




- @2301_77008172
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
企业级智能体架构选型指南(2026) 本文为企业选择AI智能体架构提供系统化框架。首先建议通过三个核心问题(企业规模、数据合规性、核心诉求)确定80%的选型方向。当前市场分化出三大技术路线:内嵌型(SaaS集成,适合中小企业)、平台型(中台化部署,适合中大型企业)和底座型(基础设施,适合头部企业)。落地时需考虑四种部署架构:单体编排式、多Agent协作式、沙箱隔离部署和托管式。成熟系统应包含接入层
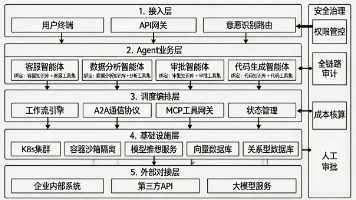
企业级智能体架构选型指南(2026) 本文为企业选择AI智能体架构提供系统化框架。首先建议通过三个核心问题(企业规模、数据合规性、核心诉求)确定80%的选型方向。当前市场分化出三大技术路线:内嵌型(SaaS集成,适合中小企业)、平台型(中台化部署,适合中大型企业)和底座型(基础设施,适合头部企业)。落地时需考虑四种部署架构:单体编排式、多Agent协作式、沙箱隔离部署和托管式。成熟系统应包含接入层
本文带你从零认识并上手 OpenAI Codex 智能编程代理,详细讲解 Codex 的工具定位、下载安装、两种登录计费方式。同时手把手演示界面布局、本地文件读写、三级安全权限配置、授权终端执行操作、全局记忆与项目级记忆自定义等核心实操功能,帮助新手快速掌握 AI 辅助开发技巧,实现从「只会用 AI」到「会管理、定制 AI」的进阶,大幅提升日常开发效率。

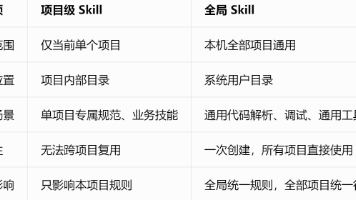
ClaudeCodeSkill是一种结构化、可复用的AI编程技能体系,通过标准化文档封装开发任务,提升协作效率。它分为项目级和全局Skill两类:项目级Skill仅作用于当前项目,全局Skill可跨项目复用。Skill采用按需加载机制,仅在匹配需求时载入完整指令,节省资源。用户可创建自定义Skill(如代码解释技能),或从开源平台获取现成Skill。该体系通过固化开发流程、统一标准,有效减少重复沟
ClaudeCode是Anthropic推出的第三代AI编程Agent,采用终端原生设计,具备自主理解项目、拆解任务、编写调试代码等完整开发能力。相比传统代码补全工具,它通过受控自主理念实现安全可控的AI编程,支持CLI终端、IDE插件等多种接入方式。文章详细介绍了其工作原理、环境搭建方法,并以开发番茄钟项目为例演示了完整使用流程,包括通过CCSwitch管理API密钥、安装依赖等关键步骤。作为工
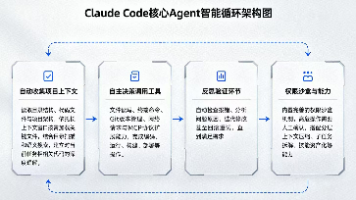
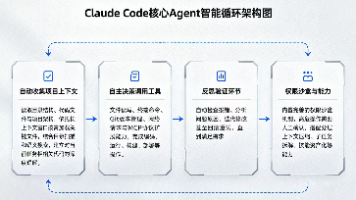
本文从 Agent Loop、工具系统、子代理、上下文管理、权限安全、扩展生态到部署形态,逐层拆解了 Claude Code的底层架构,并通过一个完整的任务生命周期示例串联全部概念。
ClaudeCodeSkill是一种结构化、可复用的AI编程技能体系,通过标准化文档封装开发任务,提升协作效率。它分为项目级和全局Skill两类:项目级Skill仅作用于当前项目,全局Skill可跨项目复用。Skill采用按需加载机制,仅在匹配需求时载入完整指令,节省资源。用户可创建自定义Skill(如代码解释技能),或从开源平台获取现成Skill。该体系通过固化开发流程、统一标准,有效减少重复沟
本文介绍了如何从零开始用Python搭建一个AI编程助手Claude Code,理解Agent的核心原理。项目目标:构建一个终端AI助手,能够理解自然语言指令并调用工具执行任务,实现"思考→行动→观察"的自主循环。
本文介绍了如何从零开始用Python搭建一个AI编程助手Claude Code,理解Agent的核心原理。项目目标:构建一个终端AI助手,能够理解自然语言指令并调用工具执行任务,实现"思考→行动→观察"的自主循环。
本文从 Agent Loop、工具系统、子代理、上下文管理、权限安全、扩展生态到部署形态,逐层拆解了 Claude Code的底层架构,并通过一个完整的任务生命周期示例串联全部概念。