无人机赋能的双上行链路协同非正交多址接入中的自适应解码机制(Matlab代码实现)
摘要——在本文中,我们针对无人机(Unmanned Aerial Vehicle,UAV)支持的上行链路(Uplink,UL)非正交多址接入(Non-Orthogonal Multiple Access,NOMA)通信,提出了一种新颖的自适应解码机制(Adaptive Decoding Mechanism,ADM)。
💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文内容如下:🎁🎁🎁
⛳️赠与读者
👨💻做科研,涉及到一个深在的思想系统,需要科研者逻辑缜密,踏实认真,但是不能只是努力,很多时候借力比努力更重要,然后还要有仰望星空的创新点和启发点。建议读者按目录次序逐一浏览,免得骤然跌入幽暗的迷宫找不到来时的路,它不足为你揭示全部问题的答案,但若能解答你胸中升起的一朵朵疑云,也未尝不会酿成晚霞斑斓的别一番景致,万一它给你带来了一场精神世界的苦雨,那就借机洗刷一下原来存放在那儿的“躺平”上的尘埃吧。
或许,雨过云收,神驰的天地更清朗.......🔎🔎🔎
💥1 概述
无人机辅助双上行协调非正交多址自适应解码机制研究
摘要
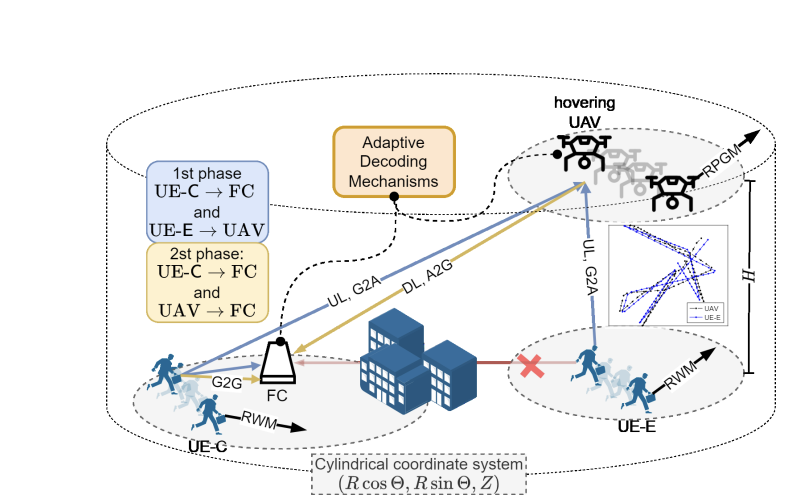
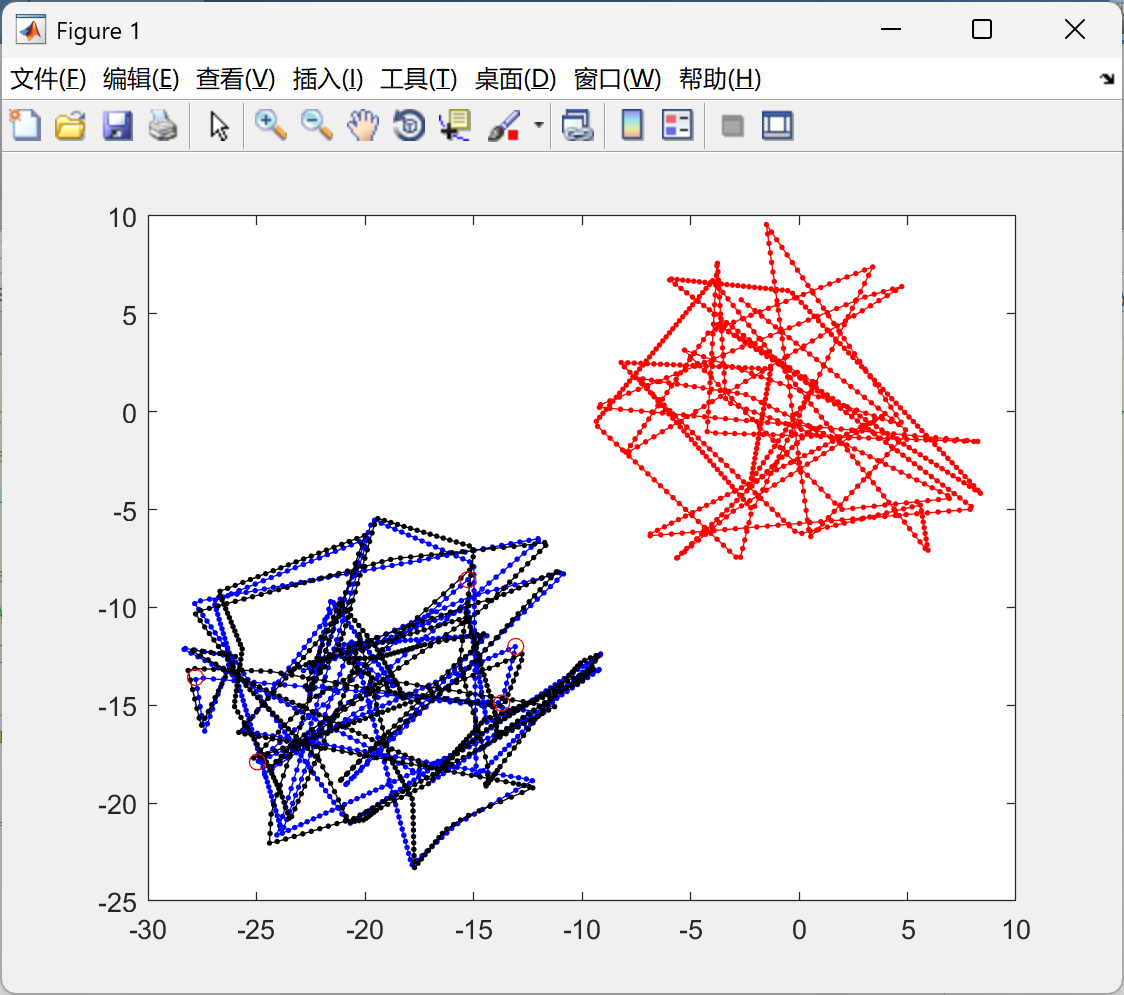
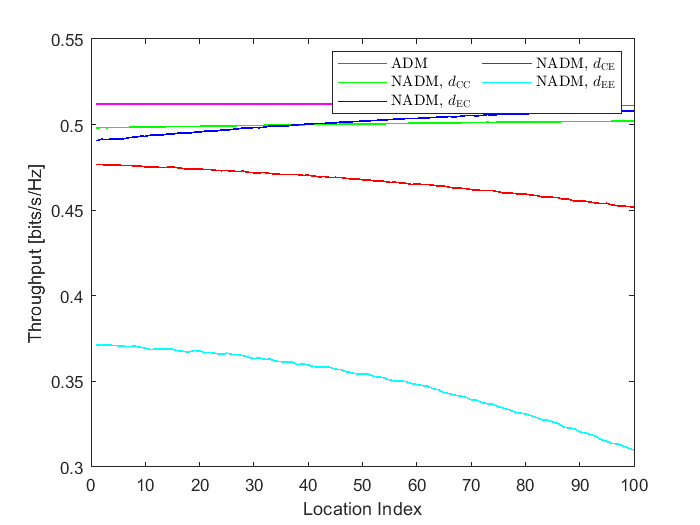
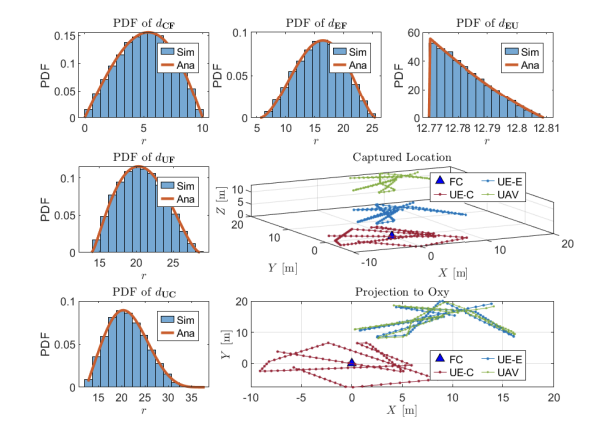
摘要——在本文中,我们针对无人机(Unmanned Aerial Vehicle,UAV)支持的上行链路(Uplink,UL)非正交多址接入(Non-Orthogonal Multiple Access,NOMA)通信,提出了一种新颖的自适应解码机制(Adaptive Decoding Mechanism,ADM)。具体而言,考虑到恶劣的无人机通信环境(在这种环境下,地面到地面的链路通常无法使用),所提出的ADM克服了传统上行链路非正交多址接入系统面临的挑战性问题,传统系统的性能对发射端的统计信道状态信息和接收端的解码顺序十分敏感。为了评估该自适应解码机制的性能,我们推导了系统中断概率(Outage Probability,OP)和系统吞吐量的封闭形式表达式。在性能分析部分,我们给出了实用的空对地和地对空信道的新表达式,同时考虑了上行链路非正交多址接入中不完美串行干扰消除(Successive Interference Cancellation,SIC)的实际实现情况。