:《改进鲸鱼优化算法在机械臂时间最优轨迹规划的应用_赵晶》策略为:Tent混沌初始化种群+非线性权重改进位置更新+非线性概率转换——IWOA。复现内容包括:改进算法实现、23个基准测试函数、文中相关因子分析、文中相关图分析、与WOA对比等。代码基本上每一步都有注释,非常易懂,代码质量极高,便于新手学习和理解。本套代码围绕改进鲸鱼优化算法(Improved Whale
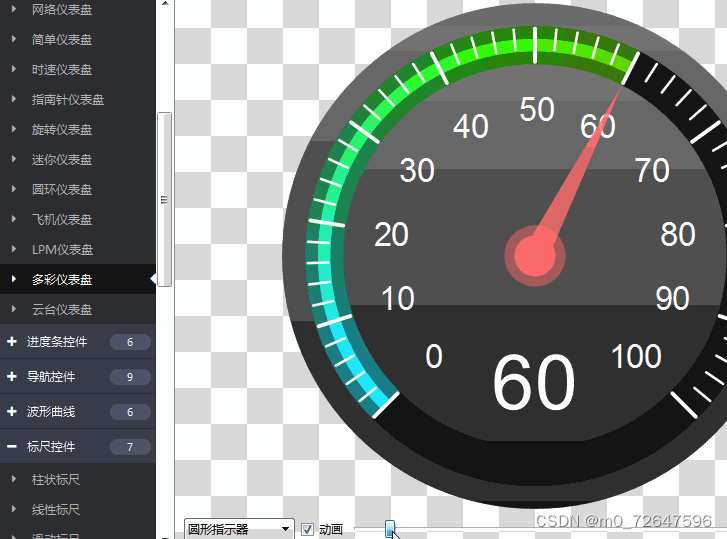
2. 涵盖了各种仪表盘、进度条、进度球、指南针、曲线图、标尺、温度计、导航条、导航栏,flatui、高亮按钮、滑动选择器、农历、广告轮播、饼状图、环形图、时间轴、拓展控件、增强控件等。比如,你想学习如何使用曲线图控件,你可以直接查看。最让我惊喜的是,这个库还支持编译生成设计师插件,你可以直接将控件集成到QtCreator的控件栏中,像使用自带控件一样使用它们。8. 支持编译生成设计师插件,可直接集
最近在折腾二维码相关的项目,发现OpenCV自带的二维码识别模块比想象中好用。直接上实战吧,咱们用Python搭个既能生成二维码又能识别各种来源的GUI工具,代码量控制在300行内就能实现。这里有个坑要注意的是error_correction参数,设置纠错等级直接关系到二维码破损后的识别能力。重点在detectAndDecode这个方法,返回值中的bbox保存了二维码四个角的坐标。基于opencv

话说回来,他们的深度学习模块训练出来的模型,部署时要注意输入图像的归一化方式,有个学员用OpenCV做预处理结果不准,后来发现海康的归一化是除以255再减0.5,和常规做法不一样。整套资料里最值钱的是那套通讯故障排查手册,像三菱PLC的FX5U偶尔会报"无法建立连接",手册里写着要改GX Works3里的以太网模块参数,把TCP保持连接时间从默认120秒改成0(无限)。所以算法优化真不一定是代码层

比如安全响应速度与生产节拍的矛盾——把光栅响应从50ms改成30ms确实更安全,但导致产线节拍下降5%,最后根据风险评估取了折中值。这活不仅涉及常规IO控制,还整合了安全回路、区域互锁、多设备协同,堪称工业自动化项目中的"满汉全席"。项目源码里埋了不少"彩蛋":比如用DB块注释记录机械坐标系原点的定位过程,在FC105功能块里备注某处滤波系数是咋试出来的。配合SEW电机的定位控制,当机器人进入敏感

通过在MATLAB r2018a环境下,利用深度学习对NASA涡扇发动机退化仿真数据集进行处理,我们成功实现了剩余使用寿命的预测。从数据读取预处理,到模型构建、训练和预测,每一步都紧密相连。当然,实际应用中还可以进一步优化模型结构、调整参数,以提高预测的准确性。希望这篇博文能给对这方面感兴趣的小伙伴一些启发!
