- @2503_94160172
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
当模型开始训练时,损失曲线会经历三个有趣阶段:初始的剧烈波动像过山车、中期的稳定下降如滑梯、后期的细微调整仿佛钟表匠在调校齿轮。在代码中可以看到,每个粒子都在超参数空间里"飞行",dropout率和学习率就像调节旋钮,PSO通过群体协作找到最佳组合。锂电池的健康状态(SOH)就像人体的血压值,直接影响着设备的使用寿命。在NASA实验室里,四组编号B0005-B0008的电池数据正安静地躺在服务器里
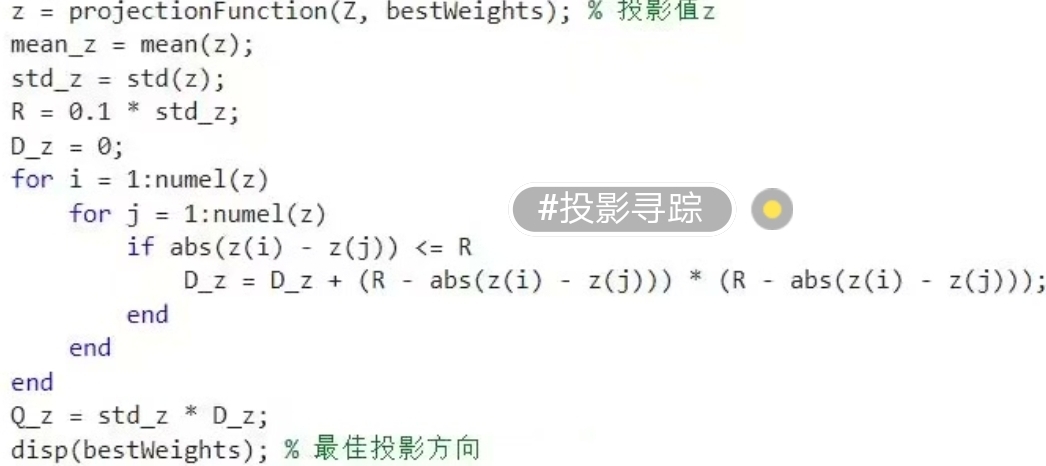
可视化环节绝对不能省。建议每20代把最优投影方向对应的散点图存下来,你会看到数据分布从一坨浆糊逐渐变成清晰的层次结构。突然想起读研时搞过的投影寻踪模型,这玩意儿算系统评分比传统方法骚气多了——特别是配上遗传算法,就像螺蛳粉里加炸蛋,味道直接升华。