
雷达信号处理系统全流程仿真:从基础波形到分布式协同【附python代码】
雷达信号处理核心理论体系:从基础波形到分布式协同
雷达信号处理链路涵盖电磁波传播、波形设计、目标检测、参数估计与阵列空时自适应处理等多个层次。本文系统梳理雷达方程、LFM脉冲压缩、多普勒处理与MTD、CFAR检测、阵列波束形成与超分辨测向、MTI/STAP、MIMO虚拟孔径、波形设计以及分布式多站融合与时间同步等关键理论模块,力求为雷达通信与深度学习领域的研究者提供一份扎实的系统性参考。
一、引言
雷达系统的本质是通过发射电磁波并接收目标回波来提取距离、速度、角度等信息。从单个脉冲到相参脉冲串,从固定波束到自适应空时处理,从单站探测到分布式协同,信号处理的每一个环节都受到物理规律的约束:信噪比随距离的四次方衰减、时宽带宽积决定压缩增益、多普勒模糊与距离模糊的耦合、阵列孔径与角度分辨率的权衡、杂波脊的空时耦合特性……这些底层约束既是挑战,也是创新算法的源头。
本文将以雷达信号处理的全链路为主线,系统阐述以下核心理论模块:
-
雷达方程:功率预算与探测距离的定量关系
-
LFM脉冲压缩:通过时宽带宽积同时获得大能量与高分辨
-
多普勒处理与MTD:利用慢时间FFT实现速度分辨与动目标检测
-
CFAR检测:自适应门限维持恒定虚警率
-
阵列信号处理:波束形成、MVDR自适应抗干扰、MUSIC/ESPRIT超分辨测向
-
MTI与STAP:从时域对消到空时二维联合杂波抑制
-
MIMO雷达:正交波形分集与虚拟孔径扩展
-
波形设计:OFDM多载波与相位编码的模糊函数特性
-
分布式雷达:多站定位、GDOP、相参/准相参积累与PTP时间同步
本文力求从物理直觉出发,辅以数学推导,为读者勾勒出一幅完整且可延展的理论图谱。
二、雷达方程与探测基础
2.1 基本雷达方程
单基地脉冲雷达接收的信号功率为:
P r = P t G 2 λ 2 σ ( 4 π ) 3 R 4 P_r = \frac{P_t G^2 \lambda^2 \sigma}{(4\pi)^3 R^4} Pr=(4π)3R4PtG2λ2σ
式中 P t P_t Pt 为峰值发射功率, G G G 为天线增益(收发共用), λ \lambda λ 为波长, σ \sigma σ 为目标雷达截面积(RCS), R R R 为目标距离。接收机噪声功率为 P n = k T 0 F B P_n = k T_0 F B Pn=kT0FB,其中 k k k 为玻尔兹曼常数, T 0 = 290 K T_0=290\,K T0=290K 为标准噪声温度, F F F 为噪声系数, B B B 为接收机带宽。因此单脉冲信噪比为:
SNR = P t G 2 λ 2 σ ( 4 π ) 3 R 4 k T 0 F B \text{SNR} = \frac{P_t G^2 \lambda^2 \sigma}{(4\pi)^3 R^4 k T_0 F B} SNR=(4π)3R4kT0FBPtG2λ2σ
此式揭示了四个关键趋势:
-
SNR ∝ 1 / R 4 \text{SNR} \propto 1/R^4 SNR∝1/R4:距离加倍,SNR 下降12 dB,这是雷达探测距离受限的根本原因。
-
SNR ∝ λ 2 \text{SNR} \propto \lambda^2 SNR∝λ2:长波长有利于功率传播,但角分辨率较低。
