- @2500_94317971
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
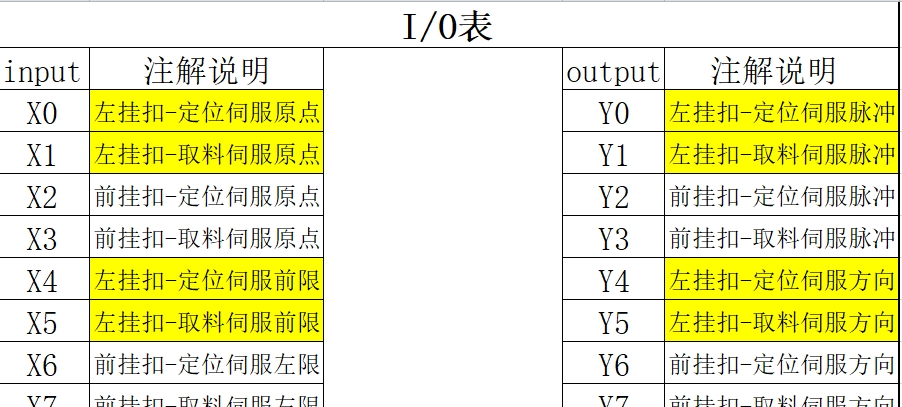
这种封装方式比梯形图清爽多了,特别是在需要重复调用四轴的时候,直接实例化四个FB块互不干扰。先看整体架构:FX5u-32MT做主站,四个MR-JE-C伺服带1kg级水平关节机械手,HMI用维纶通MT8071iE。在运动到当前点的同时,提前计算下三个点的速度变化率,避免急停抖动。宝贝包括FX5u程序,维纶通触摸屏程序,IO表,元件BOM,eplan和PDF电气图,整机机构图,真实项目程序。宝贝包括F
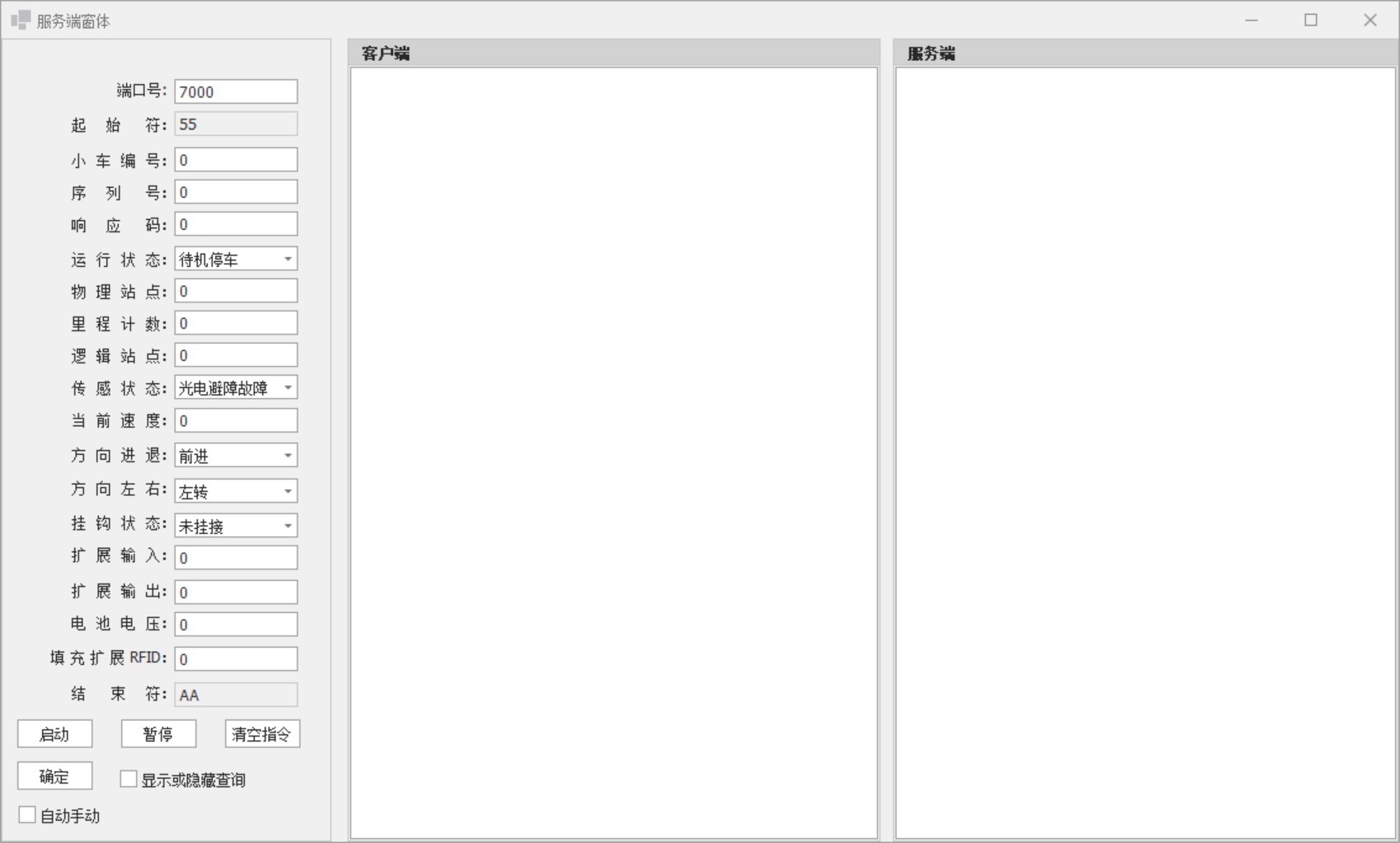
不过要注意_taskQueue.GetOldestValidTask方法的线程安全性,看源码发现他们用了ConcurrentPriorityQueue做底层数据结构,这个选择很合理。