- @2503_93923387
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
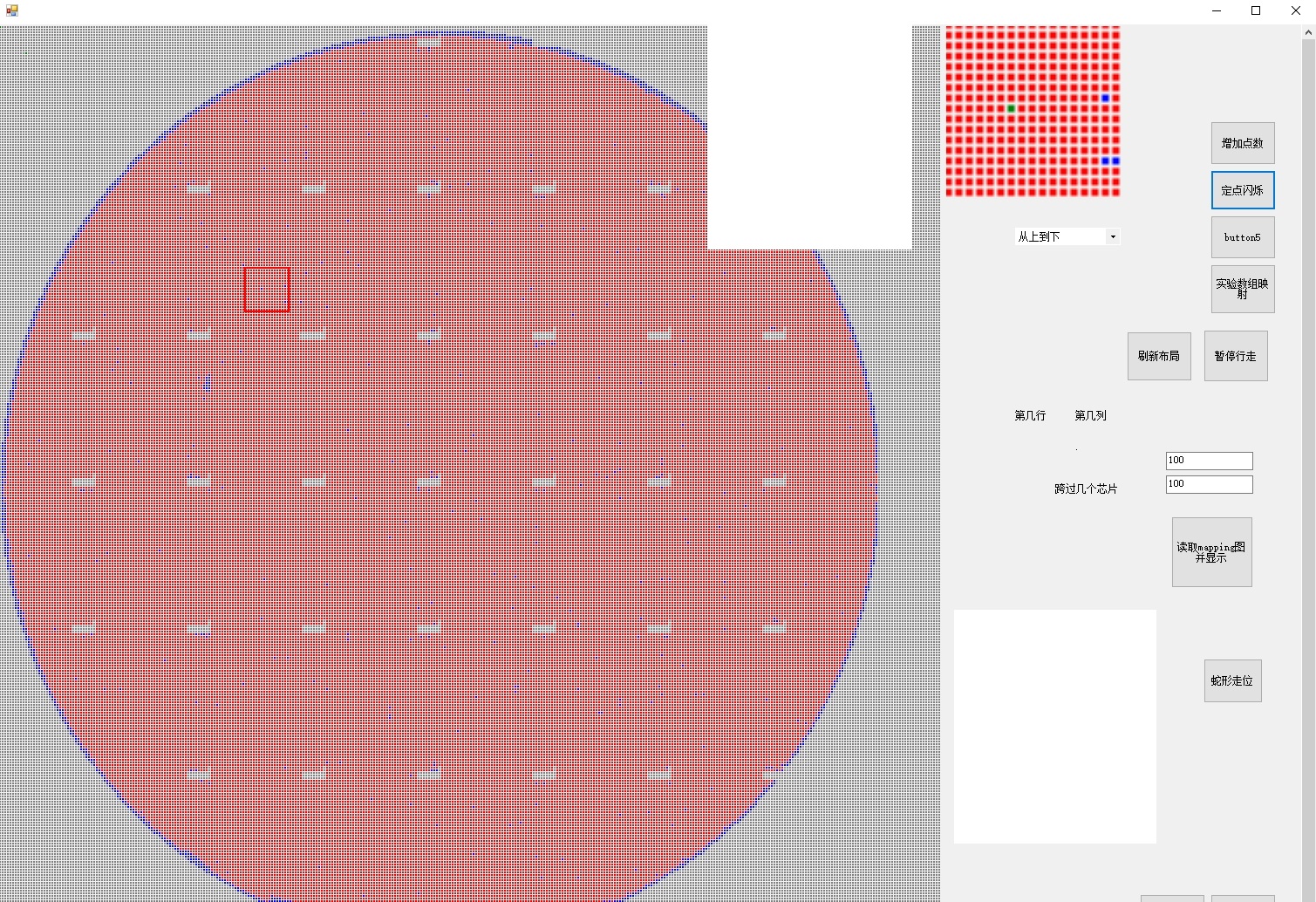
C#编写的一款读取xml文件的mapping图软件。可以自由定位位置,统计数量,蛇形走位。主要用在晶圆图谱识别。基于对原始代码的深入分析,这是一套完整的,主要用于半导体制造过程中的晶圆测试数据展示和分析。
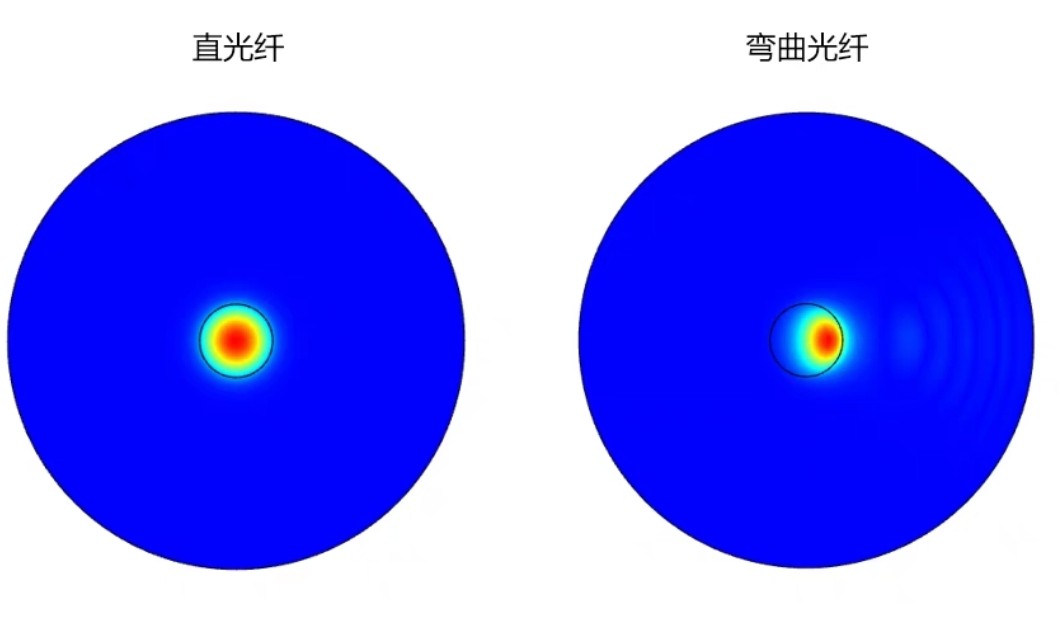
