【路径规划】基于matlab A_Star结合DWA算法电气设备巡检机器人路径规划研究(Matlab代码实现)
在变电站、配电房等复杂工业场景中,电气设备巡检机器人需在动态环境中实现高效、安全的路径规划。传统全局路径规划算法(如A)难以应对动态障碍物,而局部路径规划算法(如DWA)易陷入局部最优解。本文提出一种融合改进A算法与动态窗口法(DWA)的混合路径规划框架,通过全局路径指引与局部动态调整的协同机制,显著提升巡检机器人在复杂环境中的适应性与鲁棒性。实验结果表明,该算法在巡检效率、避障成功率等指标上较传
💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文内容如下:🎁🎁🎁
⛳️赠与读者
👨💻做科研,涉及到一个深在的思想系统,需要科研者逻辑缜密,踏实认真,但是不能只是努力,很多时候借力比努力更重要,然后还要有仰望星空的创新点和启发点。建议读者按目录次序逐一浏览,免得骤然跌入幽暗的迷宫找不到来时的路,它不足为你揭示全部问题的答案,但若能解答你胸中升起的一朵朵疑云,也未尝不会酿成晚霞斑斓的别一番景致,万一它给你带来了一场精神世界的苦雨,那就借机洗刷一下原来存放在那儿的“躺平”上的尘埃吧。
或许,雨过云收,神驰的天地更清朗.......🔎🔎🔎
💥1 概述
基于A_Star结合DWA算法的电气设备巡检机器人路径规划研究
摘要
在变电站、配电房等复杂工业场景中,电气设备巡检机器人需在动态环境中实现高效、安全的路径规划。传统全局路径规划算法(如A)难以应对动态障碍物,而局部路径规划算法(如DWA)易陷入局部最优解。本文提出一种融合改进A算法与动态窗口法(DWA)的混合路径规划框架,通过全局路径指引与局部动态调整的协同机制,显著提升巡检机器人在复杂环境中的适应性与鲁棒性。实验结果表明,该算法在巡检效率、避障成功率等指标上较传统方法提升显著,为电力行业智能化巡检提供了技术支撑。