整体来说,作为学习材料比很多纸上谈兵的教程实用多了,配合附带的数据库设计文档,能帮新人快速理解AGV调度系统的核心逻辑。如果是计费类日志可能得用同步写入,但调度系统对日志的实时一致性要求不高,这个设计是合理的。这个AG
这里的n_estimators控制树的数量,实测超过100棵后提升有限。随机森林的魔法在于双重随机性——随机选取样本(bootstrap)和随机选择特征,这种设计让模型兼具多样性和鲁棒性。这三个算法构成了机器学习的基础武器库,掌握它们就拿到了打开分类世界的钥匙。机器学习中有三个经典算法经常被拿来比较:决策树、随机森林和KNN分类器。今天咱们用Python的sklearn库,边撸代码边聊它们的实战技

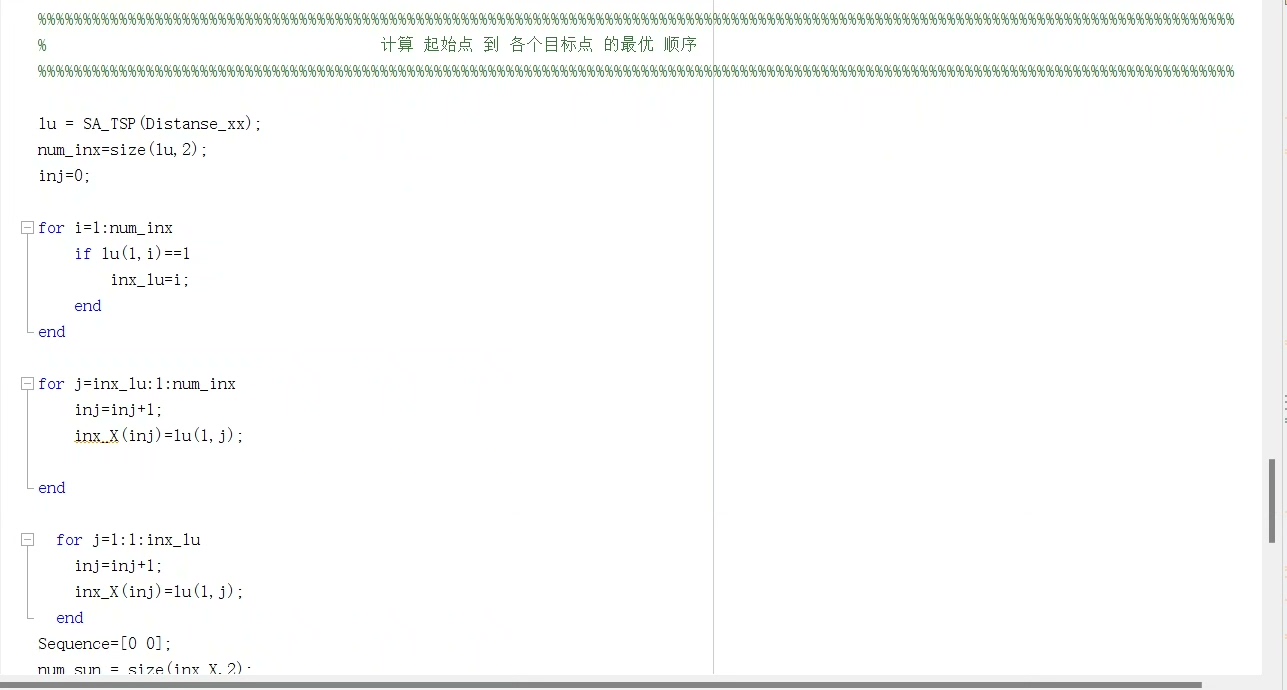
实测在20个送餐点的场景下,这种组合算法比纯贪心策略节省18%的路径长度。有个取巧的办法是把新点插入到当前最优路径中成本最低的位置,这比重新计算整个方案快得多。这个问题让无数机器人程序猿秃了头,直到他们发现用A*算法和模拟退火搞组合技有奇效。