见过有人用自由四面体网格,结果算出来的损耗像心电图一样跳,换成边界层分布马上稳如老狗。记住,弯曲处至少铺3层网格,厚度按指数衰减分布,这样既能抓准场分布又不会让内存爆炸。有个骚操作:把PML做成渐变环形,半径设为1.5倍波导半径,吸收效果立竿见影。折腾完这些,当看到损耗曲线随弯曲半径平滑下降时,那感觉就像秋名山车神完美过弯——虽然弯道越急挑战越大,但精确控制带来的成就感绝对值回票价。注意那个rad
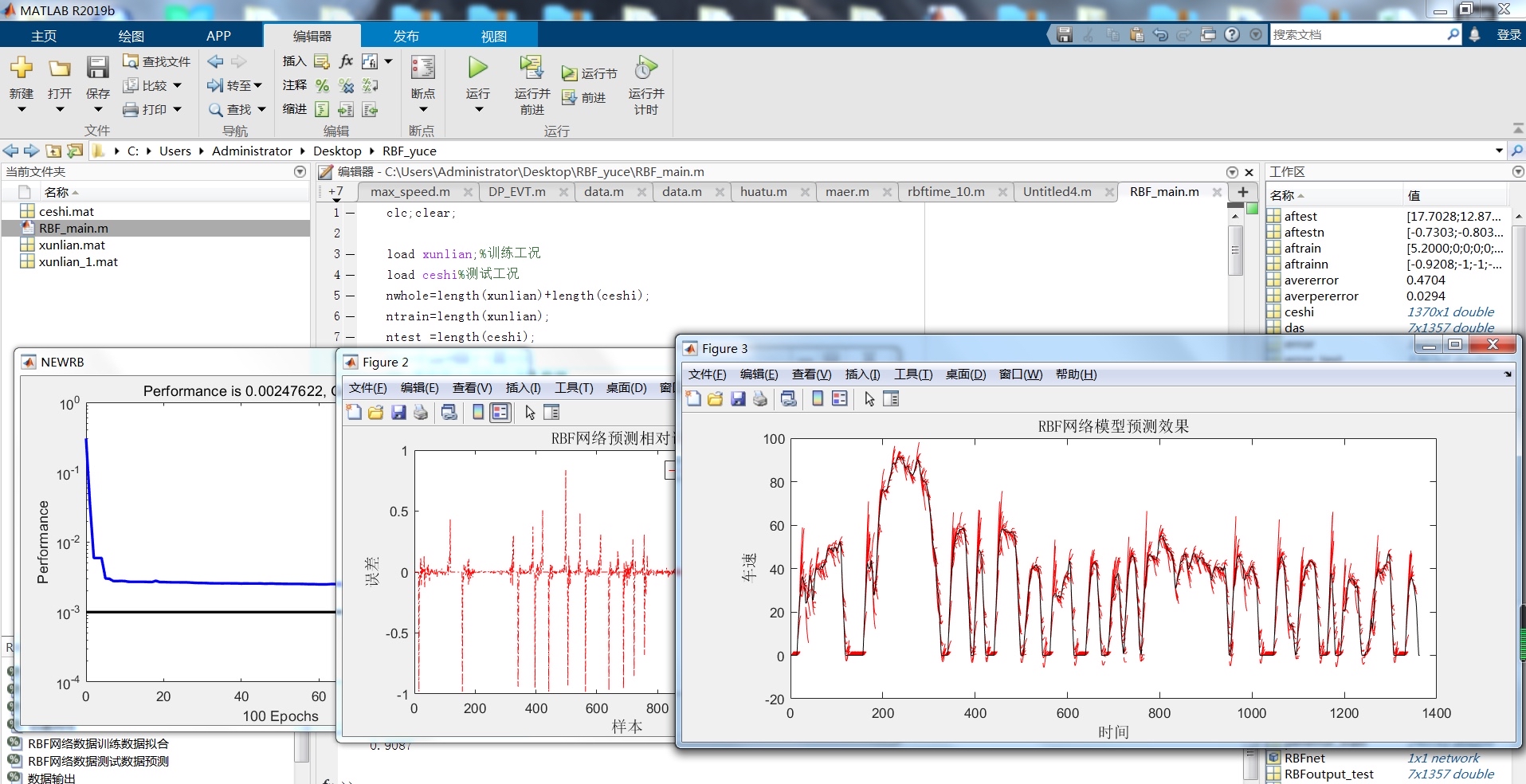
本项目实现了一个基于径向基函数(Radial Basis Function, RBF)神经网络的车速时序预测系统,旨在利用历史车速数据对未来若干秒内的车速进行高精度预测。