- @2500_94292699
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
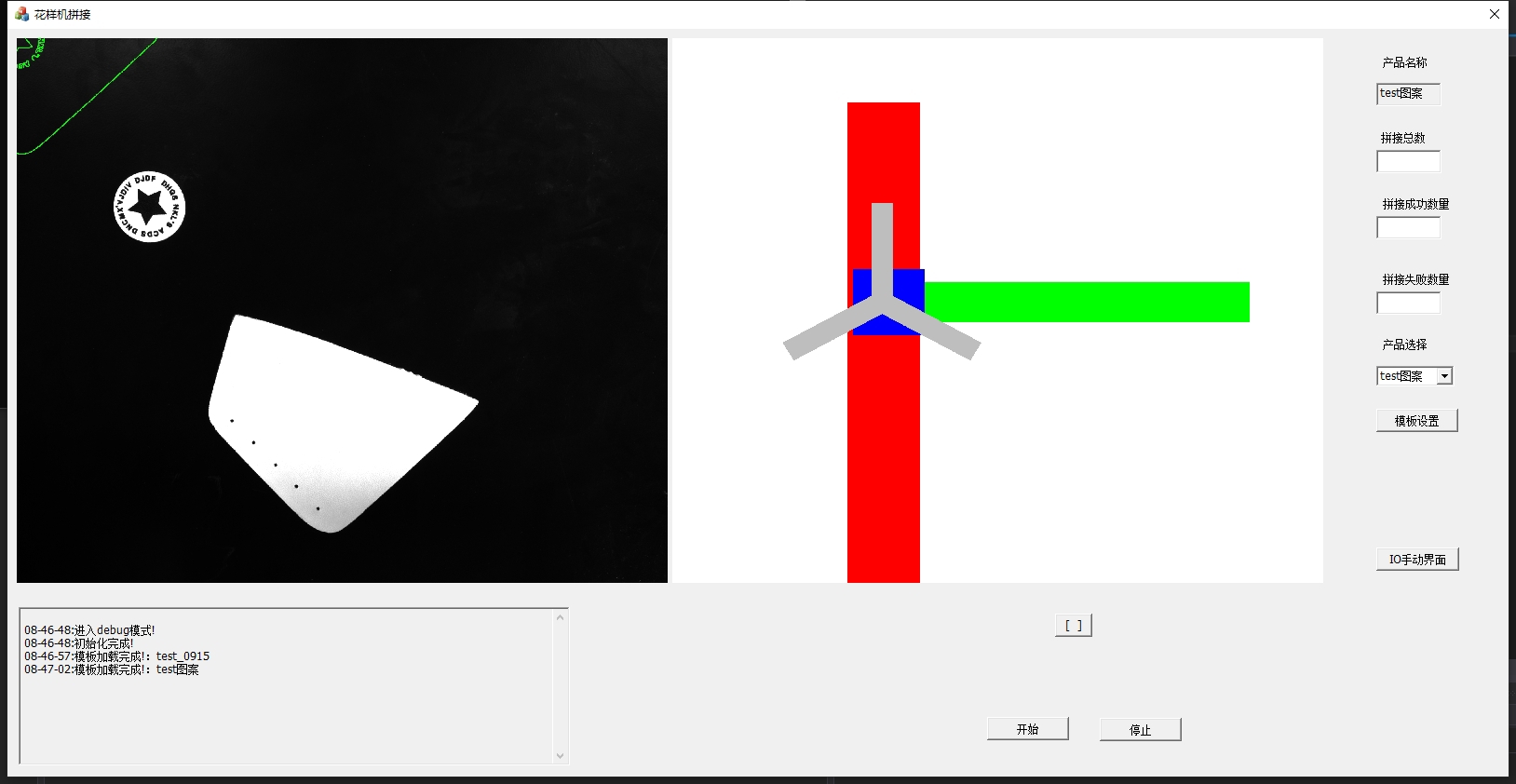
特别要提的是手眼标定模块,我们用Halcon实现了一套九点标定法,这个环节直接关系到抓取的成败。不过要提醒的是,千万别在未隔离的车间用WiFi传输图像——我们吃过电磁干扰导致坐标跳变的亏。四轴抓取视觉旋转标定源代码,基于VS2015 C++ 实现,仿雅马哈四轴机械手抓取程序,实现把两个任意摆放的物料通过视觉算法和运动控制指令定位摆放到指定的位置并拼接起来。使用研华控制卡搭配工业相机实现,图像算法使
然而,官方文档分散、字节序规则晦涩、异常场景繁多,使得“让PLC连上网”往往成为项目初期的“卡脖子”环节。下文将逐层拆解其设计要点、扩展技巧与踩坑警示,但出于知识产权与代码最小化原则,仅展示必要片段与思路,具体实现请读者参考原始工程自行研读。通过和PLC用网络连接,可以读取写入欧姆龙PLC的数据寄存器DM(批量也可以)、输入输出CIO、辅助继电器WR,H保持继电器等。至此,欧姆龙PLC的以太网通信