2,采用A*算法规划两点间的距离,然后依据规划路径距离模拟退火算法运算全过程最短距离。2,采用A*算法规划两点间的距离,然后依据规划路径距离模拟退火算法运算全
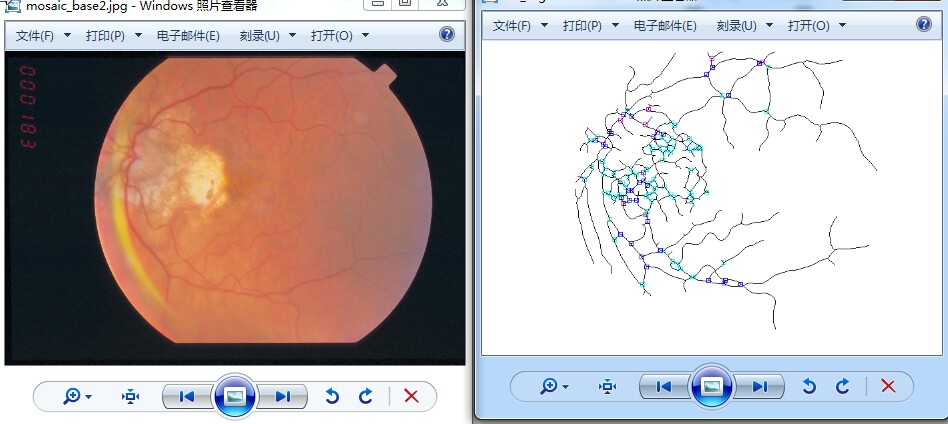
这套组合拳的核心在于CLAHE(限制对比度自适应直方图均衡),它能像夜视仪一样把藏在暗处的血管纹理拽出来。医学影像科的操作台上,医生们每天都在玩一种高级"抠图"——把血管、肿瘤或者脑组织从CT、MRI的灰度图中精准剥离。这种技术就像给图像装上了智能剪刀,比如从视网膜照片里抽出蜘蛛网般的血管,或是在脑部扫描中单独拎出白质区域。这模块就像个情报中转站,把底层的高清细节(比如血管边缘)和高层的语义信息(
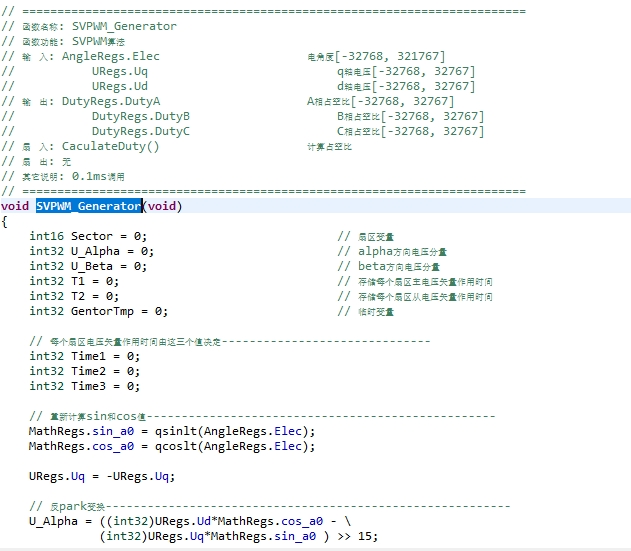
/ 系统初始化// 电机控制任务// 故障处理// 电源管理#endif从头文件可以看出,整个代码模块划分清晰,功能分区明确,体现了良好的代码架构设计。