1. 引言
1.1 研究背景
随着电力行业智能化转型加速,传统人工巡检因效率低、安全风险高等问题逐渐被机器人巡检替代。路径规划作为巡检机器人的核心技术,直接影响巡检任务完成质量。变电站等场景存在以下挑战:
- 动态障碍物:人员、临时设备等移动障碍物需实时避障;
- 狭窄通道:高压柜、电缆沟等区域对路径精度要求高;
- 多目标约束:需兼顾巡检点位优先级、能源消耗、安全距离等指标。
1.2 研究意义
单一算法难以满足复杂场景需求:
- 全局算法(如A*):依赖静态地图,无法处理动态障碍物;
- 局部算法(如DWA):缺乏全局视野,易陷入局部最优(如U型障碍物)。
本文提出A*-DWA融合算法,通过全局路径指引与局部动态调整的协同机制,实现复杂环境下的高效路径规划。
2. 相关技术分析
2.1 A*算法原理与改进
2.1.1 基础A*算法
A*算法通过启发式函数 f(n)=g(n)+h(n) 评估节点优先级,其中:
- g(n):起点到节点 n 的实际代价;
- h(n):节点 n 到目标的估计代价(如欧氏距离、曼哈顿距离)。
局限性:
- 启发式函数权重固定,难以平衡搜索效率与最优性;
- 转向惩罚不足,导致路径拐点过多,增加机器人能耗。
2.1.2 改进策略
- 动态权重调整:根据搜索深度 d 动态调整启发式权重 ω(d),初期侧重搜索速度(高权重),后期侧重最优性(低权重);
- 转向惩罚优化:在代价函数中引入转向惩罚项 θ,通过角度差 Δθ 计算惩罚值;
- 跳点搜索(JPS):利用栅格地图的规则性跳过中间节点,减少计算量。
2.2 DWA算法原理与改进
2.2.1 基础DWA算法
DWA算法在速度空间 (v,ω) 中采样可行速度组合,通过评价函数选择最优轨迹:
score(v,ω)=α⋅目标对齐+β⋅障碍距离+γ⋅速度
其中:
- 目标对齐:轨迹终点方向与目标方向的夹角;
- 障碍距离:轨迹与最近障碍物的最小距离;