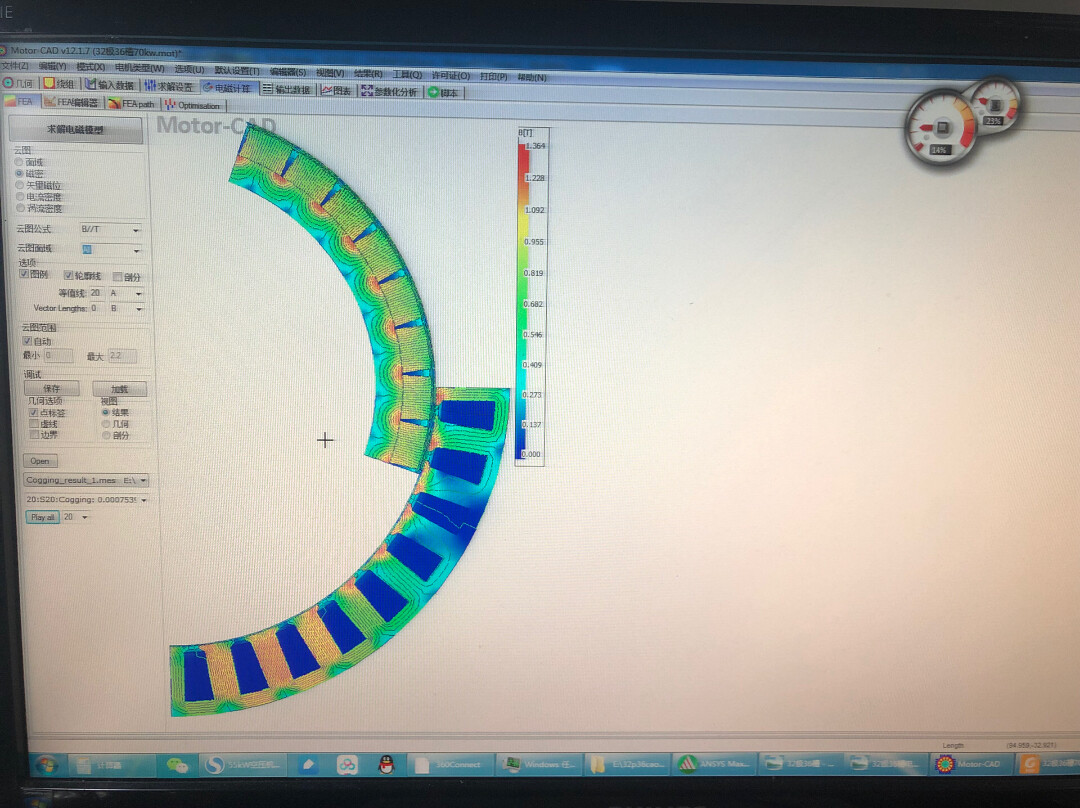
32极配36槽的组合乍看有点反常识,但仔细算下极距:36槽/(32极/2)=2.25,典型的分数槽配置。今天咱们拆解个实战案例——32极36槽内转子永磁同步电机,70kW输出还能飙到525转每分钟,这货可是把功率密度和过载能力都点满了。这个5槽跨距可不是随便定的,用傅里叶分解看磁势谐波,5槽跨距能把5次谐波削掉80%。说到电磁负荷,这电机的线负荷A值敢飙到72A/mm,电流密度J值控制在8.5A/
这个案例还提供了 PLC 程序(带注释)、触摸屏程序、机器人程序、电气原理图、部分设备图片视频及本案例的程序分析。本案例是汽车部件自动切断机,采用三菱FX-3U PLC,雅马哈机器人,雅马哈伺服,松下伺服,视觉系统,Proface触摸屏。本案例是汽车部件自动切断机,采用三菱FX-3U PLC,雅马哈机器人,雅马哈伺服,松下伺服,视觉系统,Proface触摸屏。本案例提供PLC程序(带注释)、触摸屏