通常车企的代码会比较保守,但这个代码却让人眼前一亮,完全没有老派汽车代码的臃肿感。优秀代码不仅是功能实现,更是设计理念的体现车企代码也在不断进化,向着更现代化的方向发展好的代码架构是系统稳定运行的基础这对于从事汽车电子开发的朋友来说,是一个值得深入
这种封装方式比梯形图清爽多了,特别是在需要重复调用四轴的时候,直接实例化四个FB块互不干扰。先看整体架构:FX5u-32MT做主站,四个MR-JE-C伺服带1kg级水平关节机械手,HMI用维纶通MT8071iE。在运动到当前点的同时,提前计算下三个点的速度变化率,避免急停抖动。宝贝包括FX5u程序,维纶通触摸屏程序,IO表,元件BOM,eplan和PDF电气图,整机机构图,真实项目程序。宝贝包括F
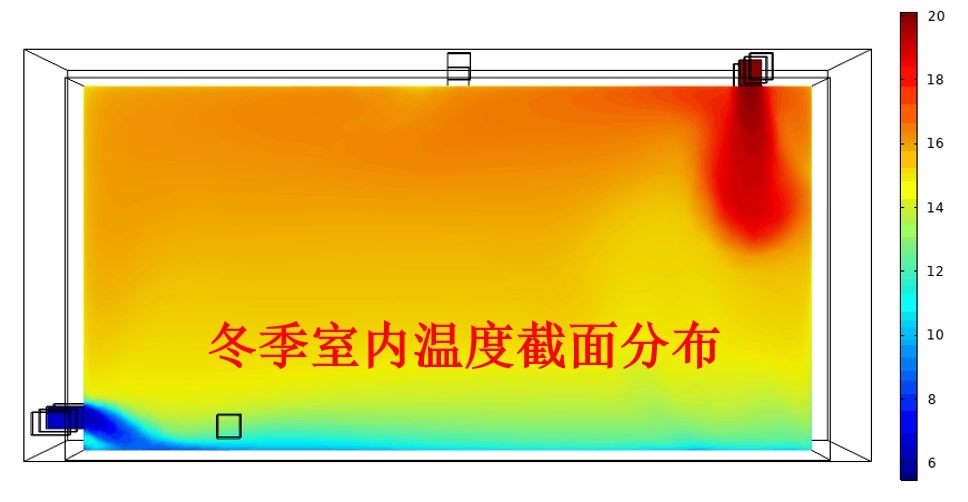
仿真这玩意儿,本质上是用数学暴力破解物理规律。COMSOL结果再漂亮,也得拿着红外测温仪去现场校准。上次有个仿真显示西晒墙温度差3℃,实测发现是玻璃幕墙的镀膜参数填错了... 所以啊,代码能仿真相,但仿不了人心。