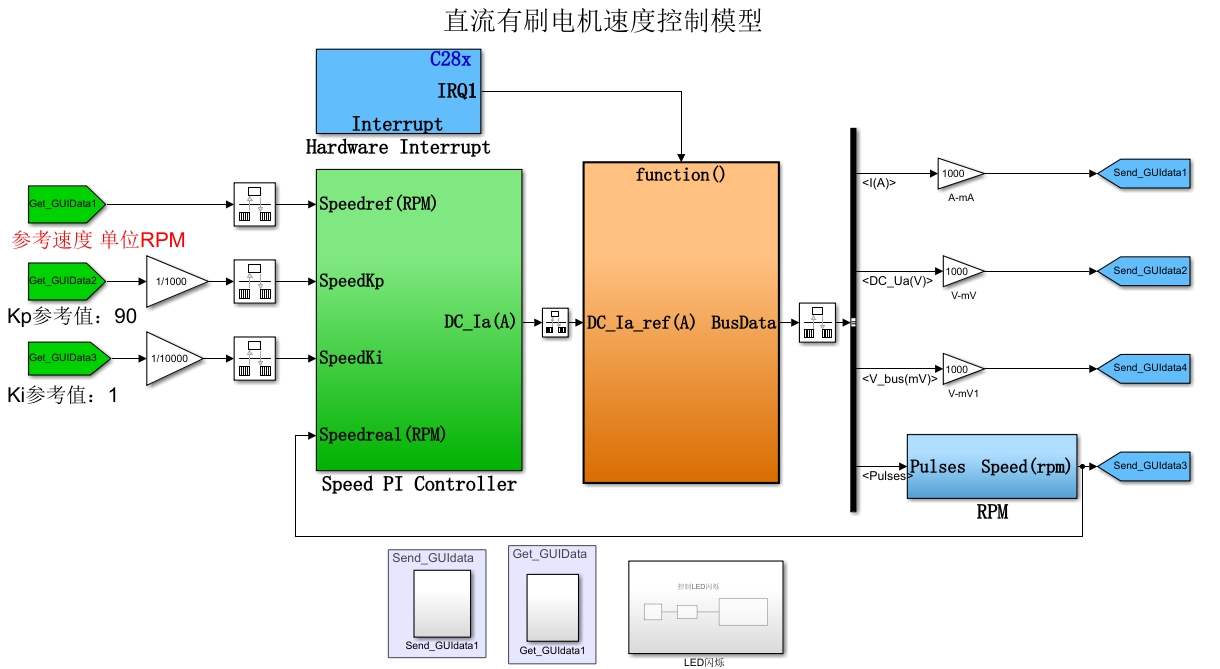
模型里配置ADC模块时,如果直接拖官方模块生成代码,采样窗口可能对不上,得在Simulink的ADC配置里把acqps参数从默认的14改成9,对应实际采样保持时间=9*12.5ns=112.5ns,刚好匹配我们板子的电流传感器响应时间。最爽的是整个开发流程——直接在Matlab Simulink里搭模型,自动生成CCS工程代码,烧录到板子上就能跑。主控芯片dsp tms320f28335,基于Ma
最近在搞T型3电平逆变器的项目,发现LCL滤波器参数和损耗计算这块儿特别容易踩坑。咱们直接上硬货,手把手用Mathcad整活。先来张系统框图镇楼(假装有图),闭环结构用电压外环+电流内环双环嵌套,有源阻尼直接上虚拟电阻法,稳得一批。最后扔个Mathcad模板链接(假装有超链接),参数全带滑动条调节,改个电感值能自动重算所有关联参数。T型3电平逆变器,lcl滤波器滤波器参数计算,半导体损耗计算,逆变