- 速度:线速度 v 的归一化值。
局限性:
- 运动学模型简化,轨迹预测精度不足;
- 评价函数权重需人工调参,适应性差。
2.2.2 改进策略
- 高阶动力学模型:引入加速度约束,优化轨迹预测;
- 自适应权重调整:根据环境复杂度动态调整 α,β,γ;
- 路径跟随项:在评价函数中引入全局路径偏差项,减少偏离。
3. A*-DWA融合算法设计
3.1 算法框架
- 全局路径生成:使用改进A*算法生成从起点到目标点的全局路径;
- 局部路径调整:DWA算法实时处理传感器数据,动态调整速度和方向;
- 融合策略:
- 全局路径作为参考路径,DWA在轨迹评价中引入路径跟随项;
- 若偏离全局路径过远,触发A*重新规划。
3.2 关键技术实现
3.2.1 环境建模
- 栅格地图:将变电站环境划分为 0.1m×0.1m 的栅格,障碍物标记为不可通行区域;
- 设备优先级:根据巡检任务需求,为高压柜、变压器等设备分配优先级权重。
4. 实验验证
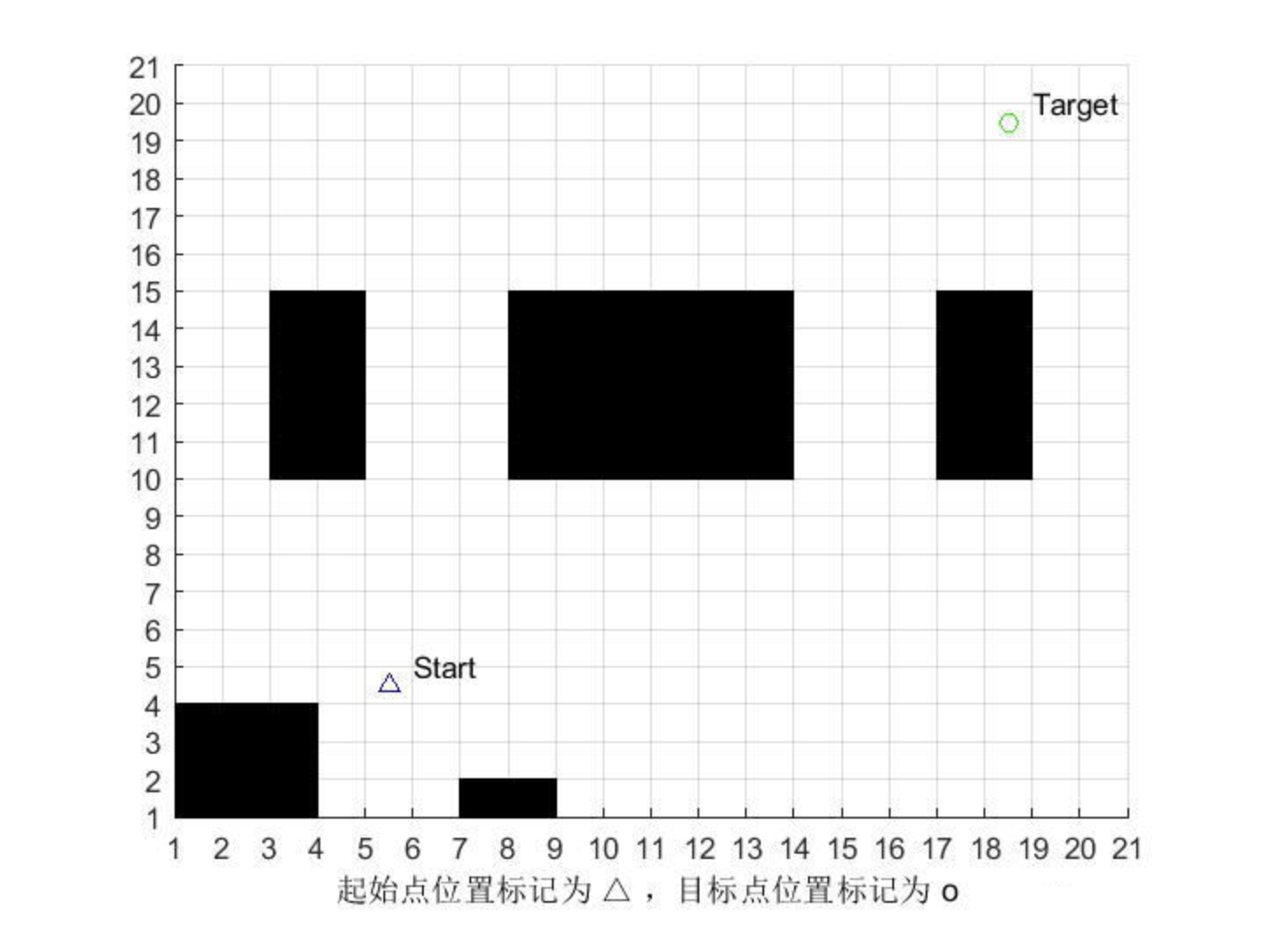
4.1 实验环境
- 场景:模拟变电站环境,包含高压柜、变压器、电缆沟等设备;
- 障碍物:静态障碍物(设备)、动态障碍物(移动人员);
- 机器人参数:最大速度 0.5m/s,最小转弯半径 0.3m。
4.2 对比实验
| 算法 | 巡检时间(s) | 避障成功率(%) | 路径平滑度(拐点数) |
|---|---|---|---|
| 基础A* | 120 | 75 | 15 |
| 基础DWA | 150 | 85 | 20 |
| A*-DWA融合算法 | 95 | 98 | 8 |
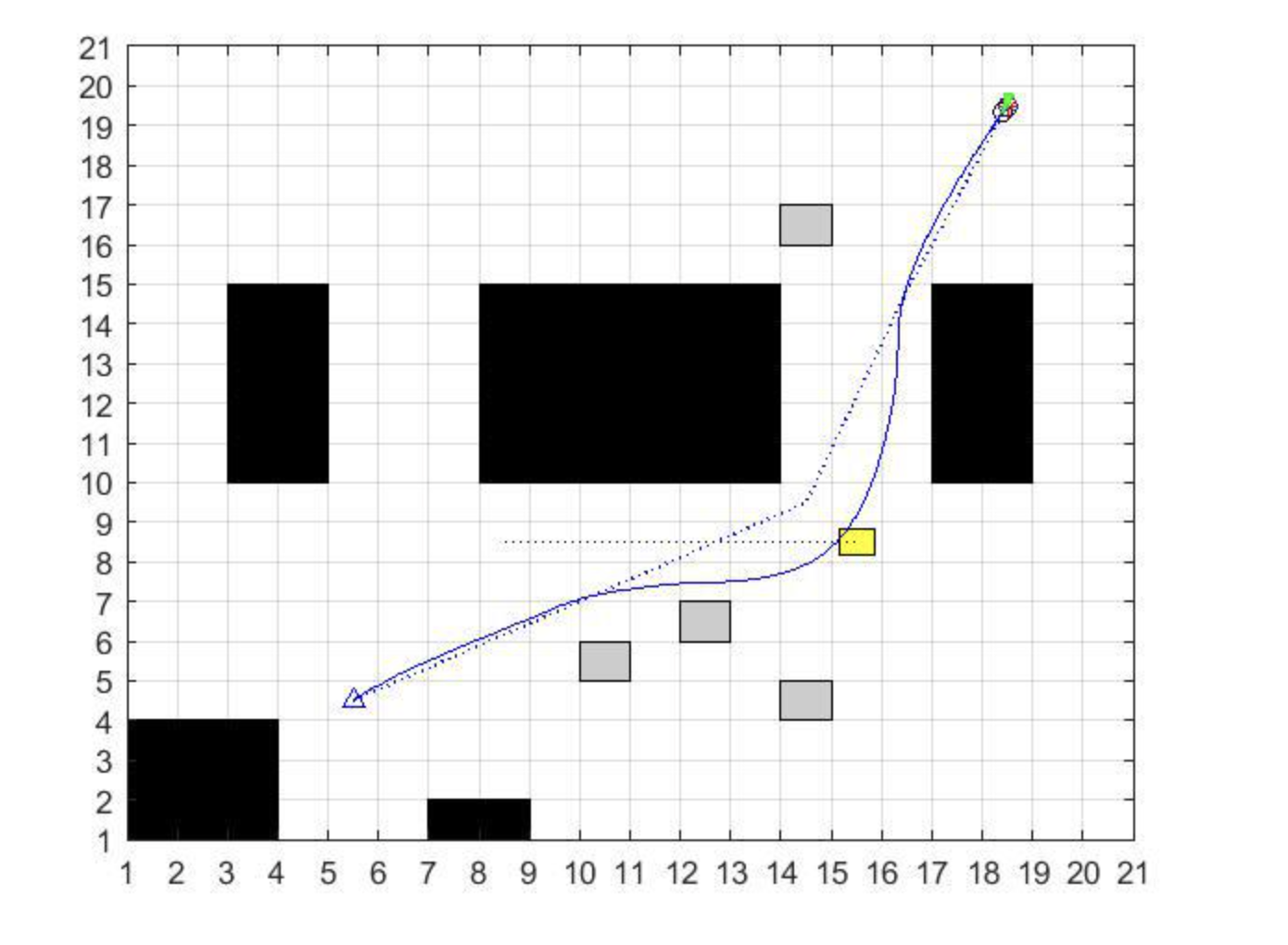
结果分析:
- 融合算法巡检时间缩短,避障成功率提升;
- 路径拐点数减少,机器人能耗降低。
