- @2503_94171280
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
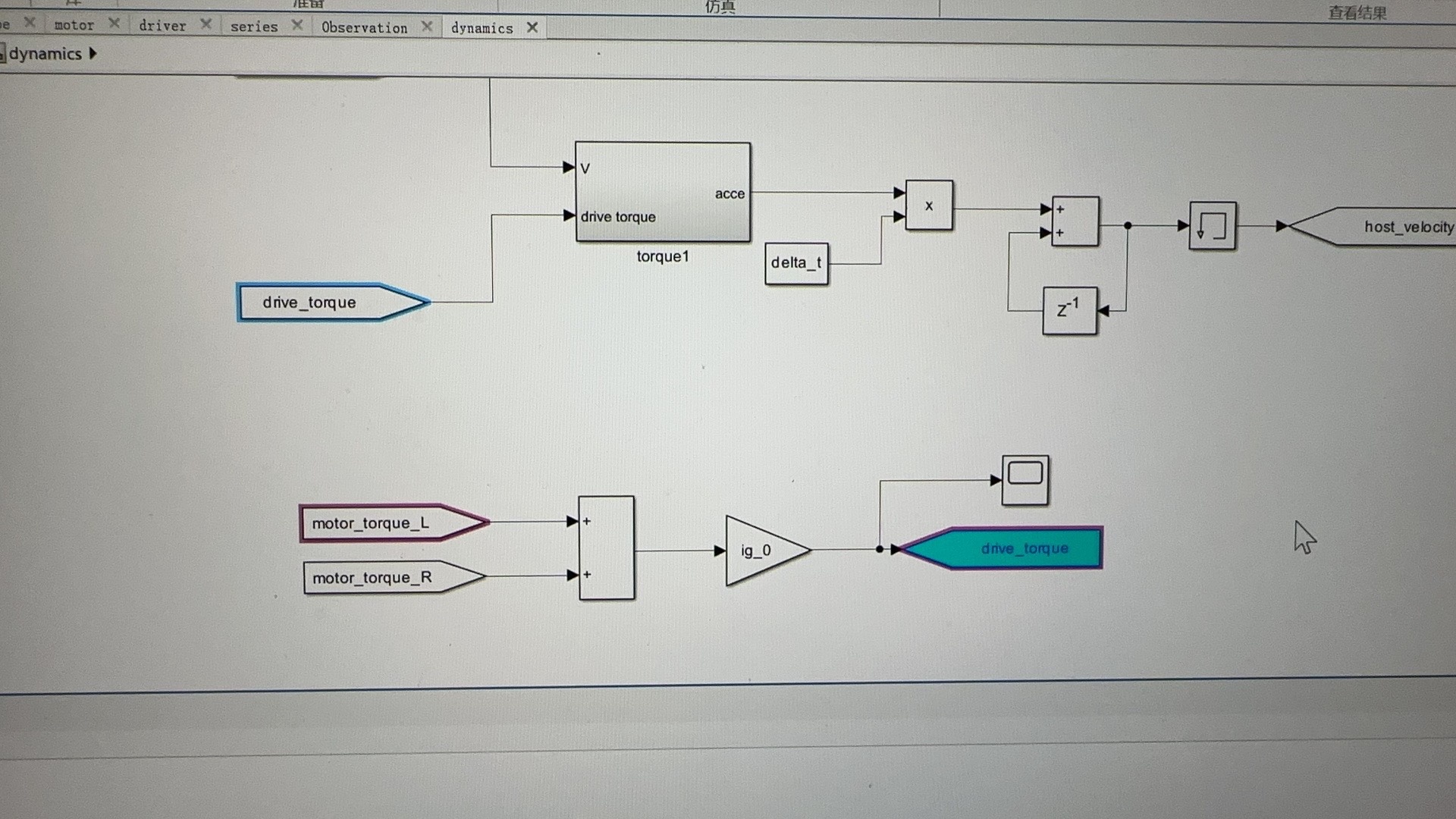
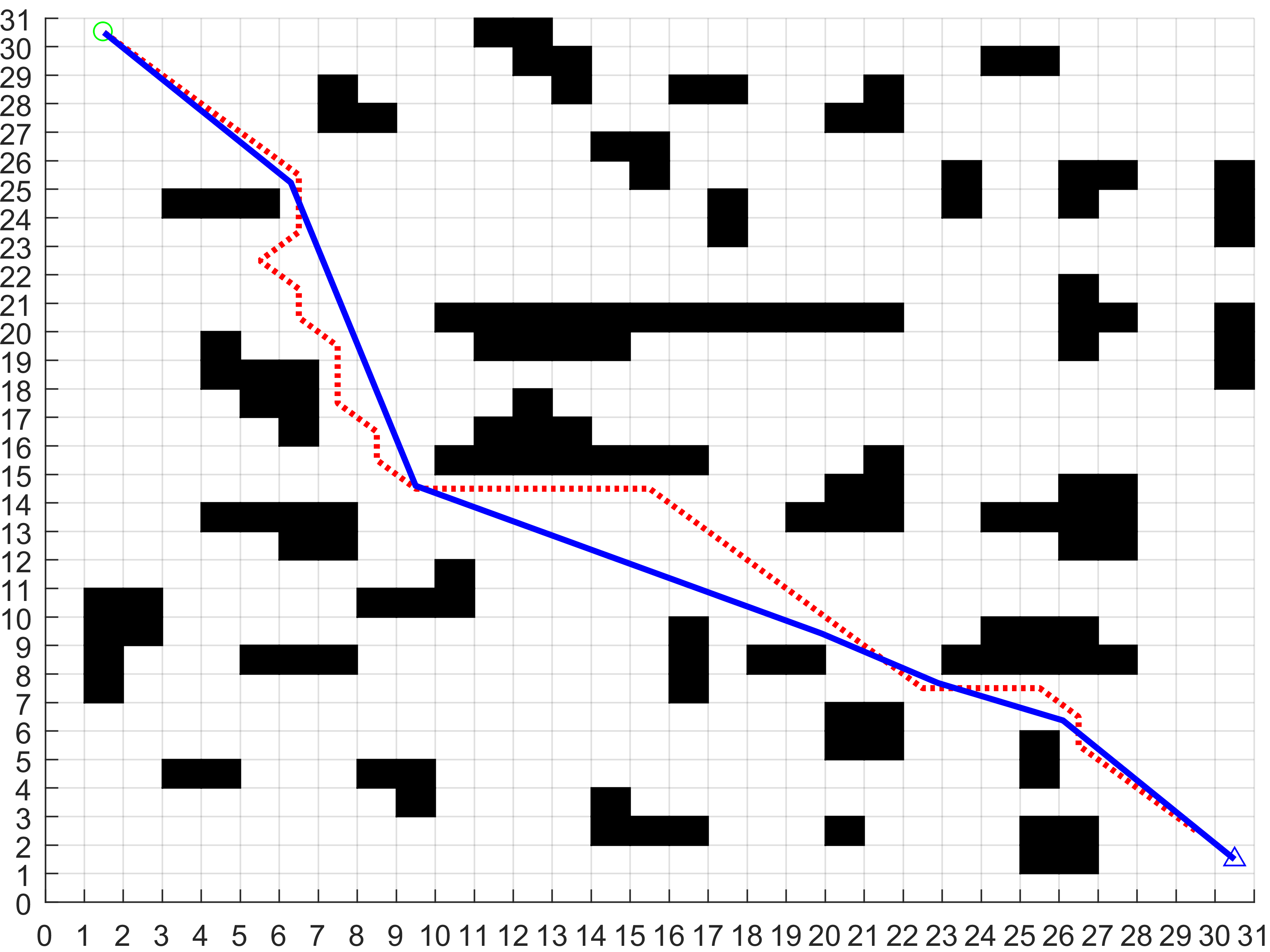
障碍通过后,速度快速恢复,整个过程加速度曲线平滑,没有出现突变——这对实际电机控制非常重要。地图扩展性方面,实测在20x20m地图上,传统A*平均耗时2.3秒,改进版1.7秒(优化了节点扩展策略)。看对比图(假装有图),传统路径(红色)几乎擦着障碍物走,改进后的(蓝色)明显保持安全距离。DWA迅速计算新速度,配合A*的全局信息,生成一个C形绕行轨迹,同时保持与静态障碍物的安全距离。改进A*算法做全