该模型特别适用于智能交通、自动驾驶能量管理、车辆控制策略优化等场景,其中对未来行驶状态的准确预判是提升系统性能的关键前提。整个系统以 MATLAB 为开发平台,采用模块化设计思路,依次完成数据准备、归一化处理、RBF 网络构建与训
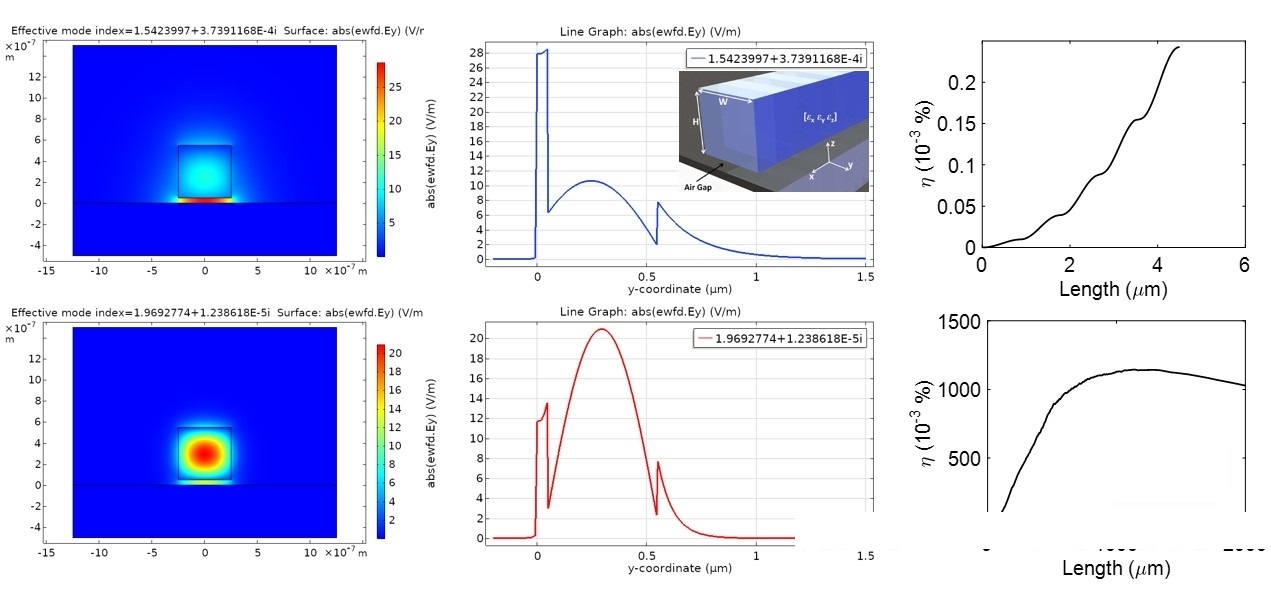
PPLN(周期性极化铌酸锂)波导在非线性光学领域有着重要的应用。倍频效率转换就是将输入光的频率加倍,在这个过程中,基频光的能量部分转化为倍频光的能量。