- @2501_92685241
简介
专注C#/.NET原生开发,深耕图像处理与算法优化领域,坚持手写实现核心算法,拒绝过度依赖第三方库。 喜欢拆解底层原理,用通俗易懂的方式分享技术细节,致力于打造高质量的技术内容。
擅长的技术栈
可提供的服务
C#/.NET 全栈开发、图像处理算法实现、底层原理讲解、算法性能优化、技术博客内容定制
针对政企项目禁用加密第三方库、国密等保改造需求,本文拆解国标 GB/T 32907-2016 SM4 对称分组加密算法,梳理发展历程、Feistel 迭代结构、S 盒置换、密钥扩展等核心原理,讲解 ECB、CBC 加解密完整流程,完成算法性能与安全强度分析。提供无任何外部依赖的原生 C# 完整代码,内置 PKCS7 填充、分组运算与测试用例。文中剖析 SM4 优缺点,划分政务、金融、物联网等适用场

本文详解 SHA-224 哈希算法,梳理概念、历史、底层原理与完整执行流程,附带性能分析、优缺点及落地场景。区别于直接调用加密 API,提供零第三方依赖纯原生 C# 完整手写代码,完整复刻填充、消息扩展、64 轮压缩底层逻辑,可直接编译运行。SHA-224 是 SHA-2 轻量化变体,输出 224 位摘要,安全且算力开销低,适配物联网、接口验签、文件校验等资源受限场景。文章对比同系列哈希差异,区分
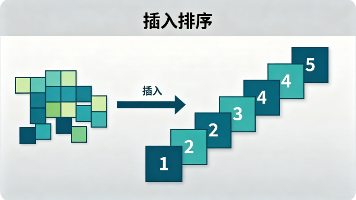
插入排序是一种简单高效的稳定排序算法,时间复杂度为O(n²),但在处理接近有序数据时性能接近O(n)。其核心思想是逐个选取元素并插入到有序区的正确位置,通过后移元素腾出空间,减少无效操作。算法实现简洁直观,仅需常数级额外空间,适合小规模数据(如n<1000)和部分有序场景。虽然大数据量性能不如快速排序等算法,但其稳定性和自适应特性使其成为基础排序算法中最实用的选择之一,也是算法学习的重要基础