-
SNR ∝ σ \text{SNR} \propto \sigma SNR∝σ:隐身技术通过减小RCS降低可探测性。
-
SNR ∝ 1 / B \text{SNR} \propto 1/B SNR∝1/B:带宽越宽,噪声功率越大,但这与脉冲压缩的矛盾将在下一节讨论。
2.2 最大探测距离与脉冲能量
若定义最小可检测信噪比为 SNR min \text{SNR}_{\min} SNRmin(通常取13 dB),则可解出最大探测距离:
R max = [ P t G 2 λ 2 σ ( 4 π ) 3 k T 0 F B ⋅ SNR min ] 1 / 4 R_{\max} = \left[ \frac{P_t G^2 \lambda^2 \sigma}{(4\pi)^3 k T_0 F B \cdot \text{SNR}_{\min}} \right]^{1/4} Rmax=[(4π)3kT0FB⋅SNRminPtG2λ2σ]1/4
注意到 P t P_t Pt 与 R max R_{\max} Rmax 呈四次方根关系,因此单纯增加峰值功率效率极低。更有效的途径是采用脉冲压缩:在保持峰值功率不变的条件下,通过增大脉冲宽度 T T T 来增加发射能量,同时用大带宽保持距离分辨率,从而获得 T ⋅ B T \cdot B T⋅B 倍的SNR增益。
三、LFM脉冲压缩与距离分辨率
3.1 距离分辨率的矛盾
两个点目标能被区分的最小距离差为 Δ R = c / ( 2 B ) \Delta R = c / (2B) ΔR=c/(2B), B B B 为信号带宽。高分辨率需要大带宽,但大带宽通常意味着短脉冲,而短脉冲携带的能量低,探测距离受限。脉冲压缩正是为解决这一矛盾而生的技术。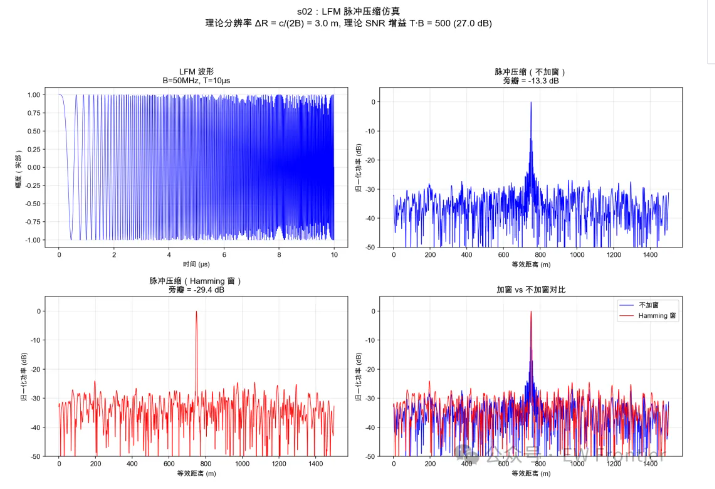
3.2 线性调频信号模型
线性调频(LFM)信号在一脉冲内频率线性变化:
s ( t ) = rect ( t T ) e j π K t 2 , K = ± B T s(t) = \text{rect}\left(\frac{t}{T}\right) e^{j\pi K t^2}, \quad K = \pm \frac{B}{T} s(t)=rect(Tt)ejπKt2,K=±TB
其中 T T T 为脉冲宽度, B B B 为带宽, K K K 为调频斜率。LFM的时宽带宽积 D = T ⋅ B D = T \cdot B D=T⋅B 决定了脉冲压缩的性能。
3.3 匹配滤波与压缩输出
匹配滤波器是最优线性检测器,其冲激响应为 h ( t ) = s ∗ ( − t ) h(t) = s^*(-t) h(t)=s∗(−t)。LFM的匹配滤波输出为:
∣ y ( τ ) ∣ = sin ( π B τ ) π B τ , ∣ τ ∣ ≤ T |y(\tau)| = \frac{\sin(\pi B \tau)}{\pi B \tau}, \quad |\tau| \le T ∣y(τ)∣=πBτsin(πBτ),∣τ∣≤T