而大信号模型则考虑了基频光和倍频光在相互作用过程中的能量变化,相较于小信号模型,它能更准确地描述高功率输入情况下的倍频过程。通过Comsol和Matlab的联合计算,我们可以更准确地模拟PPLN铌酸锂波导的倍频效率转换过程,尤其是使用大信号模型能够考
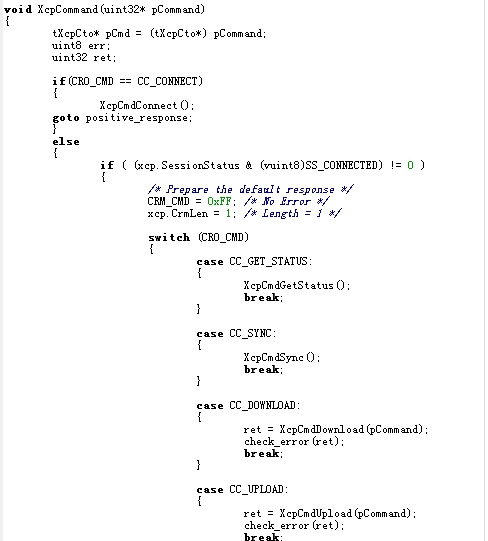
索性把自己在S32K144上实现的XCP工程开源了,这个版本支持CAN通信,实测通过CANape连接稳定,标定参数刷新速度能到2ms周期。代码里随处可见防御性编程的痕迹,比如每个API都做了指针有效性检查,连除零保护这种细节都没放过。