基于遗传算法(GA)的投影寻踪模型(Project Pursuit PP),可以计算不同系统评分值,MATLAB和Python都有。(代码跑不通时别急着骂
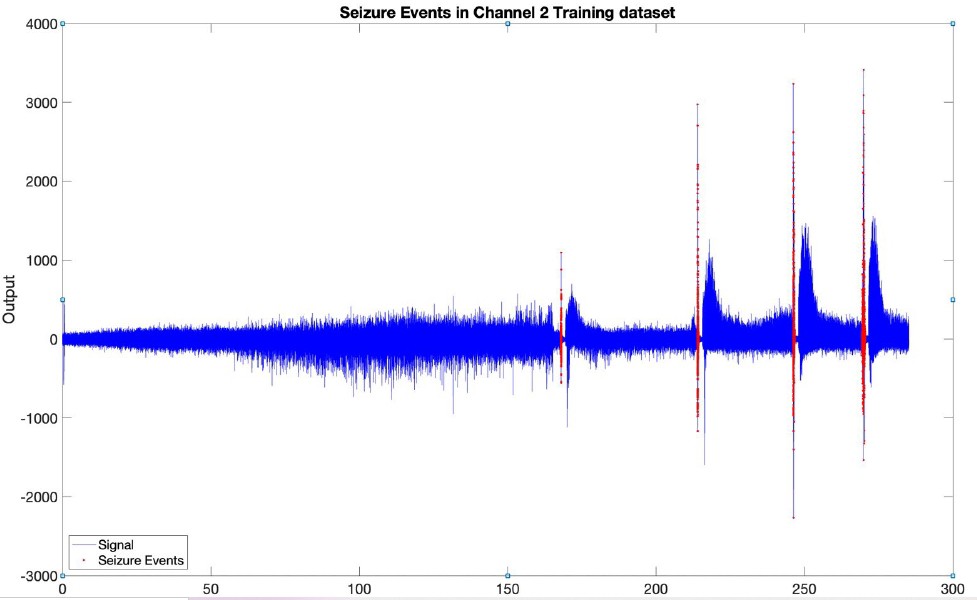
这里给大家提个醒哈,阅读作品简介很重要,因为不同编程语言实现起来思路和代码会有很大差别,咱这次是基于 MATLAB 的。而且建议有一定 Python 或 Matlab 基础的同学或工程师来研究这个代码,毕竟深度学习相关的东西,有一定基础上手会更快。它在处理时间序列数据方面那可是相当厉害,癫痫发作的数据往往带有时间序列的特性,所以 LSTM 就成了不二之选。运行这个检测程序有一定要求哈,需要 GPU
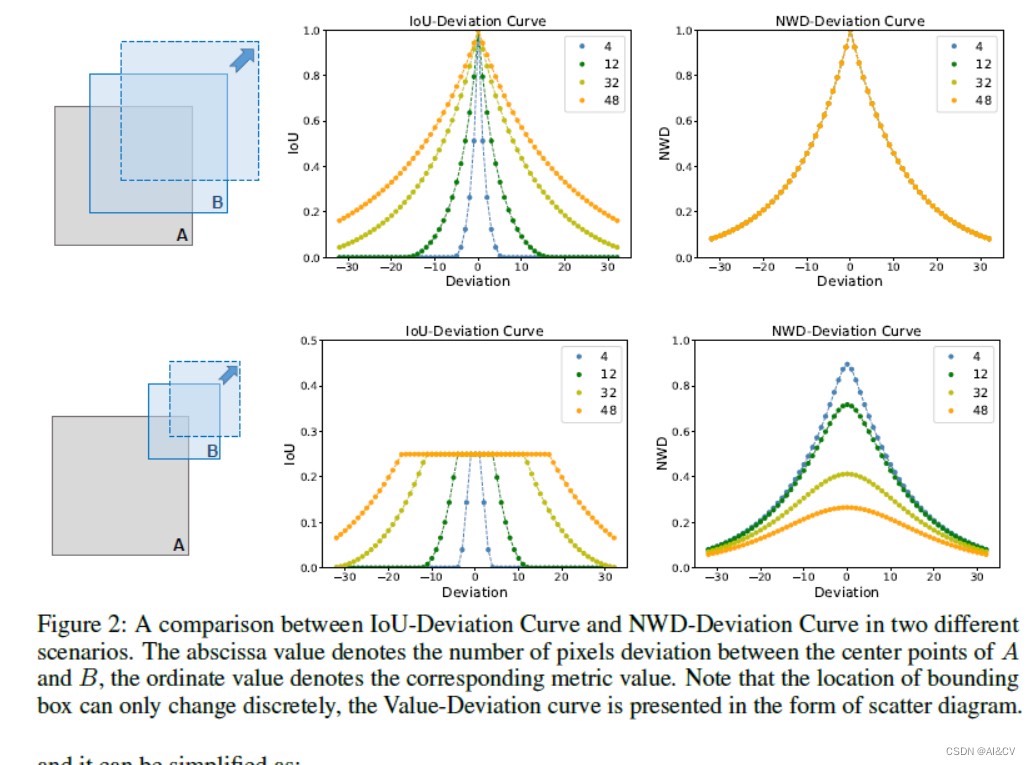
一种基于YOLOv8改进的高精度红外小目标检测算法 (自研)创新点:1)SPD-Conv特别是在处理低分辨率图像和小物体等更困难的任务时优势明显;2)引入Wasserstein Distance