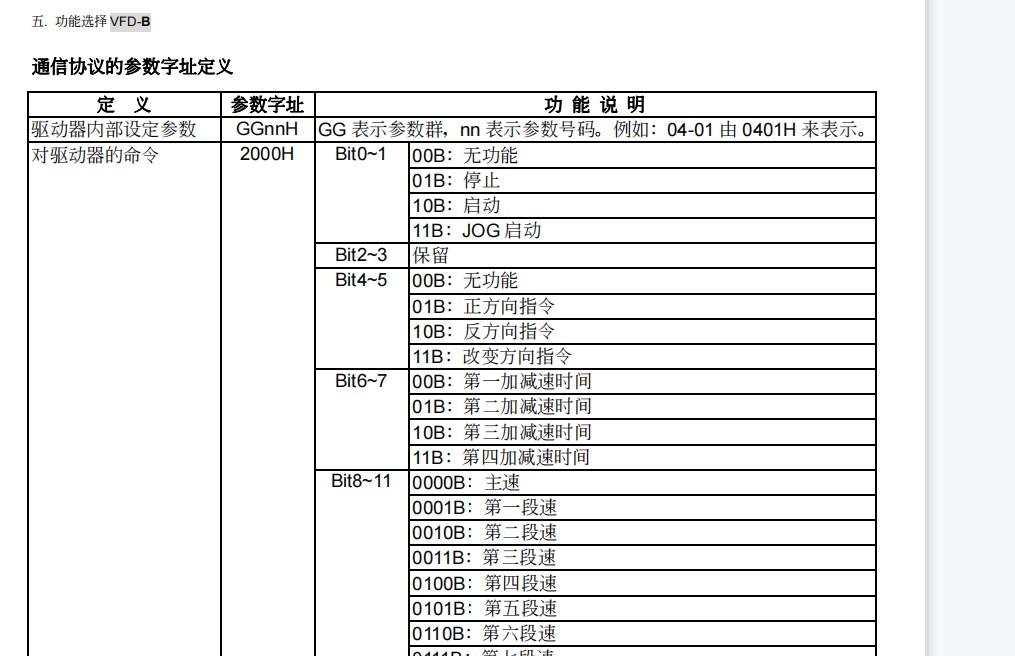
那个/R 32767的操作其实是把-32768~32767映射到-1~1的范围,具体系数要看说明书里的量程定义。最后说个血泪教训:某次现场调试时频繁出现通讯中断,最后发现是变频器参数里有个"通讯超时时间"默认设了2秒,而PLC这边每300ms就发新请求。这事说明书里藏在附录B的脚注里,坑得人差点怀疑人生。轮询西门子200smart与3台变频器9个模拟量输入,程序包括Modbus RTU轮训控制,实
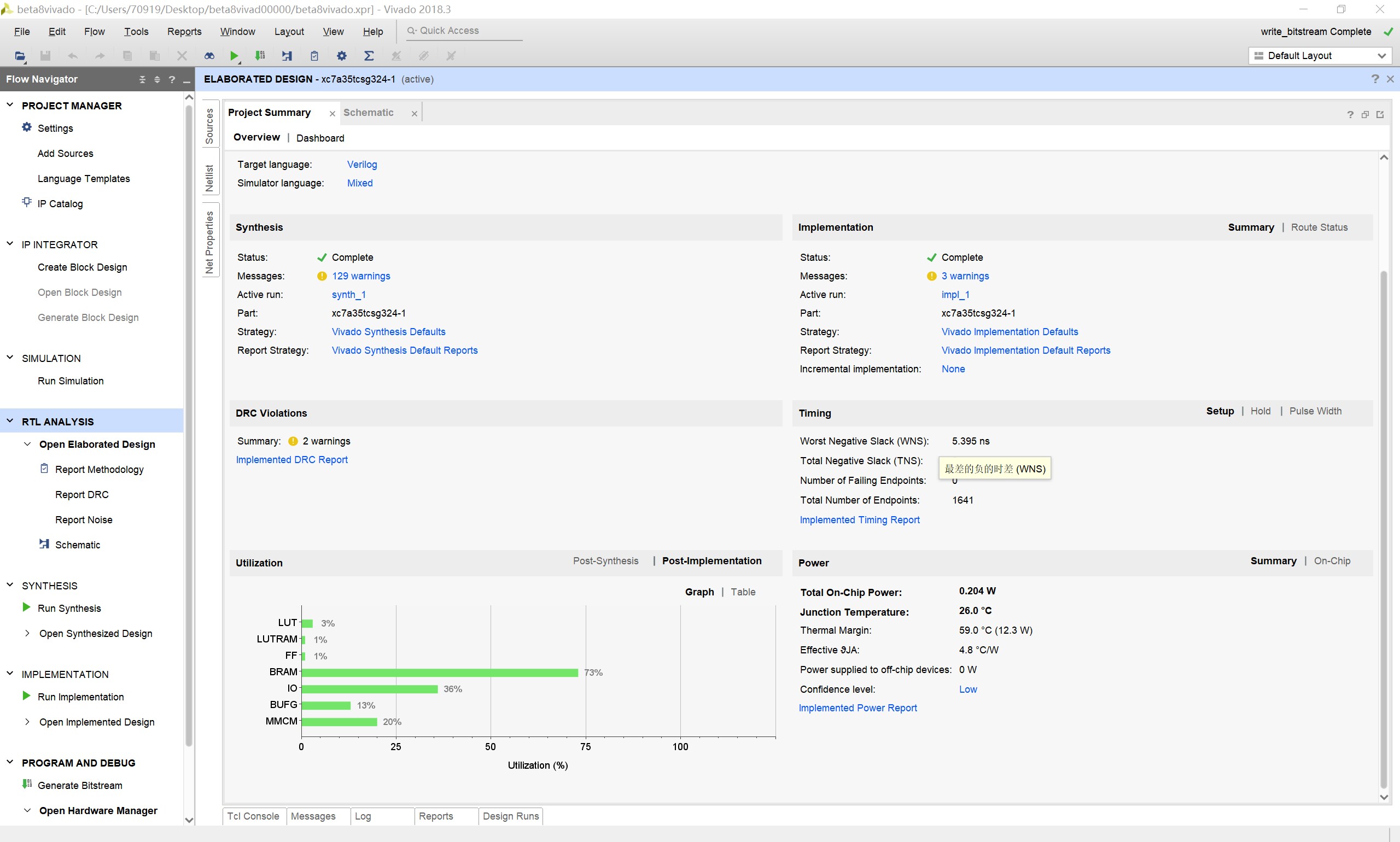