工程里还埋了个彩蛋:在xcp_can.c第420行有个隐藏的调试模式,连续收到三次0x666指令后会激活原始数据日志功能。基于s32k144开发的xcp标定协议,完整
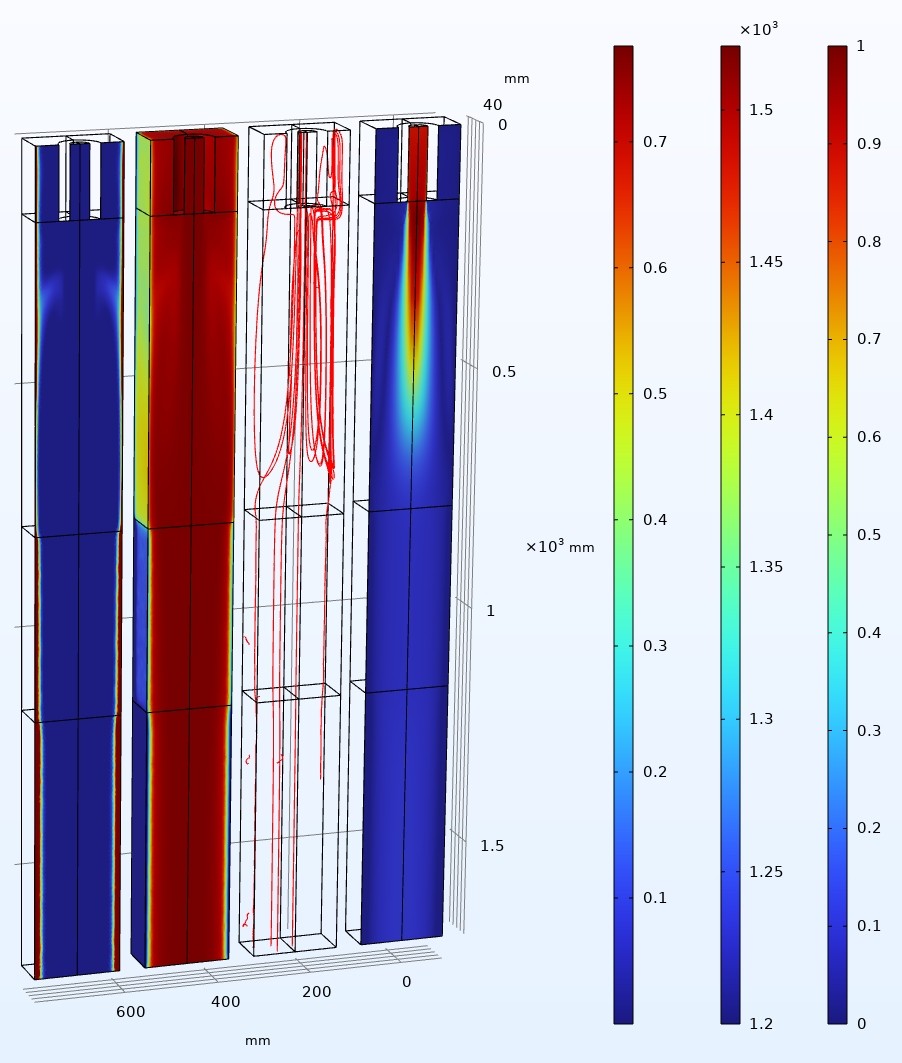
在钢铁厂连铸车间里,红热的钢水顺着结晶器流淌时,操作工最想知道的是:这会儿坯壳到底长多厚了?后来改用相场变量梯度最大值定位法,用comsol的d(fs,x)^2 + d(fs,y)^2求极值点,界面追踪稳如老狗。某次仿真发现凝固界面出现波浪形缺陷,追查代码发现beta值多输了个零——热膨胀搞成十倍,钢水都快沸腾了。所以说数值模拟这活,既考验物理功底,又得防着代码里的"暗坑"。相场法模拟枝晶生长时,