输出脉冲宽度约为 1 / B 1/B 1/B,峰值幅度与输入相比放大了 D D D 倍。由于噪声功率仅随滤波器带宽线性增加, D D D**脉冲压缩的SNR增益恰好等于时宽带宽积 **(线性值),即 10 log 10 ( T B ) 10\log_{10}(TB) 10log10(TB) dB。
3.4 旁瓣抑制与加窗
匹配滤波输出的第一旁瓣电平为 − 13.2 -13.2 −13.2 dB,可能淹没弱目标。通过加窗(Hamming、Taylor等)可将旁瓣抑制到 − 40 -40 −40 dB以下,但主瓣会展宽约1.5倍,即以分辨率换取动态范围——这是雷达波形设计中永恒的基本权衡。
四、多普勒处理与MTD
4.1 多普勒频移与相参脉冲串
运动目标引入的多普勒频移为 f d = 2 v / λ f_d = 2v / \lambda fd=2v/λ( v v v 为径向速度,远离为正)。在一个相参处理间隔(CPI)内发射 N N N 个脉冲,第 n n n 个脉冲的回波除距离延迟外,还附加相位 ϕ n = 2 π f d n T PRI \phi_n = 2\pi f_d n T_{\text{PRI}} ϕn=2πfdnTPRI,其中 T PRI = 1 / PRF T_{\text{PRI}} = 1/\text{PRF} TPRI=1/PRF。将同一距离单元的 N N N 个脉冲回波按慢时间采样,得到一个复指数序列 x [ n ] = A e j 2 π f d n T PRI x[n] = A e^{j2\pi f_d n T_{\text{PRI}}} x[n]=Aej2πfdnTPRI。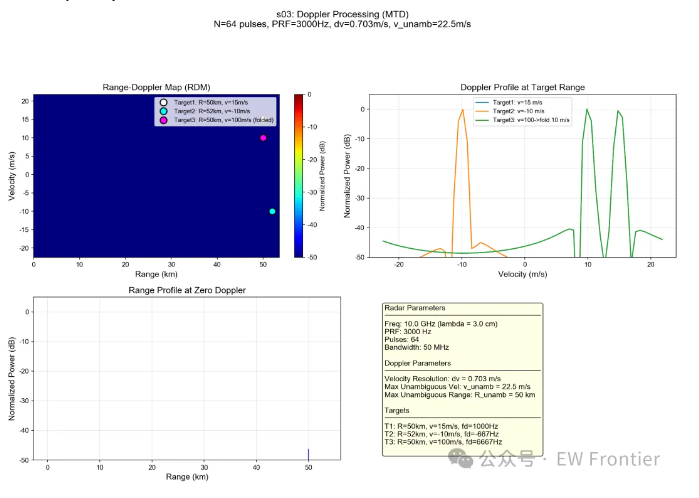
4.2 慢时间FFT与MTD
对该序列做FFT,不同 f d f_d fd 的能量会集中到不同的多普勒频点——这就是**动目标检测(MTD)**的基本原理。由FFT的瑞利限,频率分辨率为 Δ f = PRF / N \Delta f = \text{PRF}/N Δf=PRF/N,对应的速度分辨率为:
Δ v = λ 2 N T PRI = λ ⋅ PRF 2 N \Delta v = \frac{\lambda}{2 N T_{\text{PRI}}} = \frac{\lambda \cdot \text{PRF}}{2N} Δv=2NTPRIλ=2Nλ⋅PRF
增加脉冲数 N N N 可提高速度分辨率。将所有距离单元的慢时间FFT结果排列,即得到距离-多普勒矩阵(RDM),它是后续检测与跟踪的核心数据。
4.3 速度模糊与距离模糊
-
速度模糊:当 ∣ f d ∣ > PRF / 2 |f_d| > \text{PRF}/2 ∣fd∣>PRF/2 时发生折叠,最大不模糊速度为 v unamb = λ ⋅ PRF / 4 v_{\text{unamb}} = \lambda \cdot \text{PRF}/4 vunamb=λ⋅PRF/4。
-
距离模糊:最大不模糊距离为 R unamb = c / ( 2 ⋅ PRF ) R_{\text{unamb}} = c / (2 \cdot \text{PRF}) Runamb=c/(2⋅PRF)。
高PRF扩大 v unamb v_{\text{unamb}} vunamb 但缩小 R unamb R_{\text{unamb}} Runamb,低PRF则相反。这一矛盾通常通过多PRF工作模式或参差重频来解决。