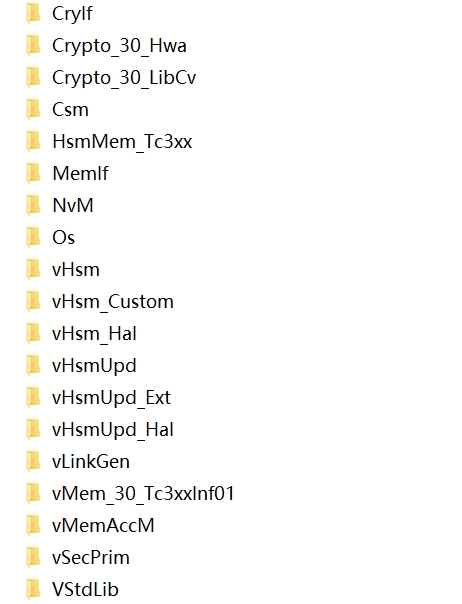
首先,这款芯片支持的算法还挺全的,像RSA、AES这些常见的加密算法都支持,还能做签名生成和验证,CMAC生成和验证等等。SecureBoot主要是确保系统启动时加载的固件是可信的,防止恶意代码在启动时被加载。HsmBootloader则是HSM芯片的专用引导程序,确保HSM芯片在启动时加载的固件是安全的。总的来说,英飞凌的HSM芯片在汽车电子网络安全方面表现非常不错,支持的算法和功能都很全面。如
先看硬件配置,APT32F1023这颗国产MCU真香——72MHz主频带硬件乘除法器,6路PWM互补输出自带死区控制,关键是有个16位高精度ADC。这套方案跑起来后,实测效率比之前用的STM32方案高了3%,看来APT32F1023的PWM死区控制确实精准。最后提醒下PCB布局:高压部分和信号地要分区域布局,MOS驱动信号走线尽量等长,软件上做好过流保护,别问我怎么知道的(烟雾报警器响了两次...