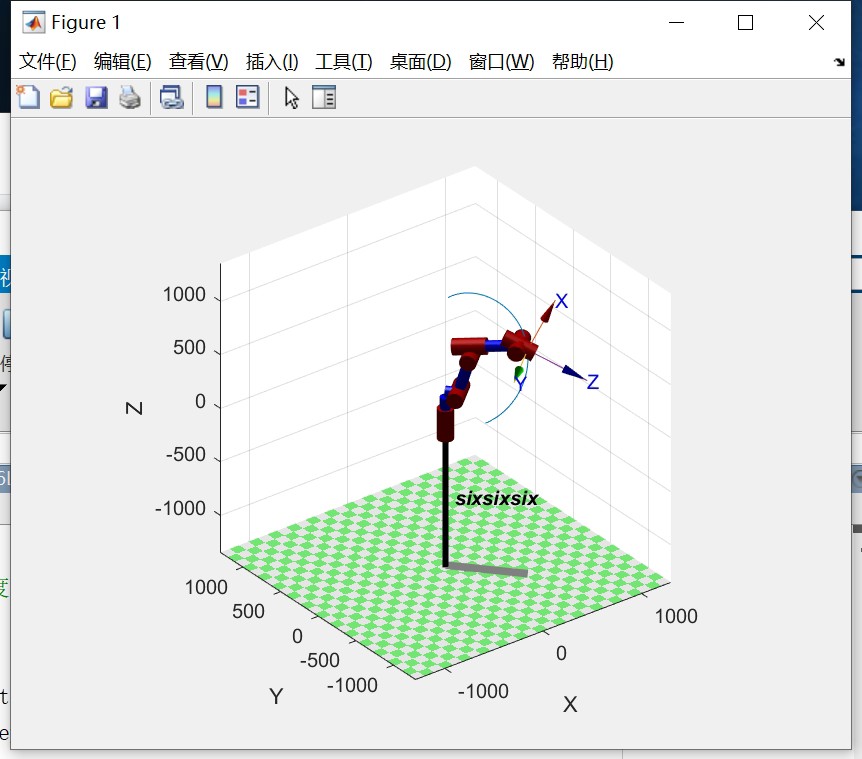
3 - RPS 机构由三个 RPS 支链组成,R 代表转动副(Revolute joint),P 代表移动副(Prismatic joint),S 代表球面副(Spherical joint)。这种结构使得机器人在空间中具备多个自由度的运动能力,广泛应用于诸如精密定位、飞行模拟等领域。
在三菱的系统中,凸轮曲线的计算通常是通过一个专门的软件工具完成的。总的来说,三菱的旋切飞剪控制虽然复杂,但通过合理的凸轮曲线设计和精确的代码控制,可以实现非常高的切割精度。