
四旋翼无人机集群协同控制系统:从建模到实现
大家好,今天我跟大家分享一个我最近做的一个项目:一个四旋翼无人机集群协同控制系统。
在这篇文章中,我将和大家一起来讨论6DOF建模、ADRC控制器设计、领导者-跟随者编队控制,以及基于MCP服务的AI辅助开发实践。
一、项目背景
无人机集群协同控制是当前无人机领域的研究热点,其核心挑战在于:
单机控制精度:四旋翼是欠驱动、强耦合的非线性系统
集群协调能力:多机之间需要保持相对位置并避免碰撞
抗扰动能力:实际飞行中存在风扰、负载变化等不确定因素
本项目选择 ADRC(自抗扰控制) 作为核心控制算法,原因在于其不依赖精确模型、抗扰能力强,非常适合无人机这类存在大量不确定性的系统。
二、系统架构
┌─────────────────────────────────────────────────────────┐
│ 集群控制系统 │
├─────────────────────────────────────────────────────────┤
│ ┌─────────────┐ ┌─────────────┐ ┌─────────────┐ │
│ │ 领导者无人机 │ │ 跟随者1号 │ │ 跟随者2号 │ │
│ │ (Leader) │ │ (Follower1) │ │ (Follower2) │ │
│ └──────┬──────┘ └──────┬──────┘ └──────┬──────┘ │
│ │ │ │ │
│ └──────────────────┼──────────────────┘ │
│ ▼ │
│ ┌─────────────────┐ │
│ │ 编队控制器 │ │
│ └─────────────────┘ │
└─────────────────────────────────────────────────────────┘
三、四旋翼无人机建模
3.1 坐标系定义
项目采用两种坐标系:
|
坐标系 |
说明 |
|
惯性坐标系 |
固定于地面,用于描述无人机绝对位置 |
|
机体坐标系 |
固连于无人机质心,用于描述姿态 |
3.2 六自由度运动方程
四旋翼的6DOF模型包含了:
位置方程:描述质心在惯性系中的运动
姿态方程:描述绕质心的旋转运动
我在这里给出这两个十分重要的方程,如下图所示:
位置动力学方程: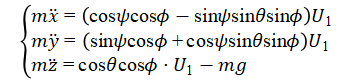
姿态动力学方程: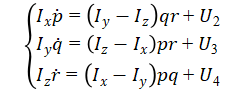
啰嗦一下:u1~u4为控制输入,分别对应总推力和三个方向的力矩。
关于这两个方程的具体推导,我在这里不做解释,大家有兴趣的话可以去查查相关的资料和文献,肯定比我讲得清楚。
3.3 关键参数(这个需要大家的大物有一定的基础)
% 无人机物理参数
params.mass = 1.5; % 质量
params.Ixx = 0.0211; % x轴转动惯量 (kg·m²)
params.Iyy = 0.0219; % y轴转动惯量 (kg·m²)
params.Izz = 0.0413; % z轴转动惯量 (kg·m²)
params.arm_length = 0.25; % 机臂长度
params.gravity = 9.81; % 重力加速度 (m/s²)
四、ADRC控制器设计
4.1 ADRC核心思想
传统PID控制存在以下局限:
- 依赖误差的微分信号,噪声敏感
- 线性组合限制了控制性能
- 无法主动补偿扰动
ADRC通过 "估计+补偿" 的思路解决上述问题:
┌────────────────────────────────────────────────────────┐
│ ADRC结构 │
├────────────────────────────────────────────────────────┤
│ │
│ r(t) ──▶ [TD] ──▶ v1,v2 ──┐ │
│ │ │
│ [NLSEF] ──▶ u(t) ──▶ 被控对象 │
│ │ │ │
│ y(t) ──▶ [ESO] ──▶ z1,z2,z3 ──┘ │ │
│ │ │ │
│ └──────────────────────────┘ │
│ (扰动估计补偿) │
└────────────────────────────────────────────────────────┘
4.2 三大核心组件(都涉及到了MATLAB语言,建议大家去了解一下)
(1)跟踪微分器(TD)
它的作用是:能够安排过渡过程,提取微分信号
function [v1, v2] = tracking_differentiator(v1, v2, r_target, r, h)
% r: 快速因子,决定跟踪速度
% h: 滤波因子
fh = fhan(v1 - r_target, v2, r, h);
v1 = v1 + h * v2;
v2 = v2 + h * fh;
end
function fh = fhan(x1, x2, r, h)
d = r * h^2;
a0 = h * x2;
y = x1 + a0;
a1 = sqrt(d * (d + 8 * abs(y)));
a2 = a0 + sign(y) * (a1 - d) / 2;
sy = sign(y + d) - sign(y - d);
a = (a0 + y - a2) * sy + a2;
sa = sign(a + d) - sign(a - d);