从开源社区的反馈来看,已经有团队在这套基础上实现了双电机同步控制,效果相当炸裂。AT32这次放出来的全开源方案直接把门槛拉低——基于Cortex-M4内核的AT32F413主控,自带硬件除法器和FPU,跑起磁链观测器算法那叫一个丝滑。现场实测视频里能看到,带载启动时转子没有丝毫抖动,直接平滑进入同步状态。这种条件抗饱和法比单纯的积分限幅更智能,特别是在突加减负载时,电流环响应速度提升明显。实测从空
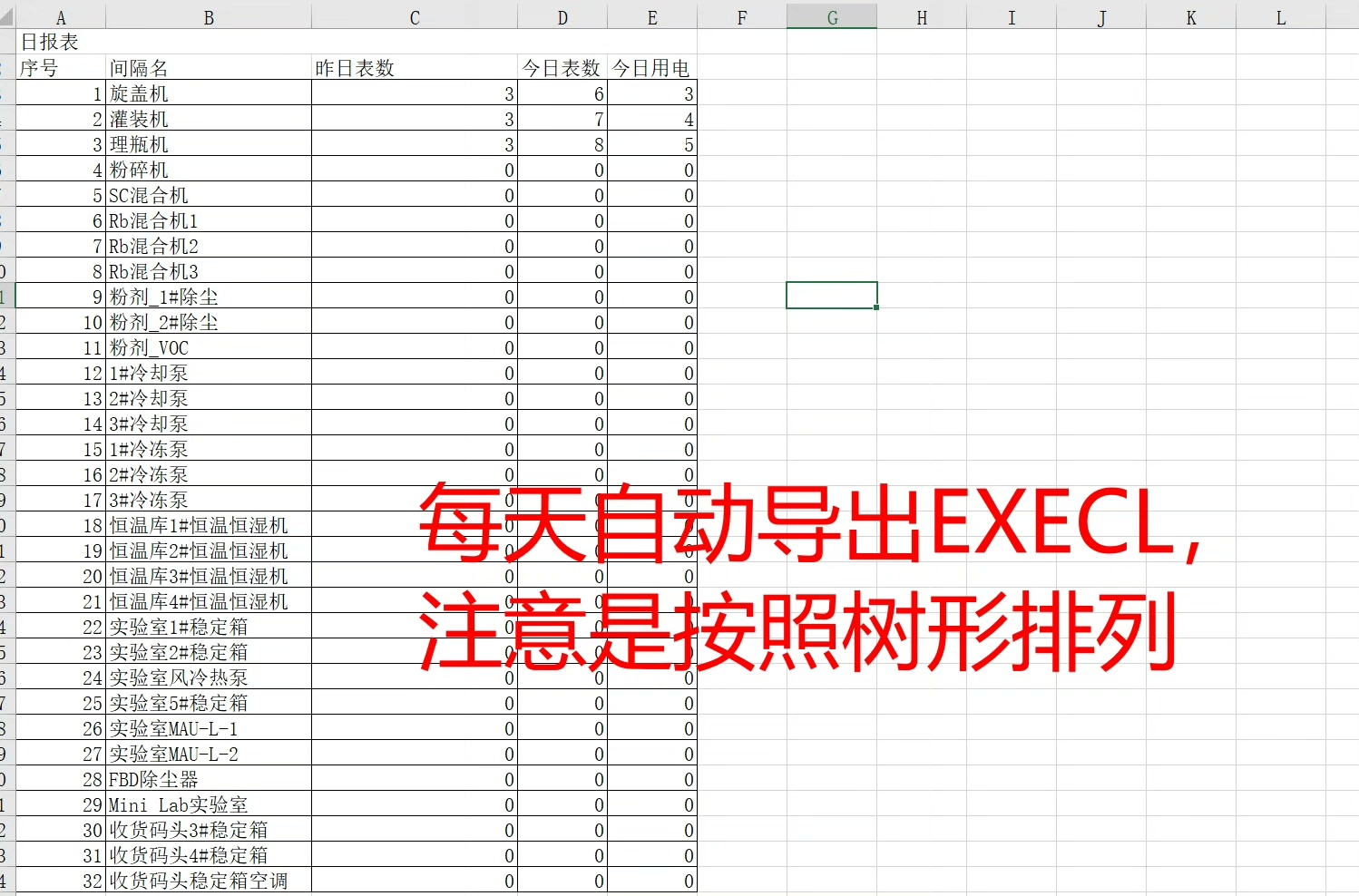
最后提醒:WINCC的VBScript不支持后期绑定,操作Excel时如果用CreateObject("Excel.Application")记得在全局脚本设置"Microsoft Excel对象库"引用,否则在有的工控机上会报神奇的错误码。用WINCC自带的数据库存数据,每天自动生成带折线图的Excel文件。注意时间戳用了NOW函数,实际项目中最好用WINCC内部时间同步,避免服务器和现场设备时