五、CFAR恒虚警率检测
5.1 固定门限的缺陷
雷达接收噪声功率随环境(海况、雨衰、杂波)动态变化,固定检测门限会导致虚警率剧烈波动。**恒虚警率(CFAR)**技术利用检测单元周围的局部样本实时估计噪声功率,自适应调整门限,使虚警概率 P fa P_{\text{fa}} Pfa 保持恒定。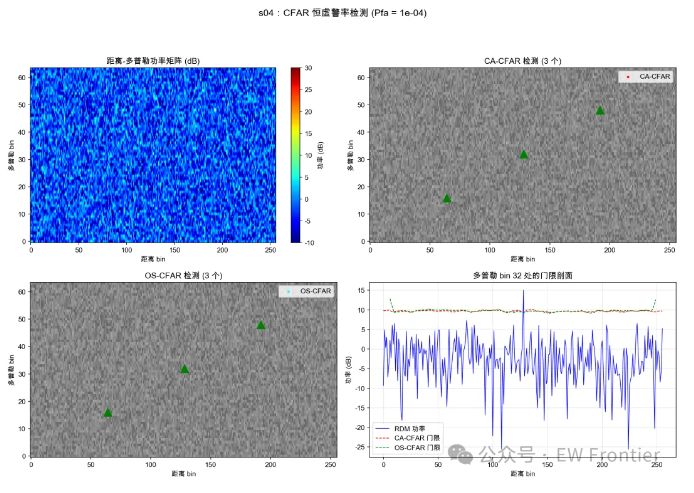
5.2 CA-CFAR
单元平均CFAR取训练单元的算术平均值作为噪声估计 Z = 1 N t ∑ i ∈ training x i Z = \frac{1}{N_t}\sum_{i\in\text{training}} x_i Z=Nt1∑i∈trainingxi,门限因子 α \alpha α 由下式确定:
α = N t ( P fa − 1 / N t − 1 ) \alpha = N_t \left( P_{\text{fa}}^{-1/N_t} - 1 \right) α=Nt(Pfa−1/Nt−1)
CA-CFAR在均匀噪声中为最优,但在多目标环境中,相邻强目标会抬高噪声估计,导致遮蔽效应。
5.3 OS-CFAR与改进型FCME
有序统计量CFAR(OS-CFAR)将训练单元功率排序,取第 k k k 个值(常用 k = 3 N t / 4 k = 3N_t/4 k=3Nt/4)作为噪声估计,对多目标遮蔽不敏感。改进型FCME(频域连续均值剔除)采用分段最小均值块初始化初始干净集,能有效对抗部分带干扰,即使干扰带宽较大时仍维持低虚警。
六、阵列信号处理:波束形成与超分辨测向
6.1 均匀线阵与导向矢量
由 N N N 个各向同性阵元组成均匀线阵(ULA),阵元间距 d d d 通常取 λ / 2 \lambda/2 λ/2。来自方向 θ \theta θ(相对法线)的平面波在第 n n n 个阵元上产生的相位差为 ϕ n = 2 π n d sin θ / λ \phi_n = 2\pi n d\sin\theta / \lambda ϕn=2πndsinθ/λ,导向矢量为:
a ( θ ) = [ 1 , e j 2 π d sin θ / λ , … , e j 2 π ( N − 1 ) d sin θ / λ ] T \mathbf{a}(\theta) = \left[1,\ e^{j2\pi d\sin\theta/\lambda},\ \ldots,\ e^{j2\pi (N-1)d\sin\theta/\lambda}\right]^T a(θ)=[1, ej2πdsinθ/λ, …, ej2π(N−1)dsinθ/λ]T
阵列因子(方向图)为 F ( θ ) = w H a ( θ ) F(\theta) = \mathbf{w}^H \mathbf{a}(\theta) F(θ)=wHa(θ)。均匀加权( w = 1 / N \mathbf{w} = \mathbf{1}/N w=1/N)的方向图呈sinc函数,主瓣3 dB宽度近似为 Δ θ 3 dB ≈ 0.886 λ / ( N d cos θ 0 ) \Delta\theta_{3\text{dB}} \approx 0.886\lambda/(Nd\cos\theta_0) Δθ3dB≈0.886λ/(Ndcosθ0)。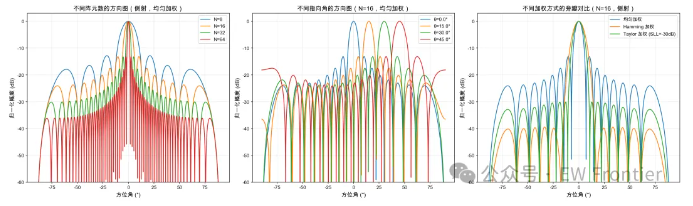
