




- @2403_86993842
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
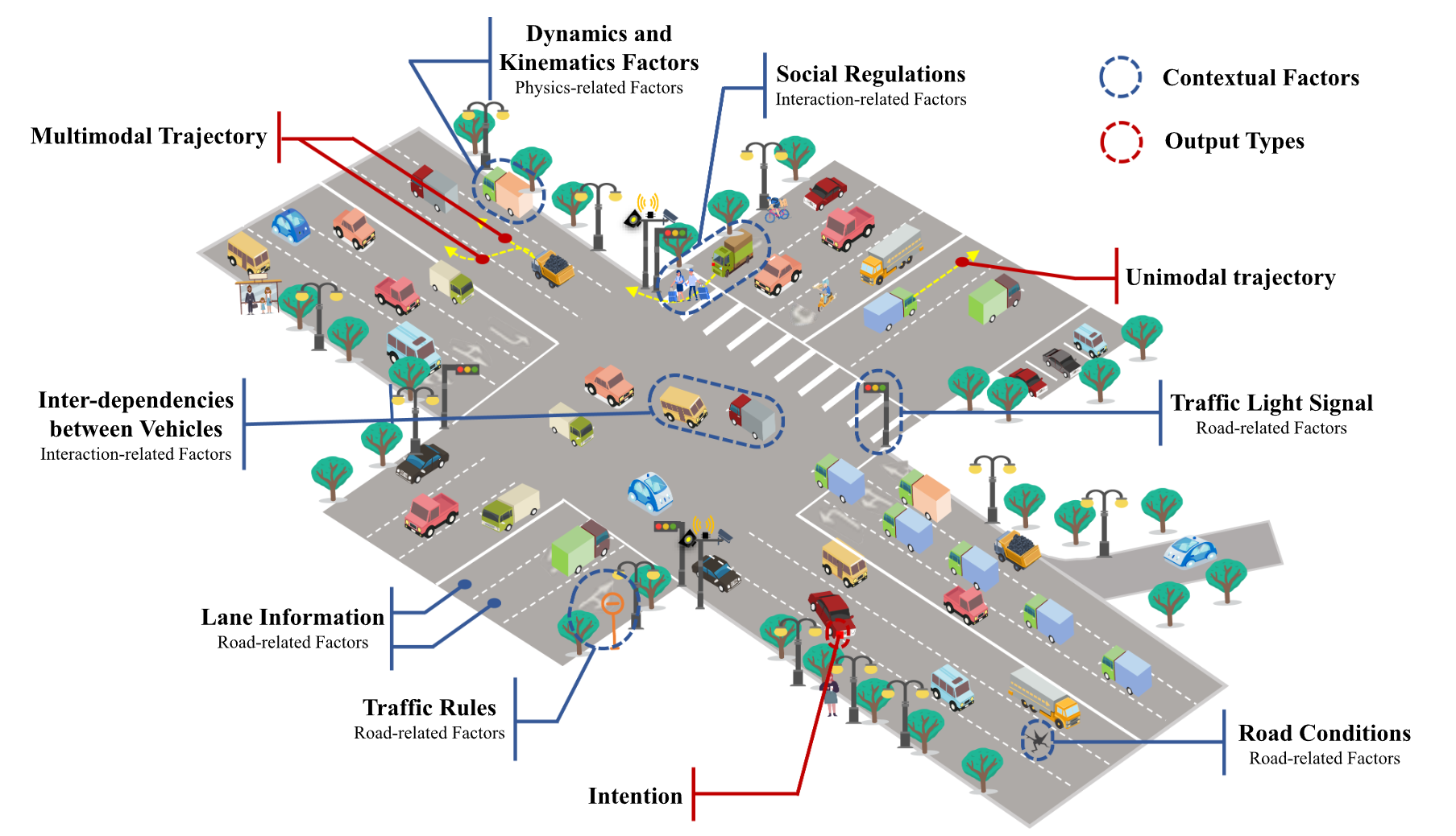
轨迹预测问题可以表述为: 给定场景信息, 基于交通参与者的历史状态, 预测他们未来的状态. 不管是基于物理学的方法, 还是基于深度学习, 强化学习的方法, 轨迹预测的输入输出大体都是类似的.本节将定义轨迹预测的输入输出.
世界模型(World Models)在人工智能领域中的定义和分类是多样化的,但普遍认同的是它们作为理解和预测世界的工具。根据最新的综述文献,我们可以将世界模型定义为AI系统内部构建的一种抽象表示,用于描述、理解和预测外部环境的状态及其变化。这种模型融合了AI系统从传感器接收的原始数据,通过复杂的处理和分析,形成对外部世界的全面认知和预测。在分类上,世界模型主要分为两大类:内部表征和未来预测。内部表

定义与提出者:RRT算法(Rapidly-exploring Random Tree,快速探索随机树)由Steven M. LaValle和James J. Kuffner Jr.提出,通过随机构建Space Filling Tree实现对非凸高维空间的快速搜索。应用场景:广泛应用于各种机器人的运动规划场景,特别是包含障碍物和差分运动约束的环境。算法变种:包括Basic RRT、基于概率的RRT、
网上的规划算法教程资料确实很多. 但是东一篇frenet, 西一篇QP优化, 大部分都是各路大佬写给自己看的学习笔记, 杂乱无章不成体系.很多规划算法教程只有理论推导, 但是没有配套代码. 好不容易把公式看的似懂非懂, 却没有代码让自己练手, 确定完全掌握算法细节.中真正掌握算法, 我们给几乎所有的算法章节, 都配置了对应的Python代码以及可视化展示. 代码主要参考了。当然, 小白说也为有额外
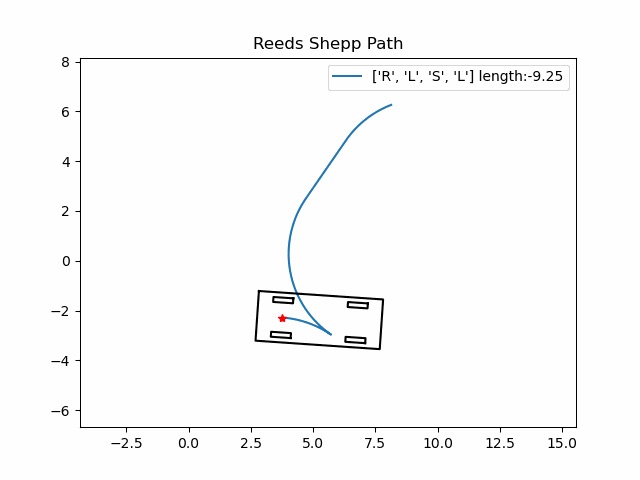
简单的说, Reeds Shepp曲线在Dubins曲线的基础上,允许切换车辆行驶方向,这在某些情况下能够找到比Dubins曲线更短的路径。Dubins曲线有6种组合方式, 以LSL为例, Reeds Shepp曲线为每一个运动基元都增加了前进()和后退(−−LSLLSL−LS−LLS−L−L−S−LL−SLL−SL−L−S−L−LSLLSL−LS−LLS−L−L−S−。
轨迹预测问题可以表述为: 给定场景信息, 基于交通参与者的历史状态, 预测他们未来的状态. 不管是基于物理学的方法, 还是基于深度学习, 强化学习的方法, 轨迹预测的输入输出大体都是类似的.本节将定义轨迹预测的输入输出.