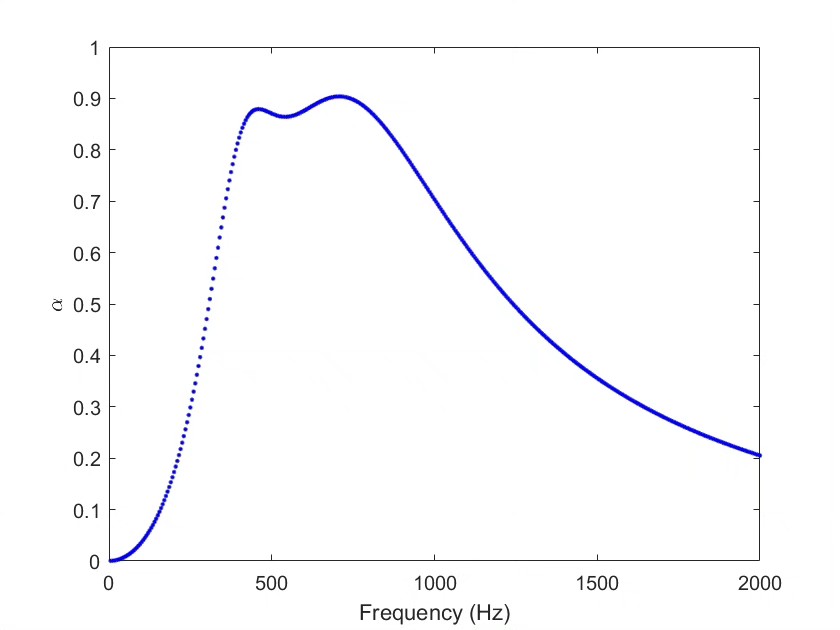
实测对比过,单层板在500Hz以下跟理论值误差不超过5%,但到2000Hz以上孔径效应开始作妖,这时候必须上COMSOL的全波仿真。实际建模时,并联结构得在几何上把两个不同参数的穿孔板并排摆放,用"装配体"功能处理连接关系。今天咱们不整虚的,直接上手搞点硬核操作——手把手教你玩转单层、双层、混搭结构的吸声系数计算。有个参数调优技巧:当计算发散时,把空气的损耗因子调高到0.1,算完再改回来,稳如老狗
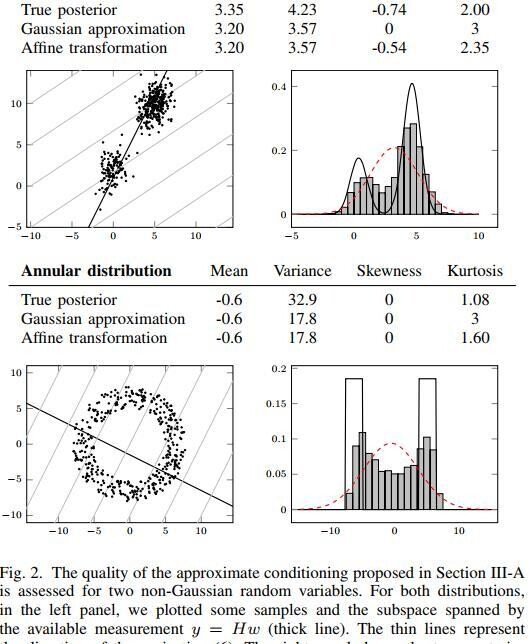
(1)一种实时机会约束决策的快速方法及其在电力系统中的应用源代码,保证正确使用情景方法来解决实时机会约束决策问题的可能性,在这些问题中,未知参数的新信息通过测量变得可用。约束的仿射性质已被利用来推导一种变化的场景方法,它不需要根据条件分布重新采样参数空间。通过对样本的预处理,可以用极其有限的计算资源来解决机会约束决策问题,使得该方法对具有实时控制规范的大规模系统具有吸引力。最后,所提出的方法可推广