此外,所得到的表达式可用于描述基于伽马混合分布(Mixture of Gamma,MG)衰落信道的各类系统的中断概率。接下来,我们提出了一种次优的基于梯度下降的算法,以获取无人机轨迹上每个位置处能实现最大吞吐量的功率分配系数。为了确定所提出的自适应解码机制在非静态环境中的重要性,我们分别考虑地面用户和无人机按照随机路点移动模型(Random Waypoint Mobility,RWM)和参考点群组移动模型(Reference Point Group Mobility,RPGM)移动的情况。同时,我们还给出了距离分布的精确公式。数值解表明,采用自适应解码机制的非正交多址接入不仅优于正交多址接入(Orthogonal Multiple Access,OMA),而且在移动环境下也能提升无人机支持的上行链路非正交多址接入的性能。
索引术语——非正交多址接入,无人机,上行链路,自适应解码,中断概率,吞吐量,移动模型,优化
本文提出了一种无人机辅助双上行协调非正交多址(NOMA)自适应解码机制,旨在解决无人机通信环境中上行链路的高动态性和复杂性带来的挑战。该机制通过动态调整解码顺序和功率分配,以适应不断变化的信道状态和用户需求,从而提升系统性能和可靠性。仿真结果表明,该机制在提高系统吞吐量和降低中断概率方面具有显著优势。
一、引言
随着无人机技术的飞速发展,无人机在通信领域的应用日益广泛。无人机不仅可以作为独立的飞行平台执行任务,还可以融入现有的通信网络,扮演多种角色,如移动基站、中继节点等。在无人机通信场景中,上行链路通信受到多种因素的影响,如信道衰落、干扰等,导致传统正交多址接入(OMA)方式难以满足日益增长的通信需求。
非正交多址(NOMA)技术通过允许不同用户在同一时频资源块上进行非正交传输,并在接收端利用先进的信号处理技术进行区分和解码,从而有效提升了系统容量和频谱效率。然而,无人机通信环境的高动态性和复杂性对NOMA系统的解码机制提出了更高要求。因此,研究一种适用于无人机通信环境的自适应解码机制显得尤为重要。
二、系统模型
2.1 系统架构
考虑一个简化的无人机双上行链路协调NOMA系统,包含两架无人机(UAV 1和UAV 2)和一个地面基站(BS)。UAV 1和UAV 2在地面基站的调度下,同时在同一个时频资源块上向地面基站传输数据。为了实现协调NOMA,两架无人机需要共享一定的信道状态信息或调度信息,以便地面基站能够进行有效的信号区分和解码。