6.2 MVDR自适应波束形成
当存在强方向性干扰时,固定加权无法在干扰方向形成深零点。**最小方差无失真响应(MVDR)**波束形成器求解以下约束优化:
min w w H R w s.t. w H a ( θ s ) = 1 \min_{\mathbf{w}} \mathbf{w}^H \mathbf{R} \mathbf{w} \quad \text{s.t.} \quad \mathbf{w}^H \mathbf{a}(\theta_s) = 1 minwwHRws.t.wHa(θs)=1
最优权值为 w MVDR = R − 1 a ( θ s ) a H ( θ s ) R − 1 a ( θ s ) \mathbf{w}_{\text{MVDR}} = \dfrac{\mathbf{R}^{-1} \mathbf{a}(\theta_s)}{\mathbf{a}^H(\theta_s) \mathbf{R}^{-1} \mathbf{a}(\theta_s)} wMVDR=aH(θs)R−1a(θs)R−1a(θs),其中 R \mathbf{R} R 为包含干扰+噪声的协方差矩阵。MVDR可在干扰方向自适应形成深零点(>40 dB),同时保持目标方向增益不变,是空域抗干扰的有力工具。
6.3 MUSIC与ESPRIT超分辨测向
子空间类算法突破了瑞利限,实现角度超分辨。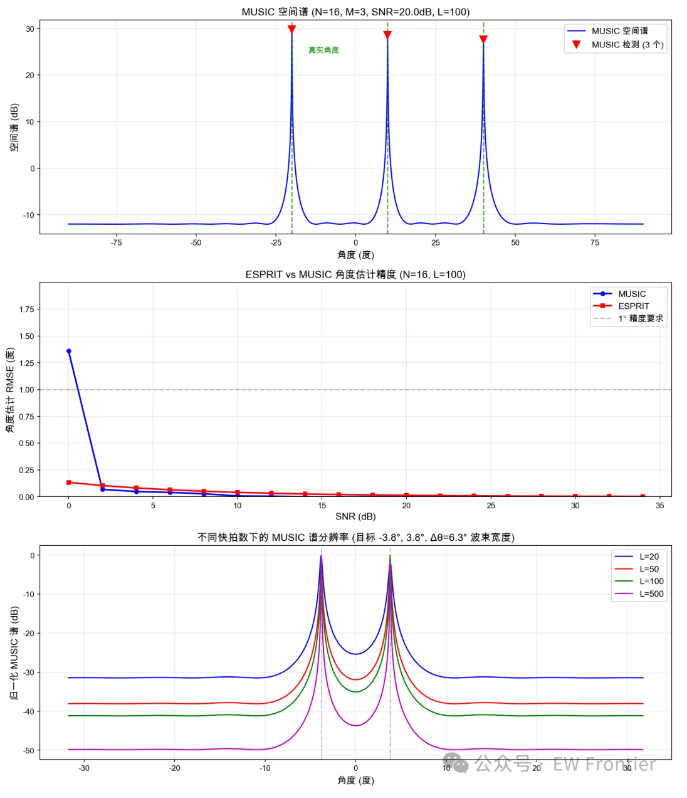
-
MUSIC:对 R \mathbf{R} R 特征分解,取噪声子空间 E n \mathbf{E}_n En(对应最小特征值),构造伪谱:
P MUSIC ( θ ) = 1 a H ( θ ) E n E n H a ( θ ) P_{\text{MUSIC}}(\theta) = \frac{1}{\mathbf{a}^H(\theta) \mathbf{E}_n \mathbf{E}_n^H \mathbf{a}(\theta)} PMUSIC(θ)=aH(θ)EnEnHa(θ)1
信号方向的导向矢量与噪声子空间正交,使分母趋近于零,谱峰尖锐。MUSIC的分辨率仅受限于信噪比和快拍数,不受阵列波束宽度限制。 -
ESPRIT:利用ULA的平移不变性,将阵列分为两个重叠子阵,通过求解旋转不变关系 Φ \mathbf{\Phi} Φ 的特征值直接计算角度,无需谱搜索,计算效率高于MUSIC。
七、动目标指示与空时自适应处理
7.1 MTI对消器
地面杂波集中在零多普勒附近。动目标指示(MTI) 通过相邻脉冲对消抑制静止杂波:
-
2脉冲对消器: y [ n ] = x [ n ] − x [ n − 1 ] y[n] = x[n] - x[n-1] y[n]=x[n]−x[n−1],传递函数 ∣ H ( f ) ∣ ∝ ∣ sin ( π f T PRI ) ∣ |H(f)| \propto |\sin(\pi f T_{\text{PRI}})| ∣H(f)∣∝∣sin(πfTPRI)∣。
-