Loss提升小目标检测能力;3)YOLOv8中的Conv用cvpr2024中的DynamicConv代替;组合创新,可直接使用至其他小目标检测任务;实验结果:在红外小目标检测任务中mAP由原始的0.755
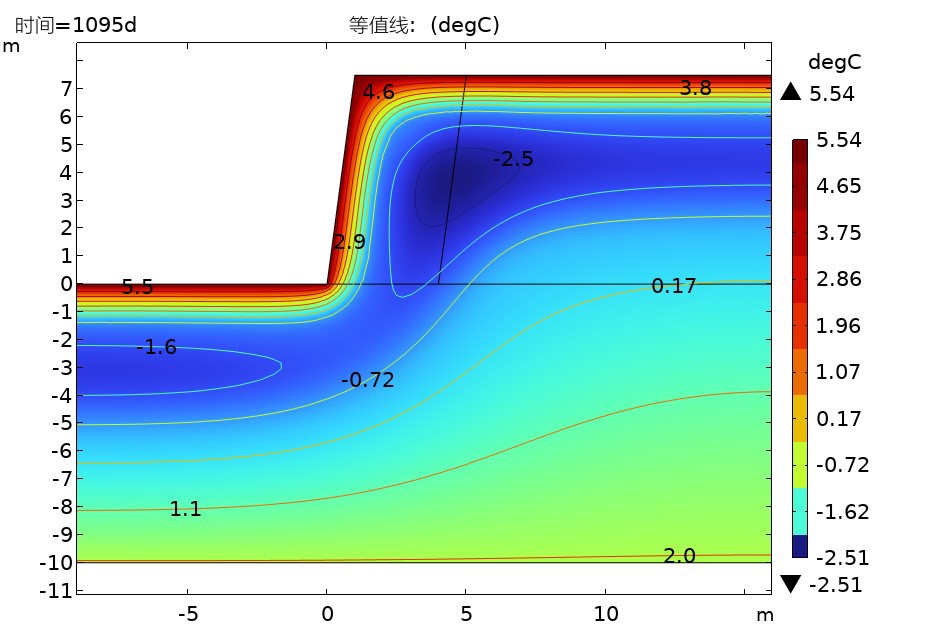
去年给青藏公路某段做数值仿真,甲方非要看路基在四季交替下的变形趋势,这不,直接在COMSOL里折腾了个水-热-力三场耦合模型。水分迁移用达西定律改版的方程,温度场要处理相变潜热,力学场直接吃前两个场的计算结果。实际跑仿真时发现,当温度在-1°C到1°C之间震荡时,热容值会突然飙到常规值的3倍,这就是相变潜热在作妖。前三个月用自动步长,后面改用定步长。本案例建立成二维模型,物理场采用两个PDE模块和
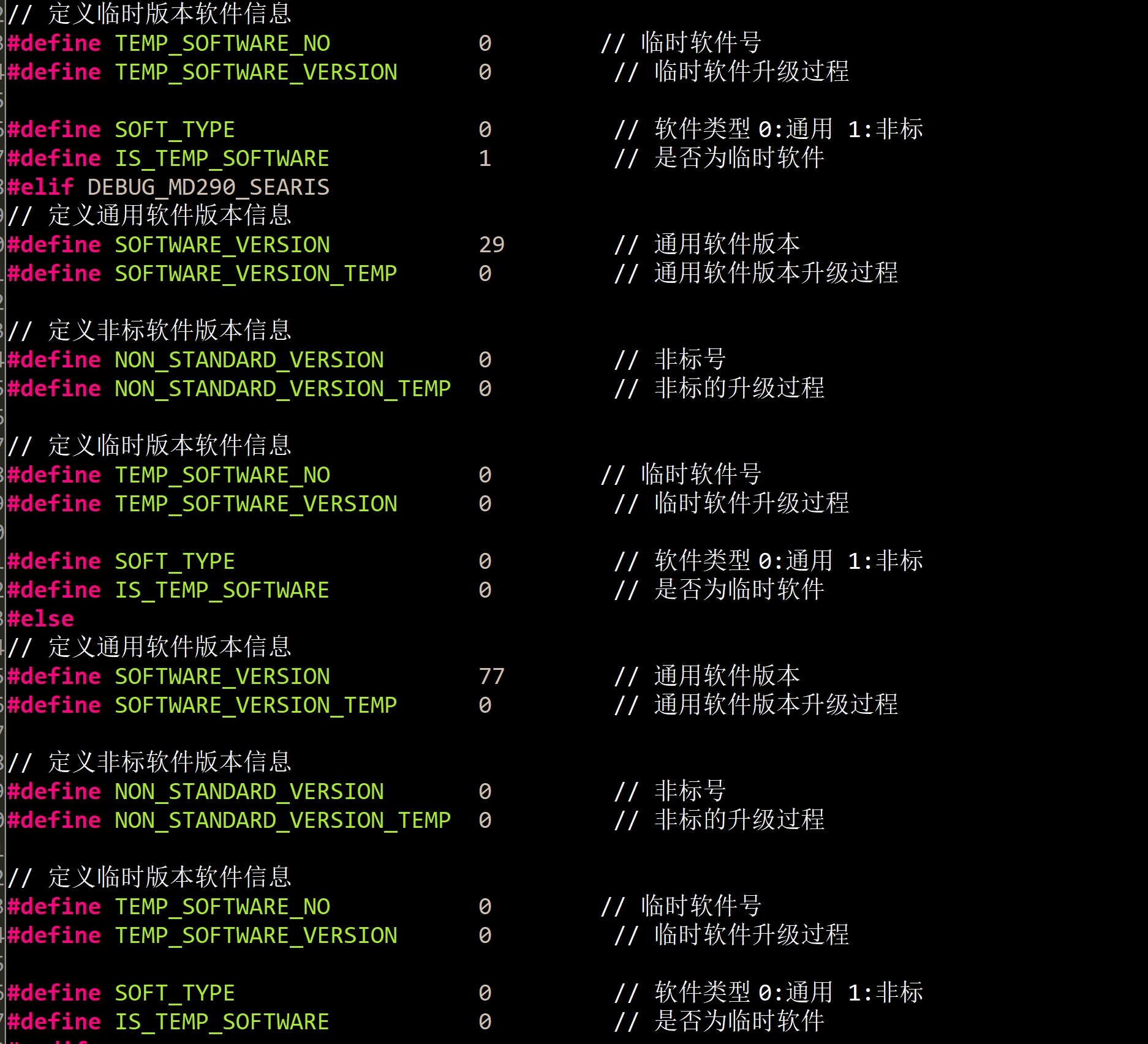