2.2 信道模型
无人机上行链路信道与传统的地面通信信道相比,具有以下显著特点:
- 高动态性:无人机在三维空间中高速移动,导致信道衰落特性快速变化,多普勒频移效应显著。
- 复杂环境:无人机可能在高空、城市峡谷、开阔区域等不同环境中飞行,信道受到障碍物遮挡、地面反射、建筑物散射等多种因素影响,可能存在视距(LOS)和非视距(NLOS)传播路径的混合。
- 仰角相关:无人机与地面基站之间的信道特性与仰角密切相关。随着仰角的增加,视距传播的概率通常会增加,但同时也会受到大气损耗等因素的影响。
2.3 NOMA传输模型
在NOMA系统中,不同用户被分配不同的功率水平以实现谱效率的提高。基站会根据用户的信道质量信息和其他系统限制来分配功率,通常会为信道质量较差的用户分配更高的功率,以提高其信号接收质量。每个用户在指定的时间和频率资源上发送数据,由于采用NOMA,不同用户的数据可以同时传输,并且由基站进行解码。
三、自适应解码机制设计
3.1 解码技术概述
传统的NOMA解码技术主要包括串行干扰消除(SIC)和并行干扰消除(PIC)。
- SIC:一种迭代的解码方法,其基本思想是先解码信道增益最强的用户信号,然后将该用户的信号重构并从接收到的叠加信号中减去,从而消除其对其他用户的干扰。重复此过程,直到所有用户的信号都被解码出来。SIC相对简单,实现复杂度较低,但存在误差传播问题,且解码顺序对信道变化不敏感。
- PIC:一种并行的解码方法,其基本思想是同时对所有用户的信号进行初步解码,然后利用这些初步解码结果来估计和消除用户之间的干扰,最后进行迭代优化,直到获得满意的解码结果。PIC不存在误差传播问题(至少在一次迭代内),对信道变化具有一定的鲁棒性,但复杂度较高,需要较高的计算能力。
3.2 自适应解码机制
针对无人机通信环境的高动态性和复杂性,本文提出一种自适应解码机制,该机制能够根据实时的信道状态信息、干扰水平和无人机特性,动态地调整解码策略。该机制的设计包含以下关键要素:
- 实时信道状态信息获取与预测:无人机实时监测信道条件,包括路径损耗、多普勒效应和干扰水平。根据监测结果动态调整解码策略。在更复杂的场景下,可能存在多架无人机同时向地面基站传输数据,可以根据无人机之间的信道增益差异、优先级、服务质量要求等因素,将无人机进行聚类分组,在每个组内采用NOMA技术。
- 自适应解码策略选择:根据实时获取或预测的信道状态信息,自适应地选择最优的解码策略。例如,在信道条件较好时,可以选择SIC以降低复杂度;在信道条件较差或存在严重干扰时,可以选择PIC以提高解码成功率。