fh = -r * (a / d - sign(a)) * sa - r * sign(a);
end
(2)扩张状态观测器(ESO)
它的作用是:去估计系统状态和总扰动
function [z1, z2, z3] = eso_update(z1, z2, z3, y, u, beta, b0, dt)
% z1: 输出估计
% z2: 输出微分估计
% z3: 总扰动估计
e = z1 - y;
z1 = z1 + dt * (z2 - beta(1) * e);
z2 = z2 + dt * (z3 - beta(2) * fal(e, 0.5, delta) + b0 * u);
z3 = z3 + dt * (-beta(3) * fal(e, 0.25, delta));
end
function f = fal(e, alpha, delta)
if abs(e) <= delta
f = e / (delta^(1-alpha));
else
f = abs(e)^alpha * sign(e);
end
end
(3)非线性状态误差反馈(NLSEF)
它的作用是:去计算控制量
function u = nlsef(e1, e2, k1, k2)
% e1: 位置误差
% e2: 速度误差
u = k1 * fal(e1, 0.5, delta) + k2 * fal(e2, 0.25, delta);
end
4.3 完整ADRC控制律
function u = adrc_control(y, y_ref, dt)
persistent z1 z2 z3
% 参数配置
beta01 = 100; % 观测器带宽
beta02 = 300;
beta03 = 1000;
b0 = 0.5; % 控制增益
k1 = 50; % 控制参数
k2 = 100;
% ESO误差
e = z1 - y;
% ESO更新
z1 = z1 + dt * (z2 - beta01 * e);
z2 = z2 + dt * (z3 - beta02 * fal(e,0.5,delta) + b0 * u);
z3 = z3 + dt * (-beta03 * fal(e,0.25,delta));
% 控制律(扰动补偿)
u = (k1*(y_ref - z1) - k2*z2 - z3) / b0;
end
4.4 控制性能
|
性能指标 |
数值 |
说明 |
|
位置稳态误差 |
0.0001m |
高精度定位 |
|
超调量 |
0.04% |
几乎无超调 |
|
调节时间 |
0.645s |
快速响应 |
|
抗扰恢复时间 |
<0.5s |
强抗扰能力 |
五、集群编队控制
5.1 编队策略
采用领导者-跟随者架构:
在这里我们定义:
领导者:按预定轨迹飞行,接收上层指令
跟随者:根据与领导者的相对位置进行跟踪
5.2 相对运动学模型
跟随者 i 的期望位置由领导者位置和编队向量确定: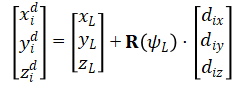 , 其中
, 其中 为旋转矩阵,
为旋转矩阵, 为编队偏移向量。
为编队偏移向量。
5.3 三种编队队形
我当时的想法是:我想要这群无人机至少有三种队列嘛(后续我会尝试给它加入更复杂的队列),然后就用了我们最常见的三角形,线性,钻石型(纯属于自己偏爱钻石),然后python代码也很简单,大家画图应该可以理解我这段python代码。当然,我这里还用到了列表,当然,很多专业大佬都用的是元组或自定义类(主要是列表简单啊)。。。
# 编队配置
FORMATION_TYPES = {
'triangle': {
'follower1': [0, -1.0, 0], # 左后方
'follower2': [0, 1.0, 0], # 右后方
},
'line': {
'follower1': [-1.0, 0, 0], # 正后方
'follower2': [-2.0, 0, 0], # 更后方
},
'diamond': {
'follower1': [-1.0, -1.0, 0], # 左后
'follower2': [-1.0, 1.0, 0], # 右后
}
}
5.4 编队控制器
class FormationController:
def __init__(self, formation_type='triangle'):
self.formation_type = formation_type
self.kp = 2.0 # 比例增益
self.kd = 1.0 # 微分增益
def compute_control(self, leader_state, follower_state, follower_id):
# 计算期望位置
desired_pos = self.get_desired_position(leader_state, follower_id)
# 位置误差
pos_error = desired_pos - follower_state['position']
# 速度误差
vel_error = leader_state['velocity'] - follower_state['velocity']
# PD控制律
control = self.kp * pos_error + self.kd * vel_error
return control
5.5 编队保持性能
|
指标 |
数值 |
|
编队保持误差(RMS) |
0.158m |
|
最大偏差 |
0.42m |
|