3脉冲对消器: y [ n ] = x [ n ] − 2 x [ n − 1 ] + x [ n − 2 ] y[n] = x[n] - 2x[n-1] + x[n-2] y[n]=x[n]−2x[n−1]+x[n−2],零点更深,可抑制谱宽较大的杂波。
MTI不能抑制运动杂波(如雨杂波),且对运动目标的速度响应随 f d f_d fd 变化(盲速问题)。
7.2 机载雷达杂波的空时耦合
机载雷达下视时,地面杂波因平台运动而产生多普勒展宽,且多普勒频率与方位角耦合:
f d = 2 v λ cos ψ sin θ , f s = d λ sin θ f_d = \frac{2v}{\lambda} \cos\psi \sin\theta, \quad f_s = \frac{d}{\lambda}\sin\theta fd=λ2vcosψsinθ,fs=λdsinθ
其中 ψ \psi ψ 为擦地角, f s f_s fs 为空间频率。在空时二维平面上,杂波能量分布在一条狭长的杂波脊上,这是STAP设计的核心出发点。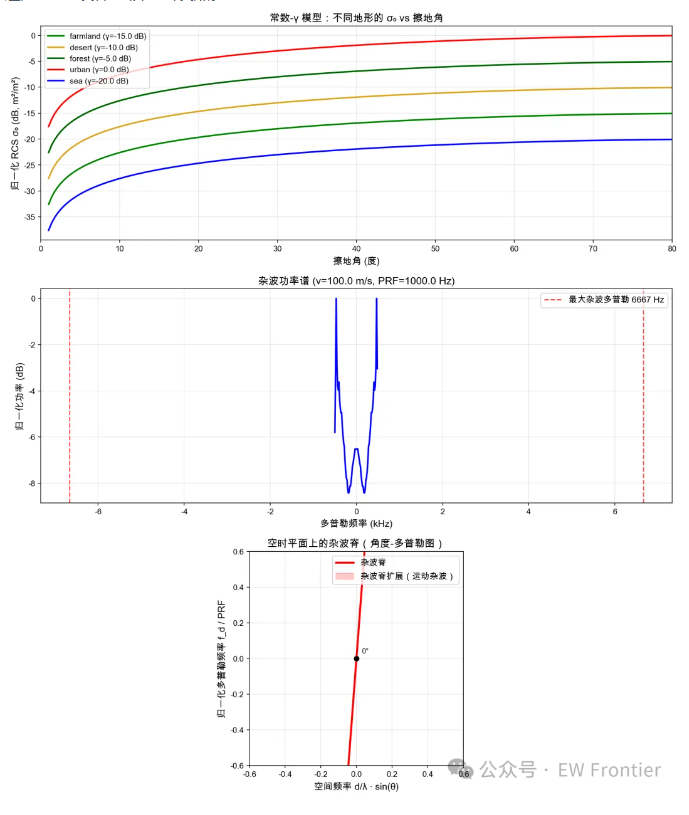
7.3 STAP基本原理
空时自适应处理(STAP) 联合空域(阵元)和时域(脉冲)二维自由度,在杂波脊方向自适应形成凹口。空时联合导向矢量为:
v ( θ , f d ) = a t ( f d ) ⊗ a s ( θ ) \mathbf{v}(\theta, f_d) = \mathbf{a}_t(f_d) \otimes \mathbf{a}_s(\theta) v(θ,fd)=at(fd)⊗as(θ)
其中 a t \mathbf{a}_t at 为时域导向矢量, ⊗ \otimes ⊗ 为Kronecker积。STAP权值与MVDR形式相同,但协方差矩阵 R \mathbf{R} R 包含杂波、干扰和噪声。全维STAP理论上可获得30–60 dB的改善因子,但计算复杂度为 O ( ( N P ) 3 ) O((NP)^3) O((NP)3),且需约 2 N P 2NP 2NP 个独立同分布训练样本,工程中常采用降维STAP(如mDT、多普勒滤波后自适应)。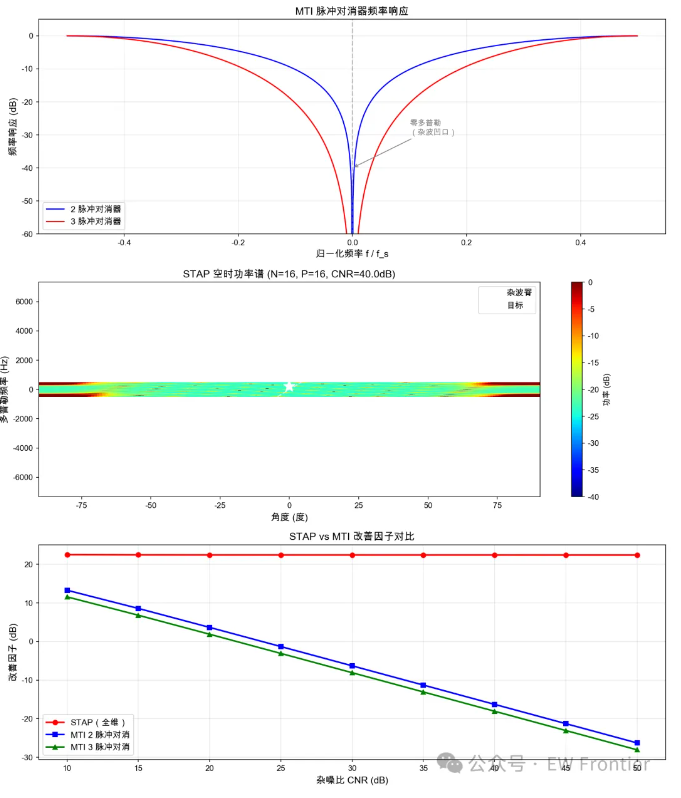
八、MIMO雷达与虚拟孔径扩展
8.1 正交波形分集
MIMO雷达的各发射阵元发射正交波形(如不同相位编码或OFDM子载波),接收端通过匹配滤波分离各发射通道的信号。于是, N t N_t Nt 个发射阵元和 N r N_r Nr 个接收阵元可等效为 N t × N r N_t \times N_r Nt×Nr 个虚拟阵元。对于ULA,若物理阵元间距为 d d d,则虚拟阵元间距为 d / 2 d/2 d/2,虚拟孔径扩展为 ( N t + N r − 1 ) d (N_t + N_r - 1)d (Nt+Nr−1)d。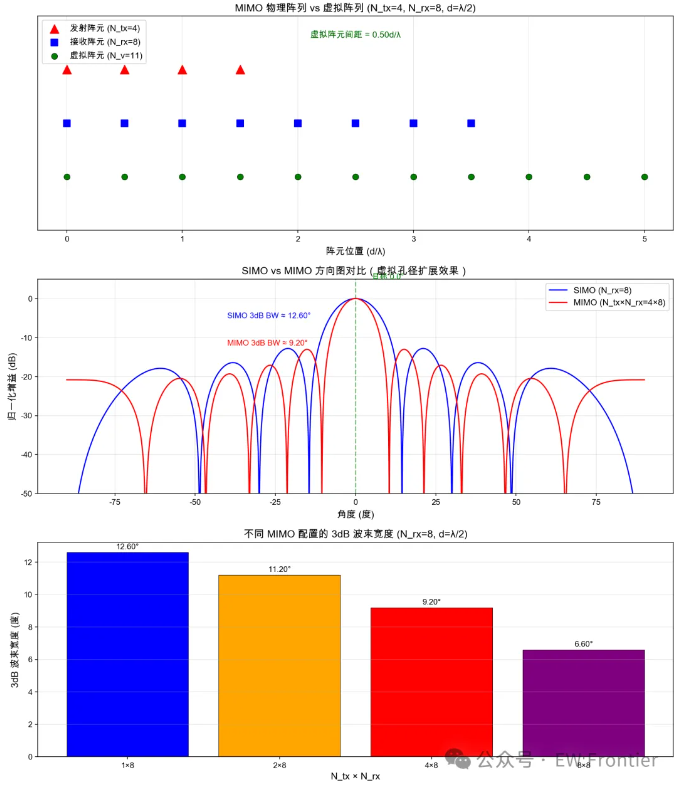
8.2 虚拟阵列方向图
虚拟阵列的导向矢量由所有虚拟阵元位置决定。由于虚拟阵元数远多于物理阵元数,MIMO雷达的方向图主瓣更窄、旁瓣更低,角分辨率显著优于传统相控阵。此外,正交波形还能提供波形分集增益,对抗目标闪烁和角闪烁。
8.3 信号的模糊函数与正交性