- 动态功率分配:用户根据信道条件动态调整发射功率,确保无人机能有效解码。信道条件好的用户降低功率,信道条件差的用户适当增加功率。
- 反馈与调整:无人机通过反馈链路将解码结果或信道状态信息发送给用户设备,用户根据反馈调整发射功率或调制编码方案(MCS),形成闭环控制。
四、性能分析
4.1 性能指标
为了评估自适应解码机制的性能,本文采用系统中断概率(OP)和系统吞吐量作为性能指标。
- 系统中断概率(OP):指系统无法正确解码用户信号的概率,是衡量系统可靠性的重要指标。
- 系统吞吐量:指系统在单位时间内成功传输的数据量,是衡量系统容量的重要指标。
4.2 理论分析
本文推导了系统中断概率和系统吞吐量的封闭形式表达式,这些表达式不仅考虑了信道衰落和干扰的影响,还考虑了不完美SIC的实现。此外,还提供了实用的空对地和地对空信道的新表达式,以更准确地描述无人机通信环境。
4.3 仿真验证
为了验证自适应解码机制的性能,本文进行了数值仿真。仿真结果表明,自适应解码机制在提高系统吞吐量和降低中断概率方面具有显著优势。特别是在移动环境中,自适应解码机制能够根据信道条件的变化动态调整解码策略,从而保持较高的系统性能。
五、结论与展望
本文提出了一种无人机辅助双上行协调NOMA自适应解码机制,该机制通过动态调整解码顺序和功率分配,以适应不断变化的信道状态和用户需求。仿真结果表明,该机制在提高系统吞吐量和降低中断概率方面具有显著优势。未来工作将包括:
- 更高效的解码机制研究:继续研究更高效的解码机制,如基于深度学习的解码算法,以进一步提高解码成功率和系统性能。
- 更复杂的场景仿真:考虑更多复杂的通信场景,如多无人机协同通信、异构网络融合等,对自适应解码机制进行更全面的验证和优化。
- 实际系统部署与测试:将自适应解码机制应用于实际无人机通信系统中,进行实地测试和性能评估,为无人机通信技术的商业化应用提供有力支持。
📚2 运行结果
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。(文章内容仅供参考,具体效果以运行结果为准)

🌈4 Matlab代码、数据、文章下载
资料获取,更多粉丝福利,MATLAB|Simulink|Python资源获取


惟楚有才,于斯为盛。欢迎来到长沙!!! 茶颜悦色、臭豆腐、CSDN和你一个都不能少~
更多推荐

 7
7 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)