实测效果有点意思:当猫咪从镜头前溜过时,系统延迟只有3ms,比用OpenCV的Python版快了近20倍。咱们今天用FPGA做个能硬件加速的运动追踪系统,帧间差分法这种吃算力的算法交给FPGA跑,比软件方案快出天际。但直接二值化会有雪花噪点,上形态学处理,在Vivado里调用HLS生成的腐蚀膨胀IP核,消耗不到200个LUT。实际部署时发现运动区域支离破碎,上连通域标记算法。基于FPGA的实时图像
基于隐马尔可夫模型HMM的孤立字语音识别Matlab代码模板在语音识别领域,隐马尔可夫模型(HMM)占据着重要的地位。今天咱就来聊聊基于HMM的孤立字语音识别的Matlab代码模板,看看它是如何运作的。
三电平有源电力滤波器全套软硬-件资料基于DSP28335,两套可以直接用的最近在电力电子领域探索,发现了超棒的三电平有源电力滤波器相关资源,必须来和大家唠唠。这次要讲的是基于DSP28335的三电平有源电力滤波器全套软硬件资料,而且有两套哦,都是可以直接上手用的,对咱们搞开发和研究的人来说,简直是福音。
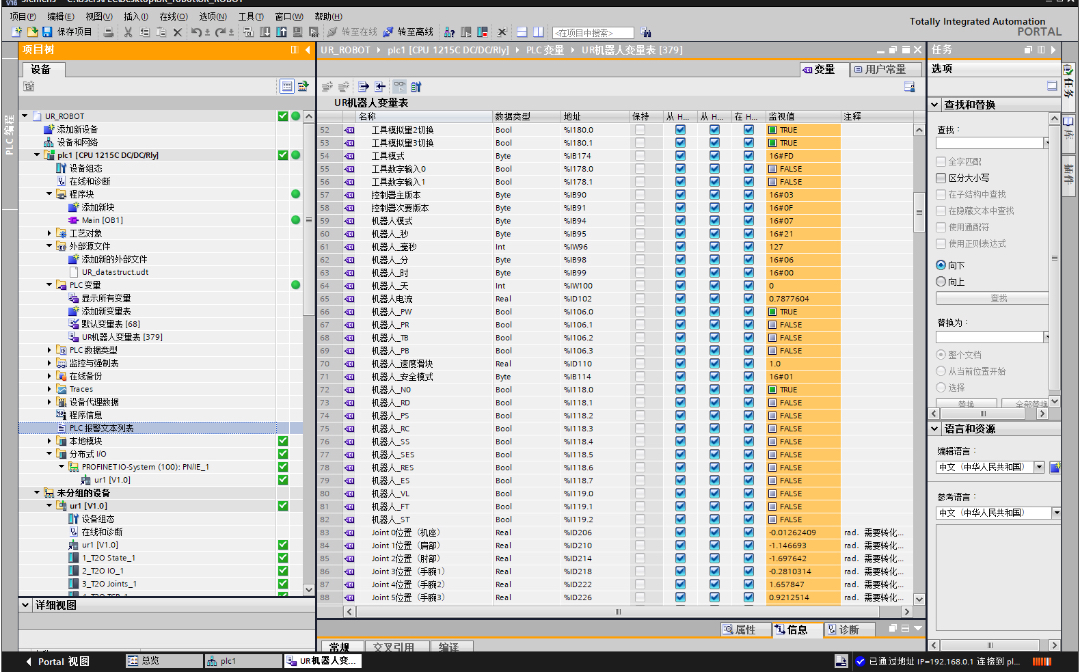
西门子plc博图与优傲UR机器人进行Profinet通讯,s7-1200/1500与UR机器人通讯,实际应用案例使用中,可提供GSD配置文件,设置说明书,和博图plc程序,目前版本为v15或以上,程序只提供配