变频器 md500源码 MD500程序 全c 77版本svc3,低速转矩大,高速速度波动小。新的转子电阻、漏感辩识方法。全部内容均已测试过,可编译,功能完好只有源码最近拿到了变频器MD500的77版本源码,而且全是C语言编写的哦,迫不及待来和大家分享一下。
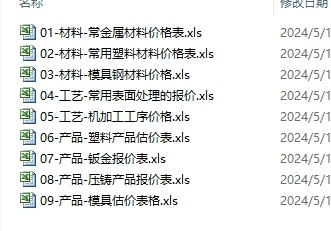
评论区喊"注塑牛逼"的,额外送钣金展开计算神器(带折弯系数自动补偿),铸造厂的熔炼成本对照表(从球铁到铝合金全覆盖),机加工件的工时测算模板(实测比市面ERP准30%)。需要重点说下第4张表的成型缺陷损失计算模块,这是多数人忽略的成本刺客。注塑成本计算和降本资料,内含注塑成本分析表,塑胶产品报价表,注塑成型周期及计算公式和各种塑料成本,有需求的朋友不要错过。注塑成本计算和降本资料,内含注塑成本分析
最后甩个暴论:别盲目追求算法复杂度,实测数据表明,在3C以上倍率放电时,90%的误差来自温度补偿没做好而不是算法本身。模型包里那个带温度补偿的EKF/UKF混合模型建议重点把玩,毕竟——锂电池的脾气,可比女朋友难懂多了。