正交波形的自相关应具有低旁瓣,互相关应尽可能小。Barker码(最长13位)具有最优峰值旁瓣比 − 22.3 -22.3 −22.3 dB,但长度受限;Frank多相码和随机相位码可在任意长度下设计,但多普勒容限有所不同。OFDM波形通过子载波正交实现良好互相关,但其峰均比较高,需权衡。
九、波形设计:模糊函数与多载波体制
9.1 模糊函数
模糊函数 χ ( τ , ν ) \chi(\tau, \nu) χ(τ,ν) 定义为信号 s ( t ) s(t) s(t) 与其时延-多普勒副本的内积:
∣ χ ( τ , ν ) ∣ 2 = ∣ ∫ − ∞ ∞ s ( t ) s ∗ ( t − τ ) e j 2 π ν t d t ∣ 2 |\chi(\tau, \nu)|^2 = \left| \int_{-\infty}^{\infty} s(t) s^*(t-\tau) e^{j2\pi \nu t} dt \right|^2 ∣χ(τ,ν)∣2= ∫−∞∞s(t)s∗(t−τ)ej2πνtdt 2
它描述了信号在时延-多普勒平面上的分辨能力。理想的“图钉”形模糊函数具有主瓣尖窄、旁瓣平坦的特点,能同时实现高距离分辨率和高速度分辨率。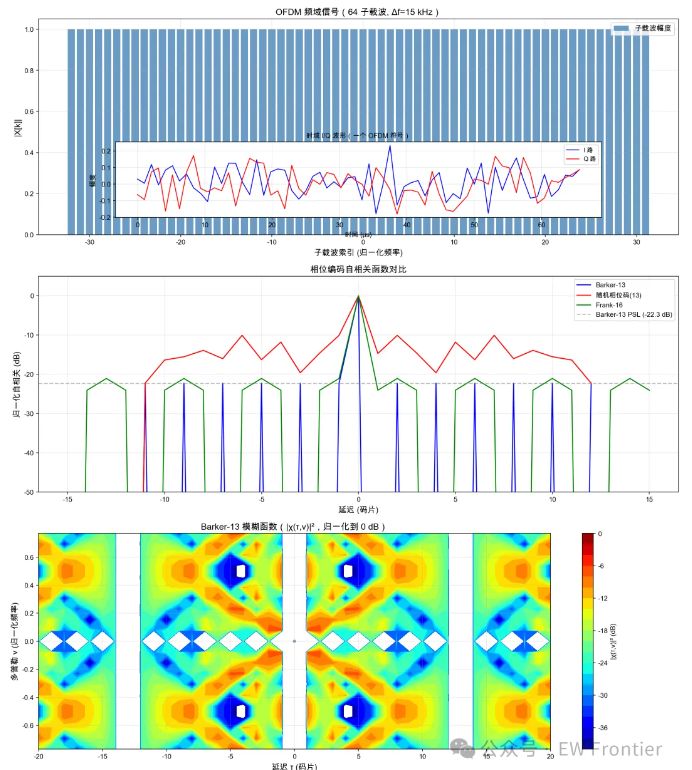
9.2 LFM的模糊函数
LFM信号的模糊函数呈斜刀刃形,其等值线为倾斜的椭圆。这意味着LFM在距离-多普勒耦合效应:距离测量误差会随目标速度变化而偏移,这是其固有的弱点。
9.3 OFDM波形
OFDM通过多个正交子载波并行传输,可在时延-多普勒域实现灵活的资源分配。其基带信号可表示为:
s ( t ) = ∑ k = 0 N − 1 X k e j 2 π k Δ f t , 0 ≤ t ≤ T sym s(t) = \sum_{k=0}^{N-1} X_k e^{j2\pi k \Delta f t}, \quad 0 \le t \le T_{\text{sym}} s(t)=∑k=0N−1Xkej2πkΔft,0≤t≤Tsym
子载波正交性保证了 ∫ s k ( t ) s m ∗ ( t ) d t = 0 \int s_k(t) s_m^*(t) dt = 0 ∫sk(t)sm∗(t)dt=0 当 k ≠ m k \neq m k=m。OFDM的模糊函数呈近似图钉形,且可通过子载波加权灵活控制旁瓣,因此被广泛应用于通信-感知一体化系统。
十、分布式雷达:多站融合与时间同步
10.1 多站定位与GDOP
利用多个接收站的距离测量进行多边定位。设站位置为 ( x i , y i ) (x_i,y_i) (xi,yi),测得距离为 R i R_i Ri,则:
( x − x i ) 2 + ( y − y i ) 2 = R i 2 (x - x_i)^2 + (y - y_i)^2 = R_i^2 (x−xi)2+(y−yi)2=Ri2
通过减去参考站线性化,最小二乘求解目标位置。几何精度因子(GDOP) 定义为:
GDOP = tr ( ( H T H ) − 1 ) \text{GDOP} = \sqrt{\text{tr}\big((\mathbf{H}^T\mathbf{H})^{-1}\big)} GDOP=tr((HTH)−1)