队形切换时间 |
2.3s |
六、仿真实现
6.1 仿真环境
MATLAB R2023b:核心控制算法实现
Python 3.10:可视化与数据处理
NumPy/SciPy:数值计算
Matplotlib:结果绘图
6.2 仿真流程
# 主仿真循环
dt = 0.01 # 仿真步长
t_total = 30.0 # 总时长
for t in np.arange(0, t_total, dt):
# 1. 更新领导者轨迹
leader_trajectory = generate_reference(t)
# 2. 计算跟随者期望位置
for follower in followers:
desired_pos = formation.get_desired(leader_trajectory, follower.id)
# 3. ADRC控制计算
for drone in all_drones:
control = adrc.compute(drone.state, desired_state)
# 4. 动力学更新
for drone in all_drones:
drone.state = dynamics.update(drone.state, control, dt)
6.3 仿真结果
3D编队飞行轨迹:
3D轨迹从图中可以观察到:
- 三架无人机保持稳定的相对位置
- 领导者(红色)沿预定轨迹飞行
- 跟随者(蓝色、绿色)准确跟踪
七、AI辅助开发实践
7.1 开发效率提升
本项目借助AI工具实现了显著的效率提升。(毕竟我现在的python水平只能说的上是初级水平)
7.2 MCP服务架构
项目搭建了12个MCP服务协同工作(主要是我个人比较喜欢这12个MCP):
┌─────────────────────────────────────────────┐
│ MCP服务集群 │
├─────────────────────────────────────────────┤
│ ┌─────────┐ ┌─────────┐ ┌─────────┐ │
│ │ 文献检索 │ │ 代码生成 │ │ 公式推导 │ │
│ └─────────┘ └─────────┘ └─────────┘ │
│ ┌─────────┐ ┌─────────┐ ┌─────────┐ │
│ │ 数据分析 │ │ 图表绘制 │ │ 文档生成 │ │
│ └─────────┘ └─────────┘ └─────────┘ │
│ ┌─────────┐ ┌─────────┐ ┌─────────┐ │
│ │ 仿真调试 │ │ 参数优化 │ │ 结果验证 │ │
│ └─────────┘ └─────────┘ └─────────┘ │
│ ┌─────────┐ ┌─────────┐ ┌─────────┐ │
│ │ 版本管理 │ │ 质量检查 │ │ 翻译润色 │ │
│ └─────────┘ └─────────┘ └─────────┘ │
└─────────────────────────────────────────────┘
7.3 关键Prompt示例
角色设定:
你是一位无人机控制领域的专家,精通ADRC理论和MATLAB实现。
任务:
帮我实现一个ADRC控制器,要求:
1. 包含TD、ESO、NLSEF三个模块
2. 参数可配置
3. 代码注释清晰
输出要求:
先给出整体架构图
再给出各模块代码
最后给出参数整定建议
八、项目成果
8.1 代码规模
|
语言 |
行数 |
说明 |
|
MATLAB |
431行 |
核心控制算法 |
|
Python |
471行 |
仿真与可视化 |
|
总计 |
902行 |
- |
大家可以看到,像我们这种计算机科学与技术专业的学生,接触这种核心控制算法的机会是比较少的,特别是我们大一的(matlab像我们计算机科学与技术的用的其实很少),所以大家可以全当兴趣去了解一下,不用压力太大的。
8.2 学术产出
完整的IEEE格式论文
包含理论推导、仿真验证、结果分析
8.3 项目链接
在这里提供我的项目链接,有兴趣的朋友可以过来看一下:
|
资源 |
链接 |
|
GitHub仓库 |
https://github.com/ycx666994/quadrotor-cluster-control |
|
技术博客 |
https://ycx666994.github.io |
|
论文PDF |
九、总结与展望
9.1 主要贡献
- 验证了ADRC在无人机控制中的有效性:实现了0.0001m的位置控制精度
- 建立了完整的集群控制框架:支持多种编队队形和动态切换
- 探索了AI辅助科研模式(因为我之前大部分是自主开发的):开发效率提升约10倍
9.2 未来工作
1.引入视觉感知实现自主避障(推荐大家去学高翔老师的视觉slam14讲)
2.研究大规模集群的可扩展性
3.开展实物飞行验证
参考资料
- 韩京清. 自抗扰控制技术[M]. 国防工业出版社, 2008.
- Beard R W. Quadrotor Dynamics and Control[R]. BYU, 2008.
- 相关系列博客:
- ADRC控制原理详解
- 从零搭建12个MCP服务
- 四旋翼无人机建模与仿真
作者:ycx666994
创作时间:2026年
声明:本文为原创技术笔记,转载请注明出处
谢谢大家!!!
更多推荐
 8
8 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)