比如,飞剪在切割过程中需要保持恒定的线速度,这就需要根据材料的进给速度动态调整凸轮曲线的参数。在三菱的编程环境中,凸轮曲线的控制通常是通过G代码来实现的。通过暂停和调整进给速度,可以更好地控制飞剪的运动,确保切割的精度。三菱旋切

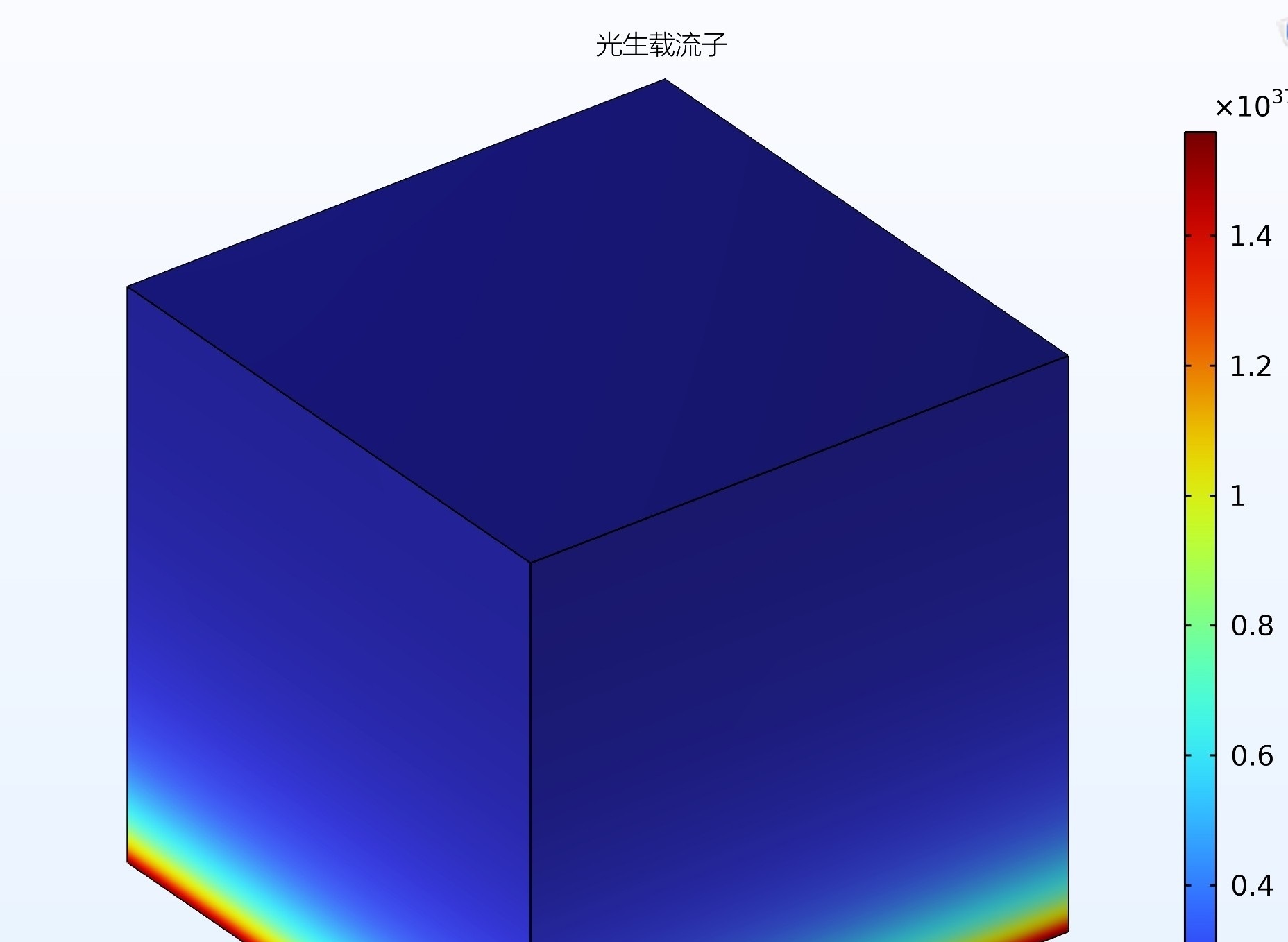
拿短路电流密度说事,实测值42mA/cm²,仿真能怼到39.8,误差控制在5%以内算达标。今天咱们拆解硅太阳能电池里光生载流子的完整计算流程,特别是波动光学和半导体物理的耦合骚操作。