置好的内容配置在自动化控制领域,西门子PLC与优傲UR机器人的协同工作越来越常见,通过Profinet通讯实现二者高效协作能大大提升生产效率。今天就来聊聊S7 - 1200/1500与UR机器
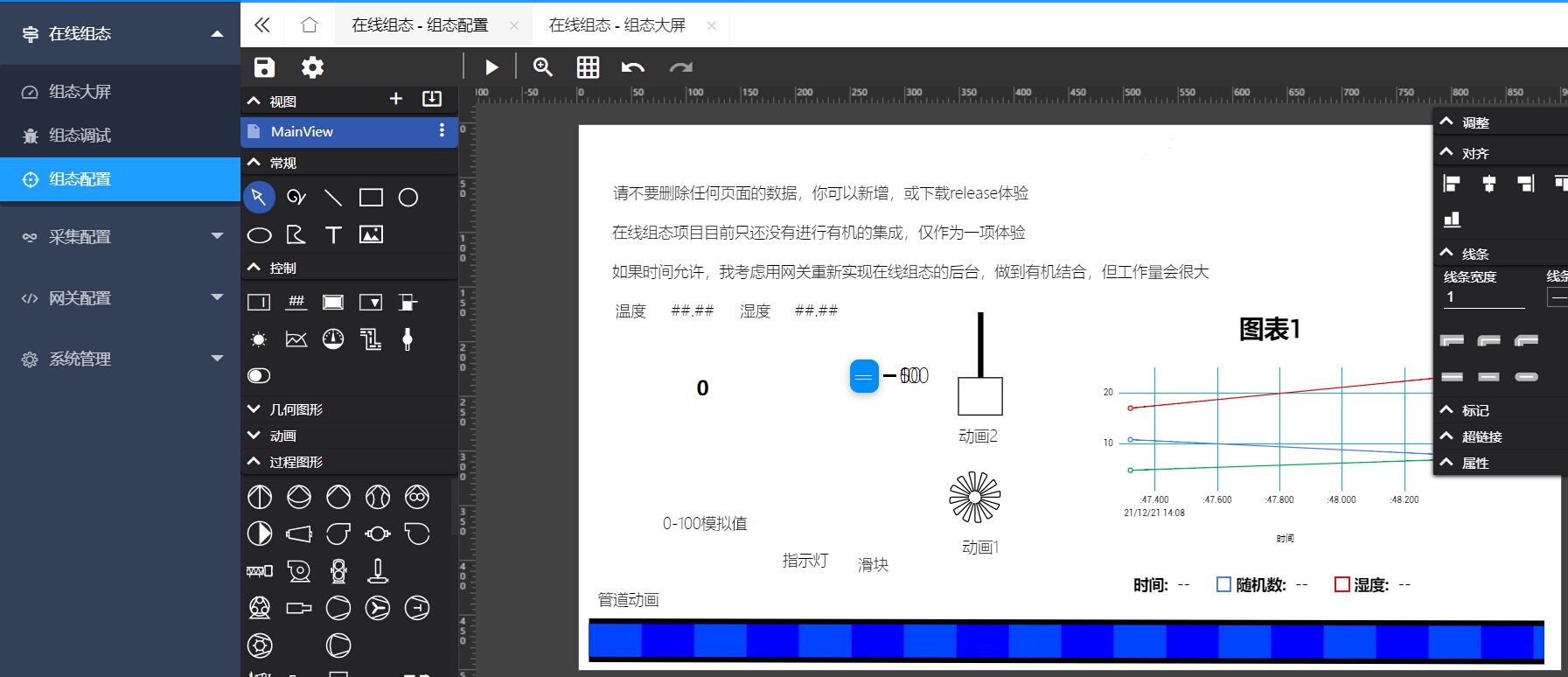
基于.net6的跨平台物联网网关。通过可视化配置,轻松的连接到你的任何设备和系统(如PLC、扫码枪、CNC、数据库、串口设备、上位机、OPC Server、OPC UA Server、Mqtt Server等),从而与 Thingsboard、IoTSharp或您自己的物联网平台进行双向数据通讯。提供简单的驱动开发接口;当然也可以进行边缘计算。抛砖引玉,共同进步基于.net6的开源物联网网关浏览器
