- @2401_84202474
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
全网找了很多种解决措施,挨个试了一遍,各种降python、pylance版本,没有解决一点问题。
自动驾驶系统包含感知,决策和控制这三个主要模块。进一步来说,感知系统又包含了环境感知和车辆定位两个任务。环境感知利用各种传感器(摄像头、激光雷达、毫米波雷达等)检测各种移动和静止的障碍物(车辆、行人、建筑物等),以及收集道路上的各种信息。车辆定位则根据环境感知得到的信息来确定车辆在环境中所处位置,这里需要高精度地图,以及惯性导航(IMU)和全球定位系统(GPS)的辅助。对于环境感知系统,主要会用到
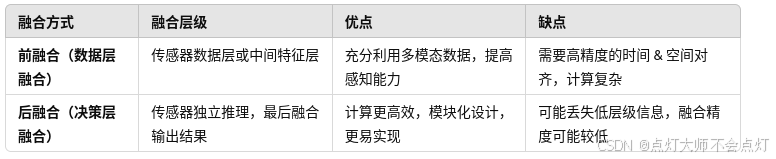
激光雷达作为一种可以直接并且精确获取3D信息的传感器,它与视觉的融合在多传感器感知系统中是非常重要的一环。后融合(决策层融合)和前融合(特征层融合)。当然有的时候也会是二者的结合。后融合主要是基于一些传统的方法,比如多目标跟踪,卡尔曼滤波状态估计等,另外也有一些基于机器学习模型的方法。后融合方法基本上不会区分具体融合的是什么传感器,因为融合的输入是各个传感器的感知结果。不管是什么传感器,感知结果的
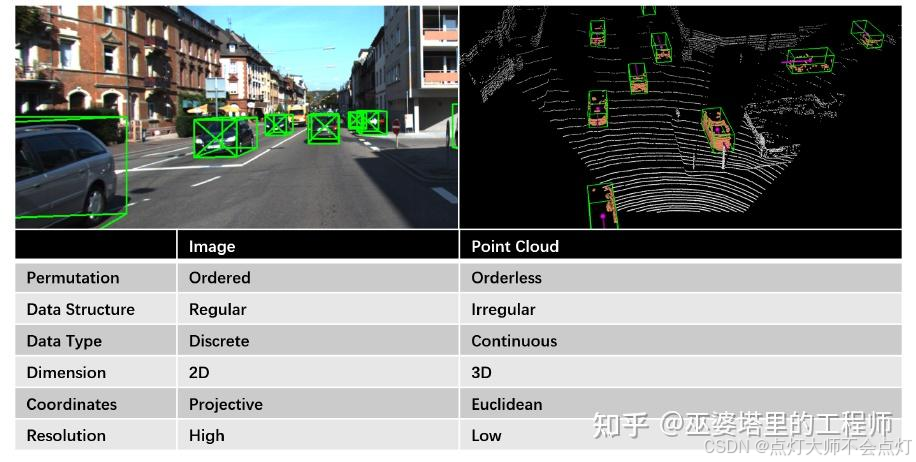
自动驾驶感知技术所采用的传感器主要包括摄像头、激光雷达和毫米波雷达,如何高效的融合多种传感器数据,成为了感知算法研究的热点之一。本篇文章介绍如何在感知任务中融合激光雷达和摄像头,重点是目前主流的基于深度学习的融合算法。摄像头产生的数据是2D图像,对于物体的形状和类别的感知精度较高。深度学习技术的成功起源于计算机视觉任务,很多成功的算法也是基于对图像数据的处理,因此目前基于图像的感知技术已经相对成熟
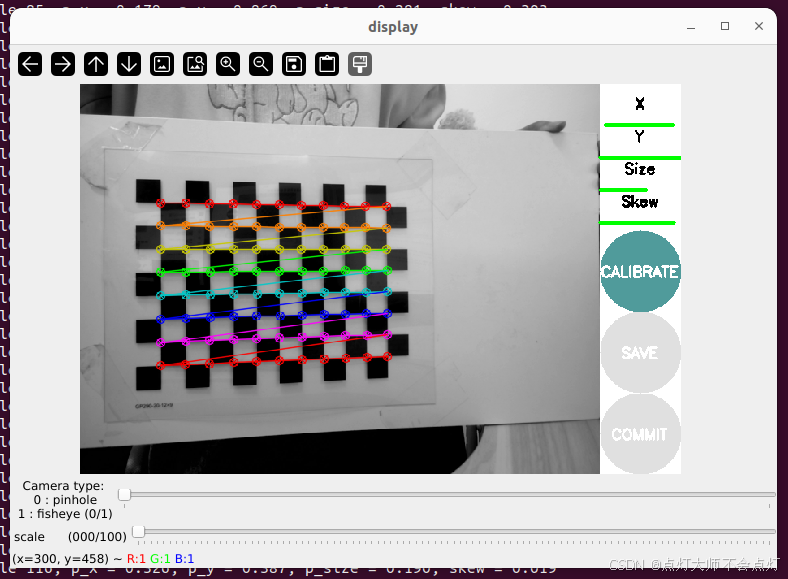
利用ros的image_pipeline软件包实现对相机的标定。进入工作目录下载image_pipeline【报错】: 通常是由于网络连接问题,尤其是从 GitHub 克隆大型仓库时,可能会遇到网络不稳定或连接中断的情况。【解决】: 默认情况下,Git 对 HTTP 请求的缓冲区大小有限制,你可以尝试增加缓冲区大小来解决此问题这会将缓冲区大小增加到 500MB,可能有助于解决因缓冲区不足导致的问题