其中 H \mathbf{H} H 为方向余弦矩阵。目标位于站网中心时GDOP最小(最优几何),远离站网时GDOP急剧增大。定位RMSE约为 σ R ⋅ GDOP \sigma_R \cdot \text{GDOP} σR⋅GDOP, σ R \sigma_R σR 为测距误差标准差。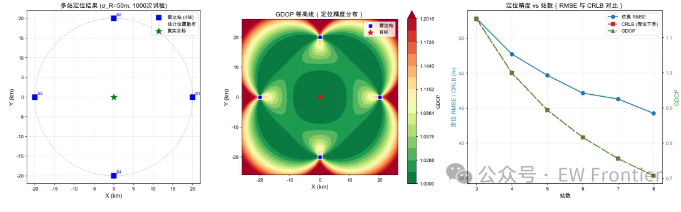
10.2 相参/准相参/非相参积累
分布式雷达可根据相位同步精度选择不同的融合策略:
-
全相参:各站信号直接相加,SNR增益 = 10 log 10 N 10\log_{10}N 10log10N dB(上界)。
-
准相参:先估计相位并补偿,残余相位误差 ϕ k \phi_k ϕk 的相干因子 γ = ∣ E [ e j ϕ ] ∣ \gamma = |\mathbb{E}[e^{j\phi}]| γ=∣E[ejϕ]∣,SNR增益 = 1 + ( N − 1 ) γ 2 1 + (N-1)\gamma^2 1+(N−1)γ2。对于高斯相位误差, γ = exp ( − σ ϕ 2 / 2 ) \gamma = \exp(-\sigma_\phi^2/2) γ=exp(−σϕ2/2)。
-
非相参:仅叠加功率,SNR无增益(0 dB),但鲁棒性最强。
10.3 PTP时间同步
IEEE 1588精确时间协议(PTP)通过主从双向消息交换测量时钟偏移和链路延迟:
offset = ( t 2 − t 1 ) − ( t 4 − t 3 ) 2 , delay = ( t 2 − t 1 ) + ( t 4 − t 3 ) 2 \text{offset} = \frac{(t_2 - t_1) - (t_4 - t_3)}{2}, \quad \text{delay} = \frac{(t_2 - t_1) + (t_4 - t_3)}{2} offset=2(t2−t1)−(t4−t3),delay=2(t2−t1)+(t4−t3)
其中 t 1 t_1 t1 为主站发同步时间戳, t 2 t_2 t2 为从站收同步时间戳, t 3 t_3 t3 为从站发延时请求时间戳, t 4 t_4 t4 为主站收延时请求时间戳。当上下行链路对称时,该公式精确给出时钟偏移。Allan方差是评估时钟稳定性(白频率噪声 vs 随机游走噪声)的标准工具,对分布式雷达的相位同步设计至关重要。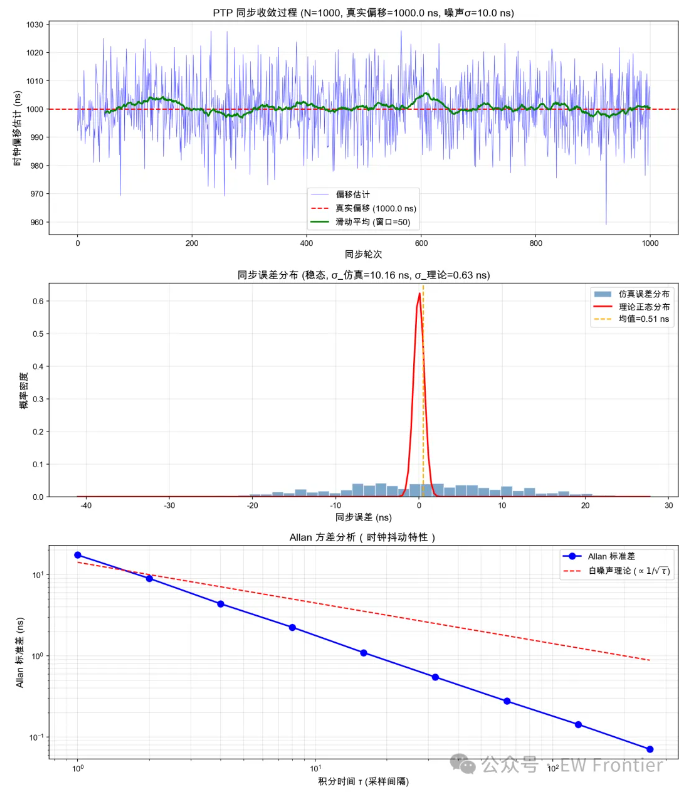
十一、总结与展望
本文从雷达方程出发,沿着发射波形、脉冲压缩、多普勒处理、CFAR检测、阵列空域处理、STAP、MIMO虚拟孔径、波形设计到分布式多站融合与同步的链路,系统梳理了雷达信号处理的核心理论体系。每个模块背后都有明确的物理约束与数学结构,它们共同构成了现代雷达系统的基础理论框架。
随着认知雷达、深度强化学习抗干扰以及通信感知一体化的兴起,雷达信号处理正从“固定模型”走向“数据驱动+模型驱动”的混合范式。然而,雷达方程、匹配滤波、模糊函数、克拉美-罗界、空时自适应处理等底层理论仍将作为不可替代的基石。希望本文能为从事雷达、通信与深度学习交叉领域的研究者提供一份清晰的理论地图,助力深入探索更智能、更协同的感知技术。
作者系雷达通信与深度学习领域研究者。本文为系列技术笔记之一,欢迎交流指正。
更多推荐
 5
5 0
0- 0



 已为社区贡献8条内容
已为社区贡献8条内容

所有评论(0)