不过要注意_taskQueue.GetOldestValidTask方法的线程安全性,看源码发现他们用了ConcurrentPriorityQueue做底层数据结构,这个选择很合理。整体来说,作为学习材料比很多纸上谈兵的教程实用多了,配合附带的数据库设计文档,能帮新人快速理解AGV调度系统的核心逻辑。如果是计费类日志可能得用同步写入,但调度系统对日志的实时一致性要求不高,这个设计是合理的。这个AG
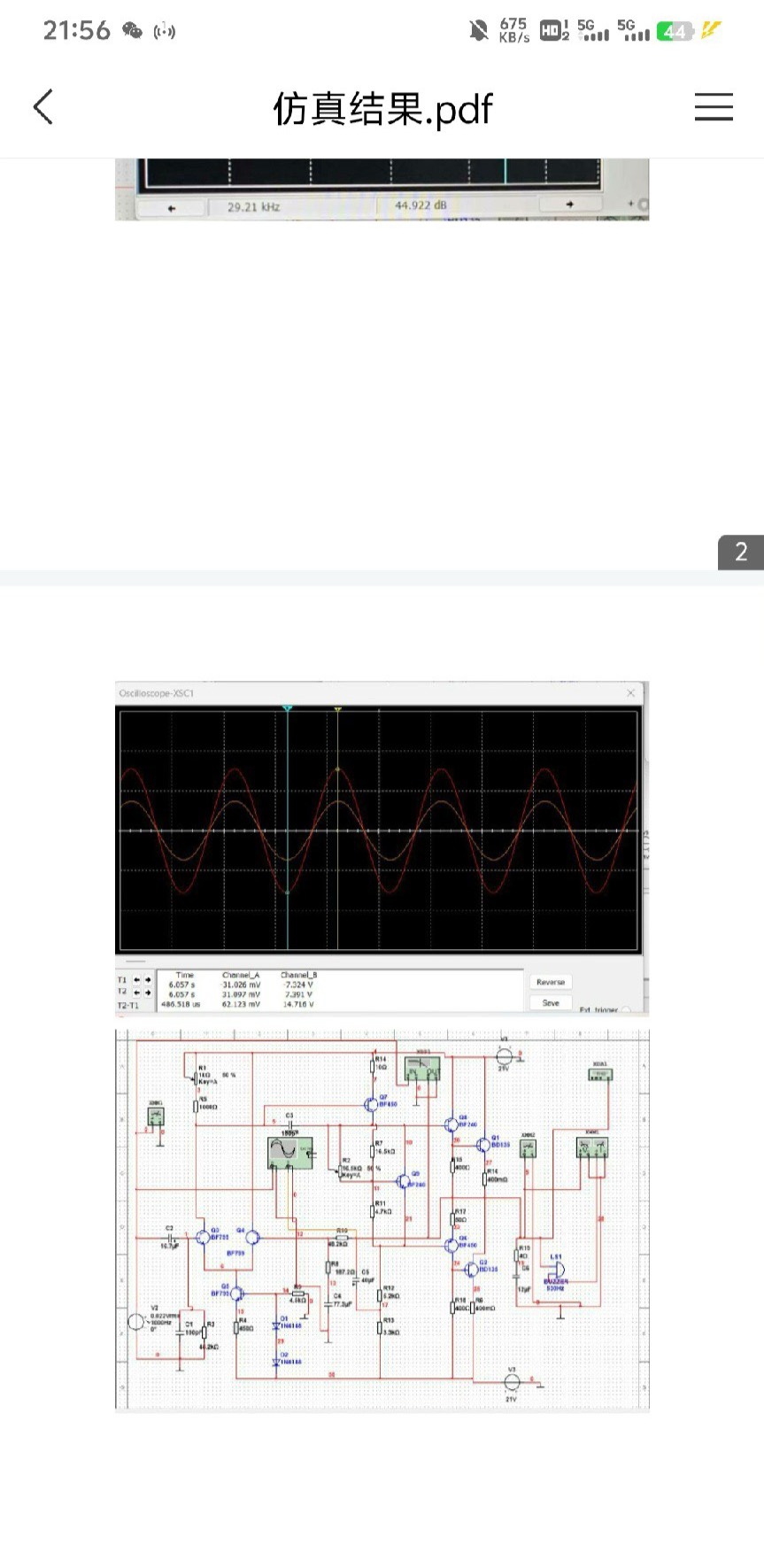
拆开音响设备总能看到密密麻麻的电路板,今天咱们来聊聊其中最关键的部分——音频功率放大器的设计实战。最近刚做完一个输出功率20W的功放方案,实测总谐波失真(THD)控制在0.05%以下,这就把设计过程中的干货掏出来分享。最后分享个调试秘籍:用手机充电器做临时电源时,在整流桥后并接4700μF电解电容,再用TL431做个简易稳压,这样既能避免开关电源干扰,又能省下买线性电源的钱。这个算法考虑了电源电压