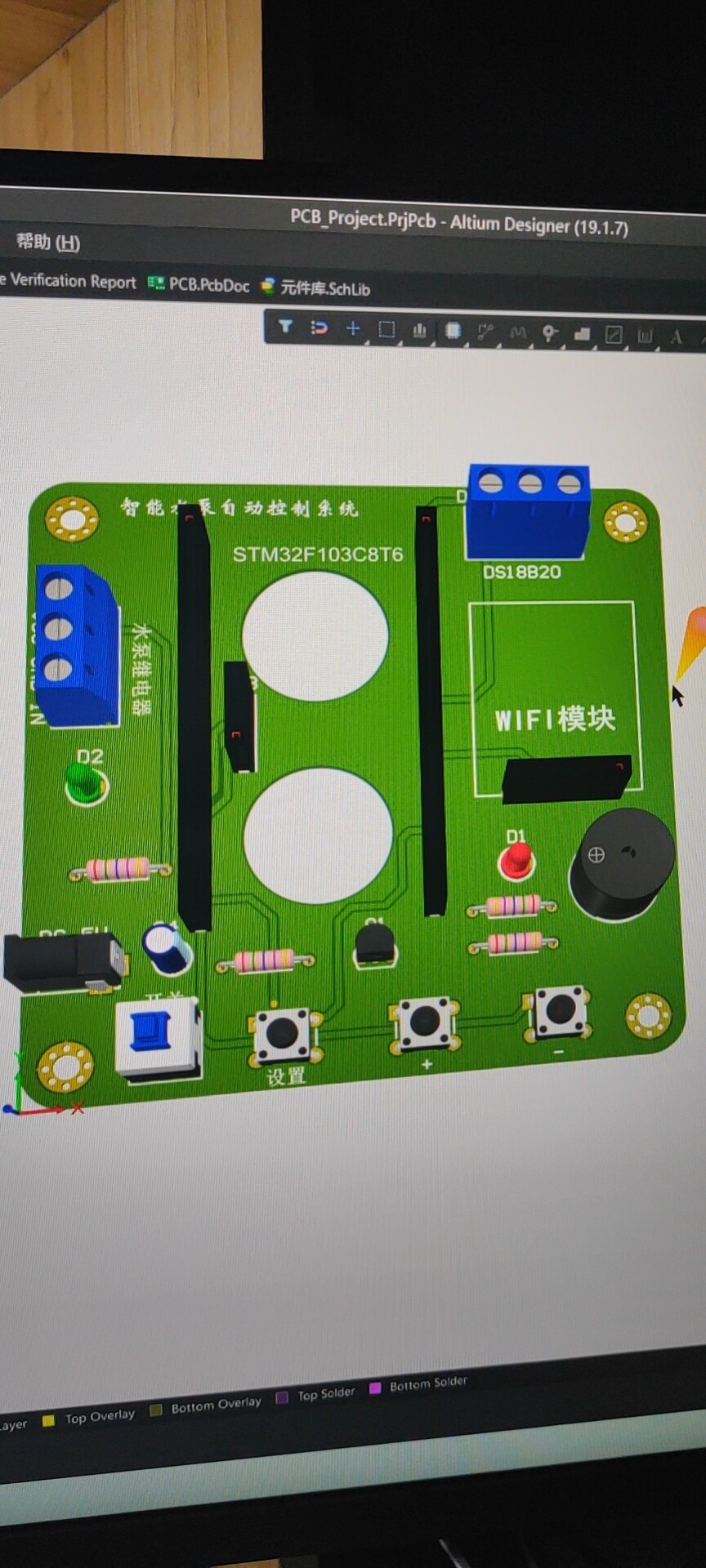
先上干货,整个系统用STM32F103C8T6当大脑,超声波测水位,DS18B20测水温,继电器控制水泵。今天带大家用STM32搞个全自动水位水温控制系统,手机点两下就能远程管理,连阿里云都接上了,卷死隔壁用机械浮球的老王!实测发现继电器物理延迟有0.5秒,所以在逻辑判断里加了软件去抖,比硬件RC电路更省钱。支持: 水位检测、水温检测、水泵控制、水温水位数据分析、已连接阿里云服务器、有手机端APP
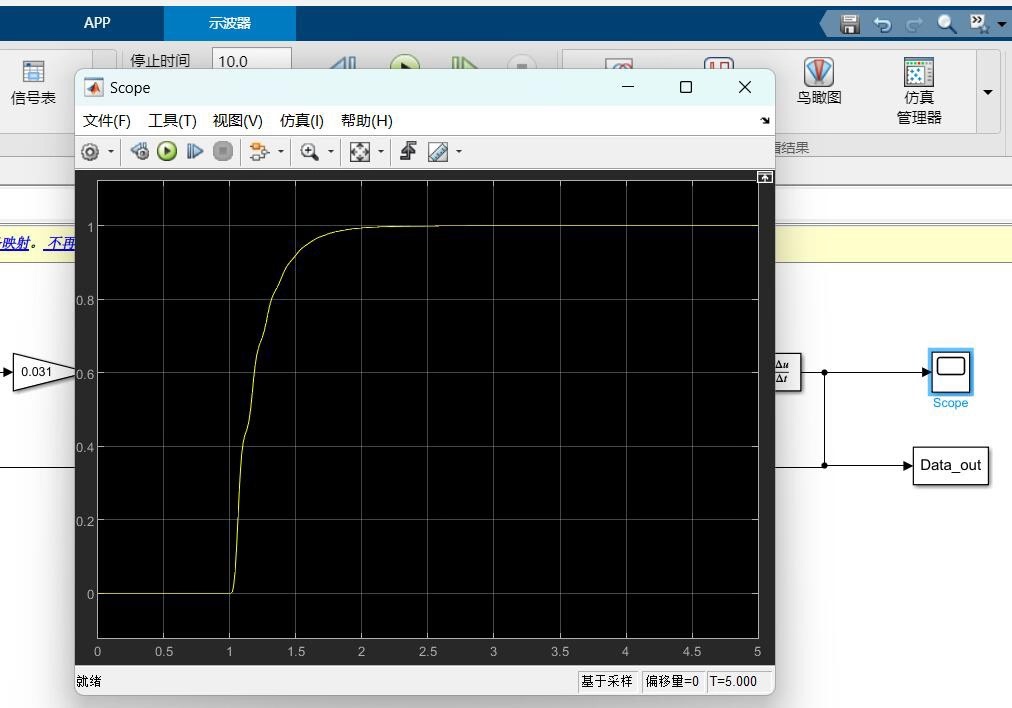
GA-PID,采用遗传算法优化PID参数,或者叫PID参数整定matlab代码PID和被控对象部分采用simulink搭建的最近在研究用遗传算法(GA)来优化PID控制器的参数,感觉还挺有意思的,来和大家分享一下😃。
基于深度强化学习的混合动力汽车能量管理策略1.利用DQN算法控制电池和发动机发电机组的功率分配2.状态量为需求功率和SOC,控制量为EGS功率3.奖励函数设置为等效油耗和SOC维持在当今追求环保与高效的时代,混合动力汽车的能量管理策略至关重要。深度强化学习为这一领域带来了新的解决方案,今天咱们就聊聊基于深度强化学习,利用DQN算法来控制混合动力汽车电池和发动机发电机组功率分配的能量管理策略。