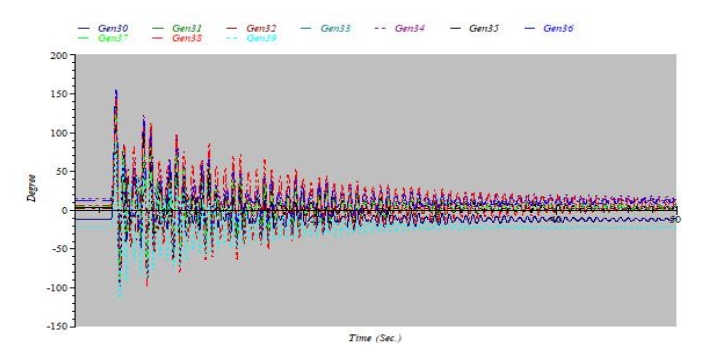
今天咱们直接上硬菜,拿单机无穷大系统和IEEE39多机系统当案例,手把手盘一盘潮流、短路、稳定这三个核心模块怎么玩。说到底,仿真软件只是工具,真正的功夫在参数设置背后的物理直觉。下次遇到计算结果诡异时,先别怀疑软件bug,检查接地方式设置或者变压器分接头位置,往往会有惊喜(或者惊吓)。这里X_d的单位是标幺值,新手容易搞错量纲。多机IEEE39节点系统的潮流计算、短路计算、稳定计算仿真。多机IEE
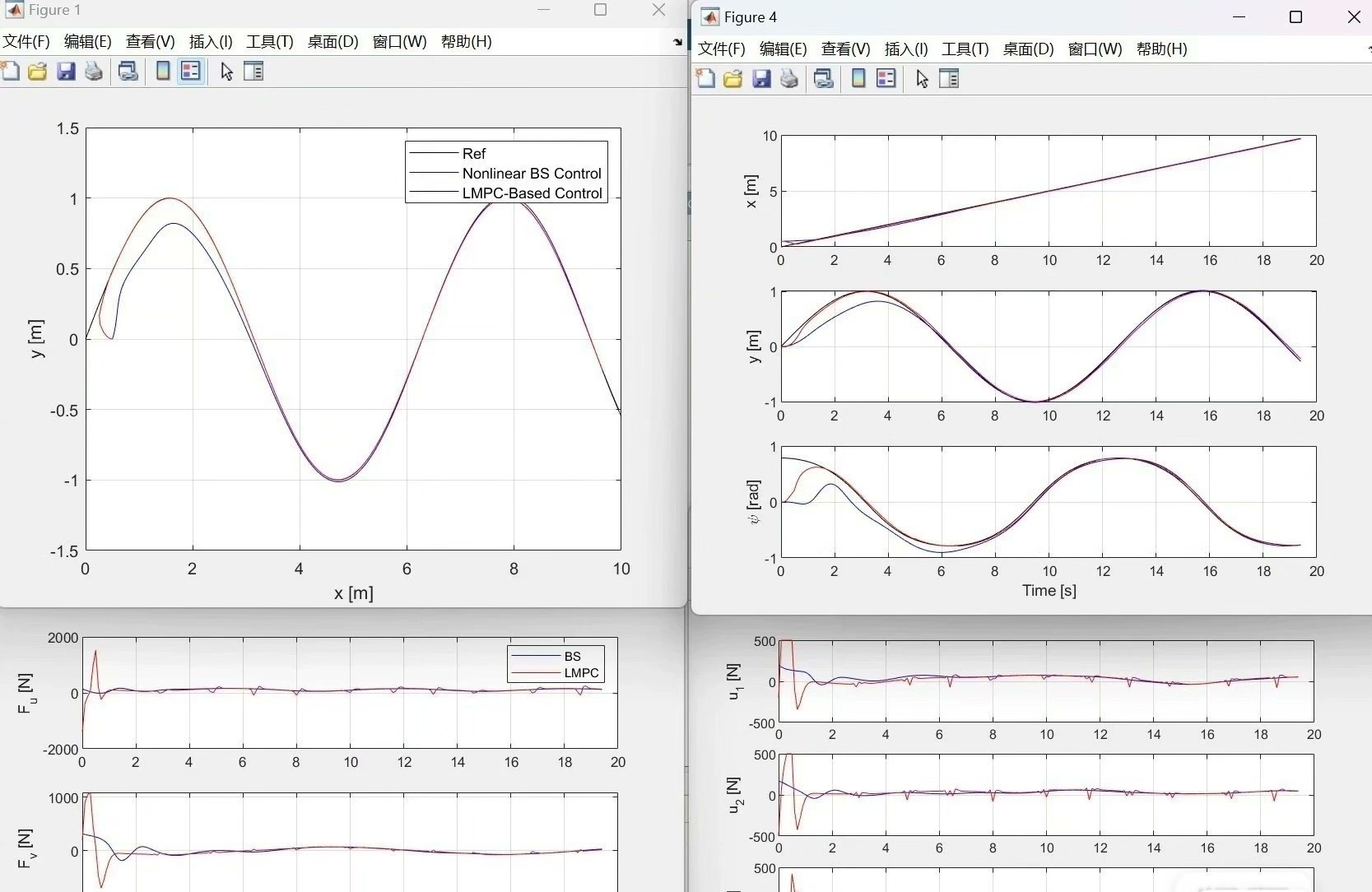
最后放个效果对比图(脑补画面):蓝色参考轨迹上,MPC控制的AUV像吸铁石一样紧贴路径,反步法则像醉酒的水蛇左右摇摆。实测对比数据说话:在1.5节侧向流干扰下,MPC的跟踪误差标准差比反步法低63%,执行器能耗还减少了22%。水下机器人路径跟踪的难点在哪?本代码包括水下机器人的fossen动力学模型,matlab的优化算法求解器,还包括非线性反步法backstepping 的对比代码非常划算,两种