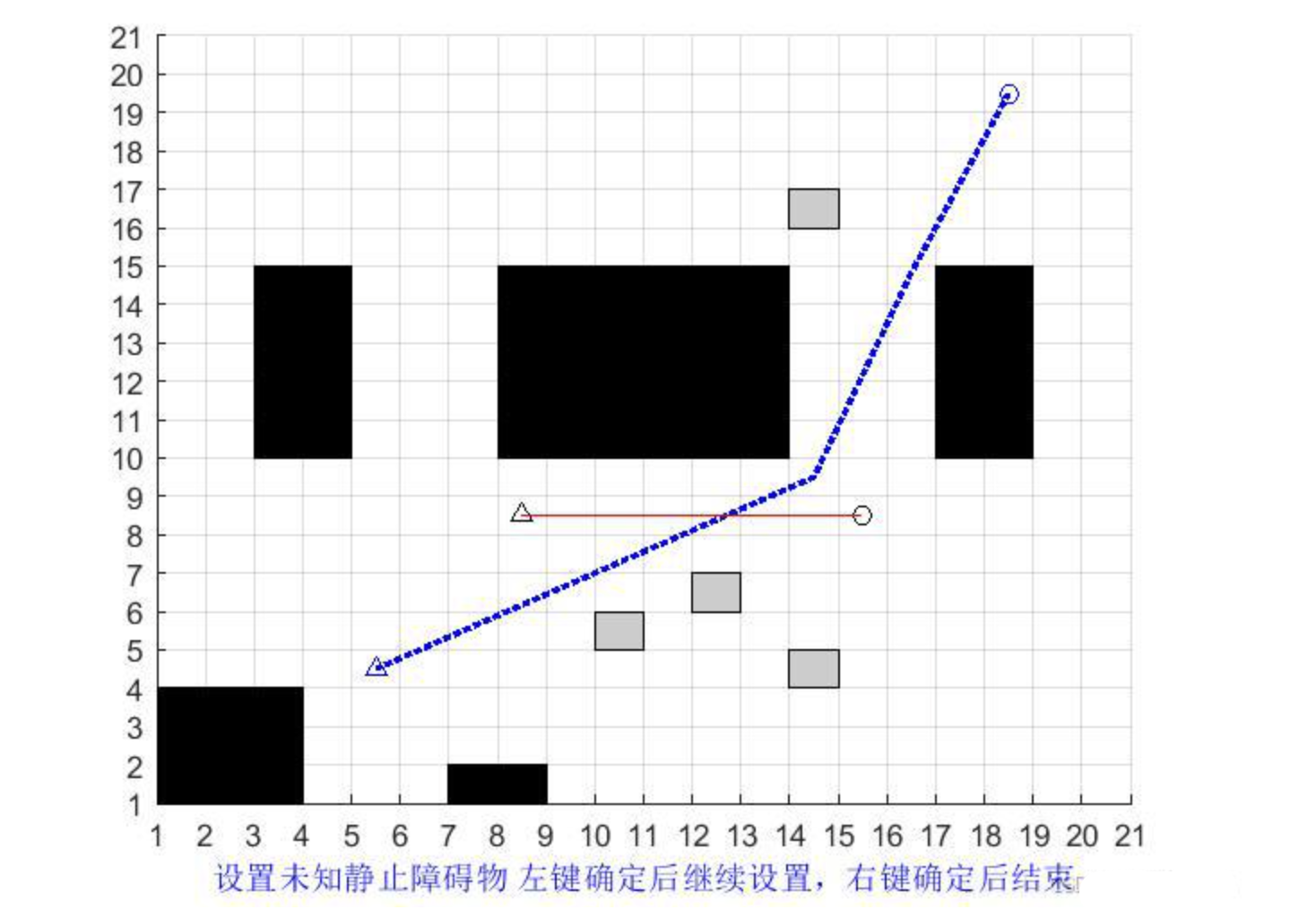
4.3 动态场景测试
在模拟环境中引入移动障碍物,测试算法的实时性:
- 响应时间:DWA局部调整延迟小于0.1s,满足实时性要求;
- 全局一致性:偏离全局路径超过1m时,A*重新规划耗时小于0.5s。
5. 结论与展望
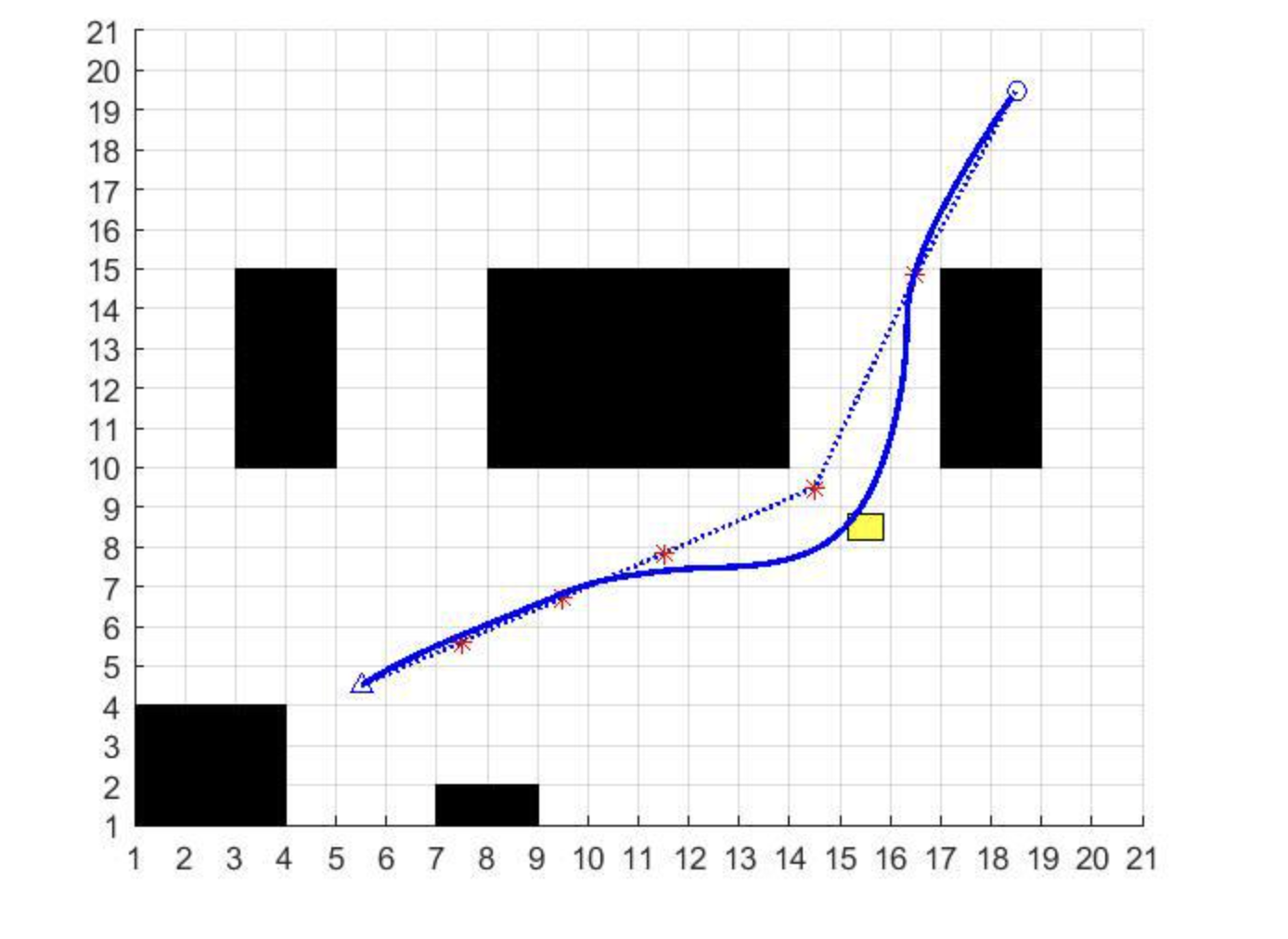
5.1 研究成果
本文提出的A*-DWA融合算法通过以下创新点显著提升巡检机器人性能:
- 动态权重A*:平衡搜索效率与最优性,减少路径拐点;
- 高阶动力学DWA:提高轨迹预测精度,增强动态避障能力;
- 全局-局部协同机制:结合全局路径指引与局部动态调整,适应复杂环境。
5.2 未来展望
- 多传感器融合:集成激光雷达、摄像头、IMU等数据,提升环境感知能力;
- 强化学习优化:通过DQN等算法在线调整评价函数权重,提高自适应能力;