先甩个结论:想精准预测电池效率,光路传播模式和载流子迁移必须联动计算,单搞一个模块准翻车。建议用层堆叠结构:顶部200nm的N型层,下方10μm的P型层,中间夹个20nm的本征层(玩过HIT电池的都懂这个套路)。遇到过
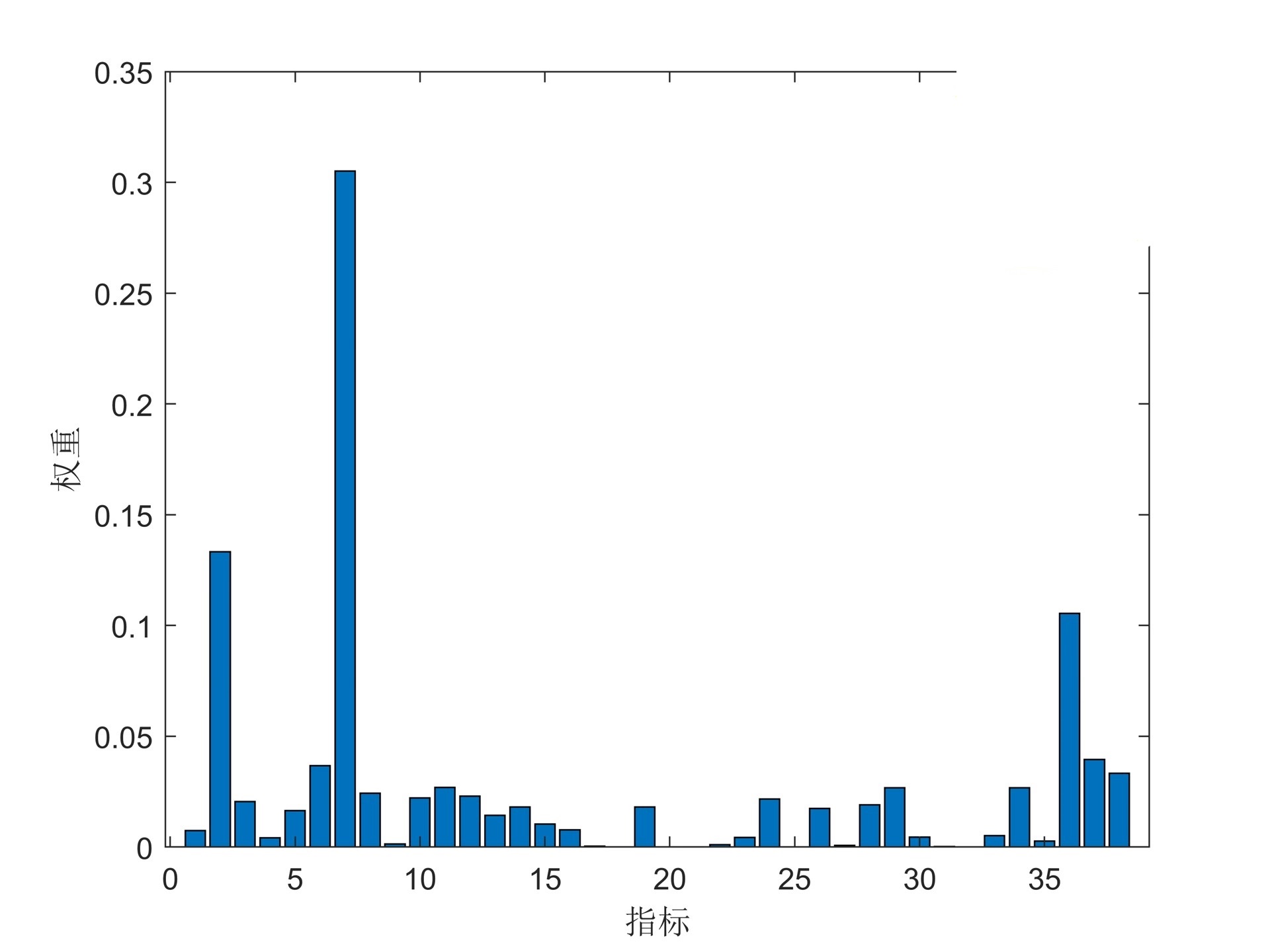
critic法计算指标权重根据指标数据(每行是一个样本,每列是不同变量)计算各个指标的权重值并画图展示MATLAB代码,备注清晰,易于使用在数据分析的世界里,确定不同指标的权重是一项关键任务。今天咱们来聊聊用Critic法计算指标权重,并且用MATLAB实现这个过程,最后还把结果画成图展示出来。