玩过BMS开发的都知道,SOC估算简直就是玄学现场——你以为电压稳如老狗,实际电量可能已经表演自由落体。今天咱们不整虚的,直接上硬菜,手撕几个实战模型。实测中发现,在SOC平台区(

这里给大家提个醒哈,阅读作品简介很重要,因为不同编程语言实现起来思路和代码会有很大差别,咱这次是基于 MATLAB 的。而且建议有一定 Python 或 Matlab 基础的同学或工程师来研究这个代码,毕竟深度学习相关的东西,有一定基础上手会更快。它在处理时间序列数据方面那可是相当厉害,癫痫发作的数据往往带有时间序列的特性,所以 LSTM 就成了不二之选。运行这个检测程序有一定要求哈,需要 GPU
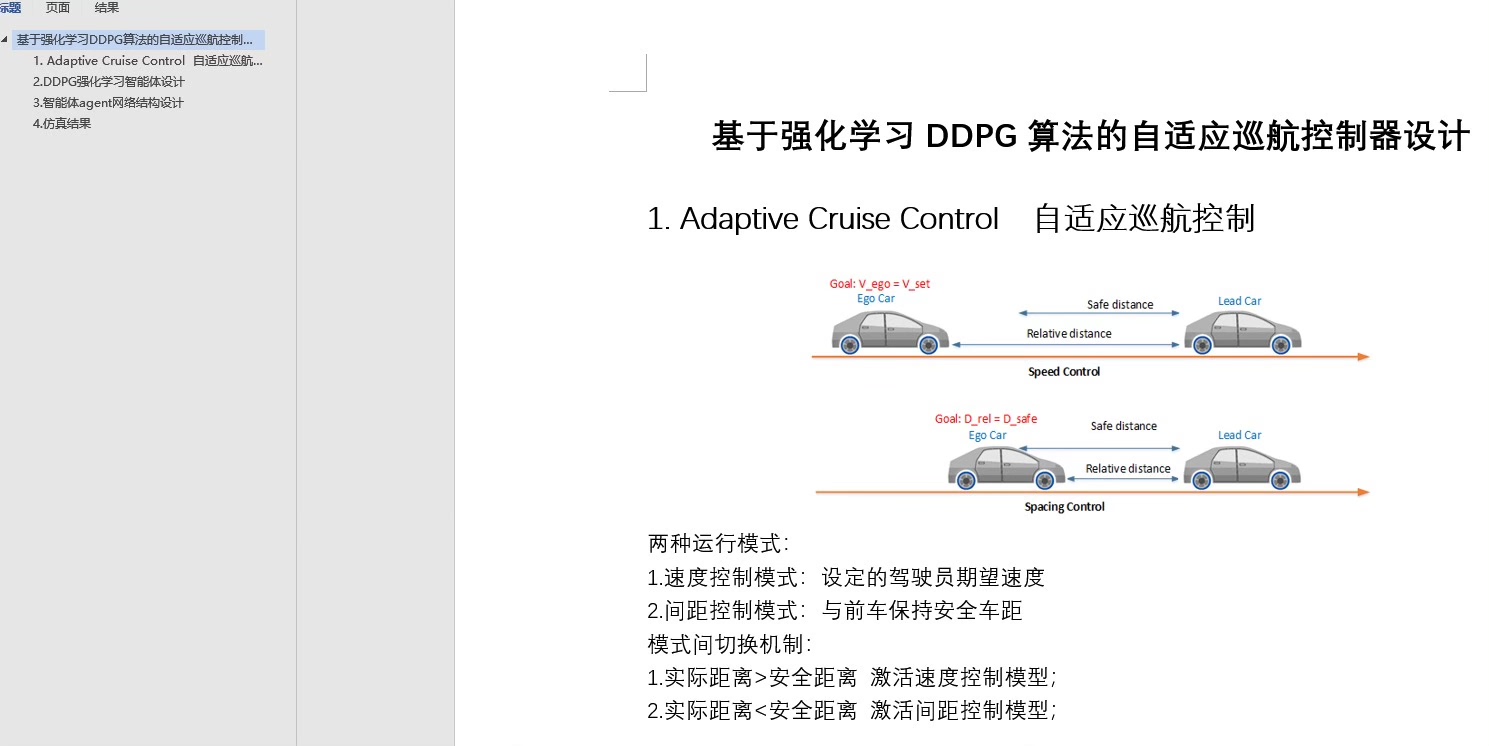
动作空间代表Agent可以采取的行动。对于ACC系统,自车的加速度就是我们的动作。代码分析:这里用函数定义了一个数值型的动作空间,大小为[1 1]也就是一维,下限为-2,上限为2,并给它起了个名字叫,这样在后续训练中,Agent输出的动作(加速度值)就会在这个范围内。