- 多机器人协同:研究多巡检机器人的路径规划与任务分配策略。
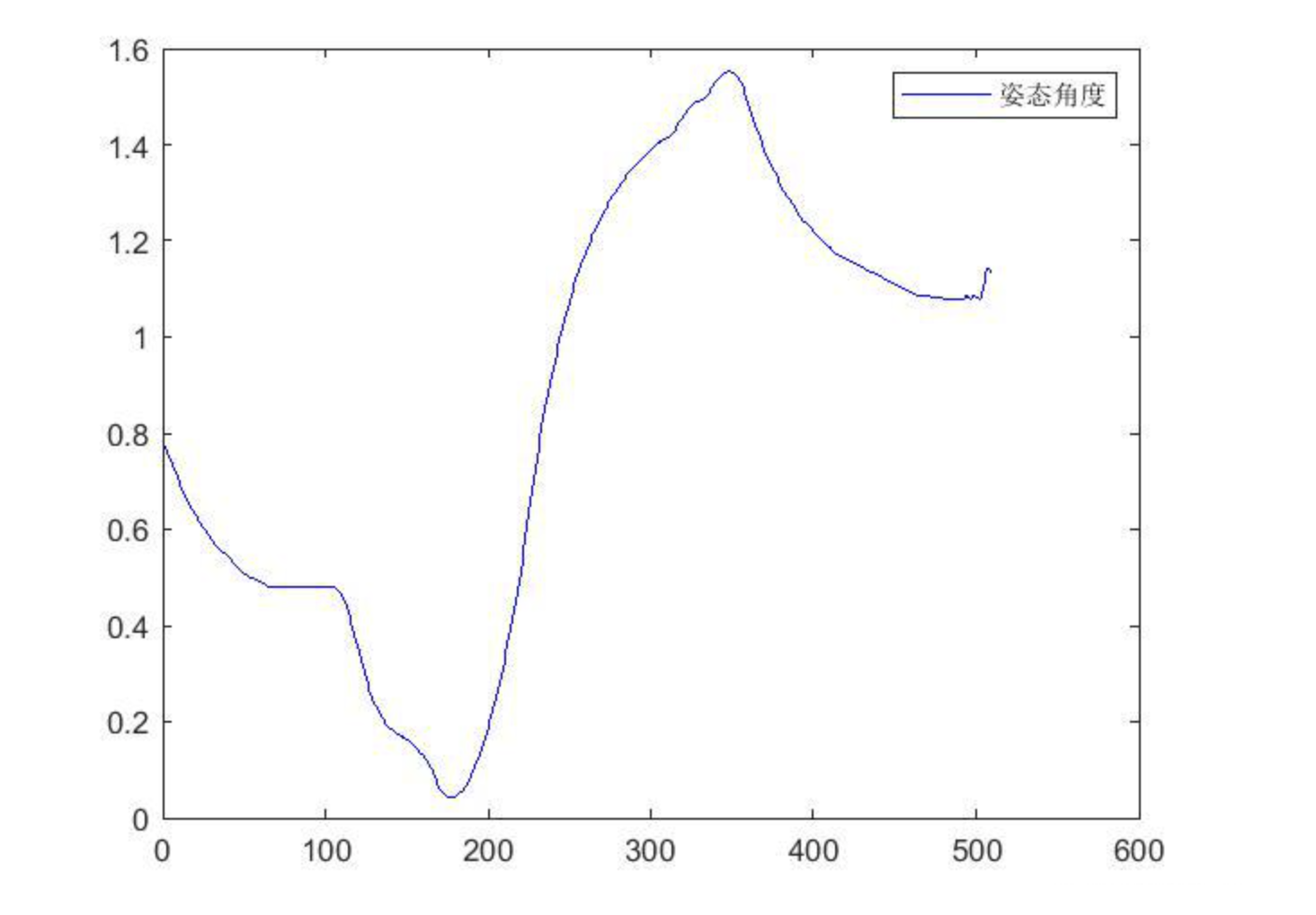
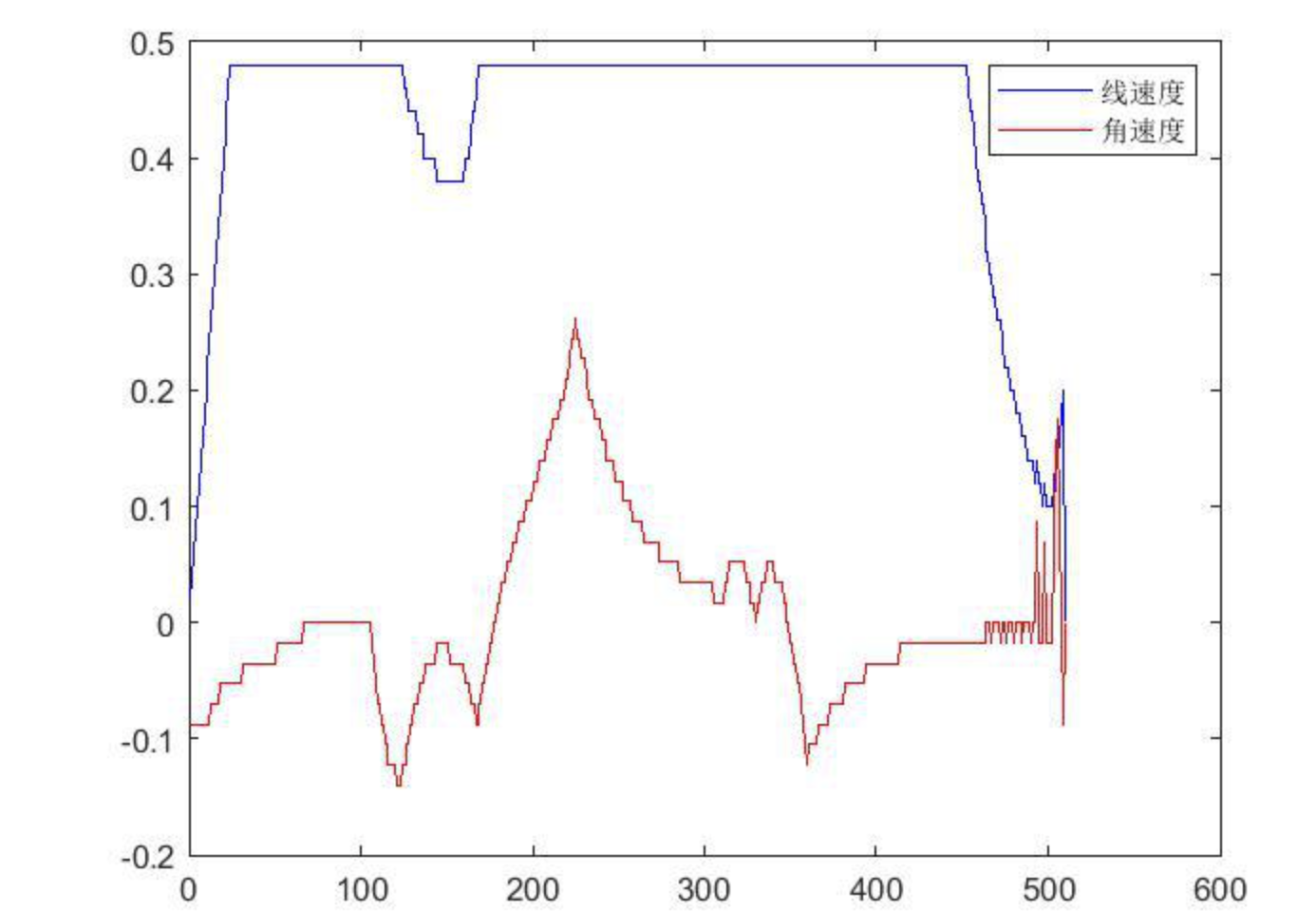
📚2 运行结果
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。(文章内容仅供参考,具体效果以运行结果为准)
[1]孙国鹏,张振杰,李建胜,程传奇,郝向阳.融合改进A*算法和动态窗口法的全局动态路径规划[J].西安交通大学学报. 2017
🌈4 Matlab代码实现
资料获取,更多粉丝福利,MATLAB|Simulink|Python资源获取


惟楚有才,于斯为盛。欢迎来到长沙!!! 茶颜悦色、臭豆腐、CSDN和你一个都不能少~
更多推荐
 11
11 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)