
线性代数和数据挖掘(一):线性代数
人工智能中线性代数的相关内容
文章目录
前言
线性代数作为数学的重要分支,是计算机科学、机器学习、图形学等领域的基础工具。无论是数据降维、图像变换还是AI模型训练,都离不开向量、矩阵等核心概念的支撑。本文将系统梳理线性代数核心知识,拆解重难点,并结合Python代码实现实战,帮你真正掌握这门"工科数学语言"。本篇主要是阐述基本知识,方便之后的Numpy数组的学习
一、思维导图
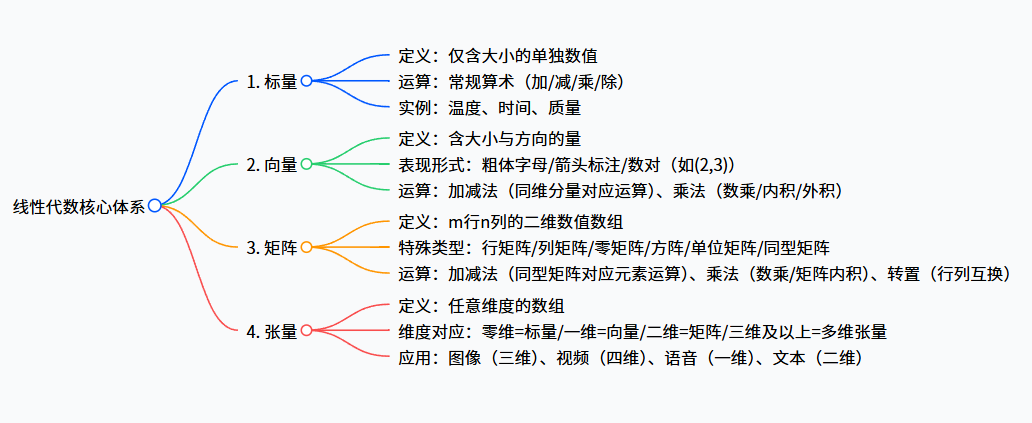
二、核心概念与运算详解
2.1 标量
标量是最简单的数学对象,仅包含大小,无方向属性,本质是一个单独的数,可分为整数、实数或复数。
在数学计算中,标量支持常规的算术运算,例如两个标量3和5,可进行3+5=8的加法运算、5-3=2的减法运算、3×5=15的乘法运算以及5÷3≈1.67的除法运算,运算规则与基础数学一致。
2.2 向量
2.2.1 表现形式
向量同时具备大小与方向,几何上可形象化为带箭头的线段——箭头指向代表方向,线段长度代表大小。数学表示中,向量常用粗体字母(如 a ⃗ \vec{a} a)或字母加箭头(如 a ⃗ \vec{a} a)标注,在空间直角坐标系中,还可表示为有序数对,例如平面直角坐标系中的(2,3)就是一个二维向量,三维空间中的(1,2,3)则是三维向量。
2.2.2 向量加减法
向量加减法有严格的前提条件:参与运算的向量必须是同维向量,即拥有相同数量的分量(如二维向量只能与二维向量运算,三维向量只能与三维向量运算)。
运算规则为"对应分量相加减":对于向量 a ⃗ = ( a 1 , a 2 , . . . , a n ) \vec{a}=(a_{1}, a_{2}, ..., a_{n}) a=(a1,a2,...,an)和 b ⃗ = ( b 1 , b 2 , . . . , b n ) \vec{b}=(b_{1}, b_{2}, ..., b_{n}) b=(b1,b2,...,bn),它们的和为 a ⃗ + b ⃗ = ( a 1 + b 1 , a 2 + b 2 , . . . , a n + b n ) \vec{a}+\vec{b}=(a_{1}+b_{1}, a_{2}+b_{2}, ..., a_{n}+b_{n}) a+b=(a1+b1,a2+b2,...,an+bn),差为 a ⃗ − b ⃗ = ( a 1 − b 1 , a 2 − b 2 , . . . , a n − b n ) \vec{a}-\vec{b}=(a_{1}-b_{1}, a_{2}-b_{2}, ..., a_{n}-b_{n}) a−b=(a1−b1,a2−b2,...,an−bn)。
实例:在平面直角坐标系中,若 A B → = ( 1 , 2 ) \overrightarrow{AB}=(1,2) AB=(1,2)、 A C → = ( 3 , 2 ) \overrightarrow{AC}=(3,2) AC=(3,2),则 A B → + A C → = ( 1 + 3 , 2 + 2 ) = ( 4 , 4 ) \overrightarrow{AB}+\overrightarrow{AC}=(1+3,2+2)=(4,4) AB+AC=(1+3,2+2)=(4,4)(对应向量 A D → \overrightarrow{AD} AD), A B → − A C → = ( 1 − 3 , 2 − 2 ) = ( − 2 , 0 ) \overrightarrow{AB}-\overrightarrow{AC}=(1-3,2-2)=(-2,0) AB−AC=(1−3,2−2)=(−2,0)(对应向量 A E → \overrightarrow{AE} AE)。
2.2.3 向量乘法
向量乘法分为三大类,具体规则与应用场景各不相同:
-
数乘(标量×向量)
本质是改变向量的大小与方向:用标量k乘以向量 a ⃗ \vec{a} a,向量的每个分量都乘以k。若k为正数,向量方向不变,大小变为原来的k倍;若k为负数,向量方向反转,大小变为原来的|k|倍。
实例: a ⃗ = ( 1 , 1 ) \vec{a}=(1,1) a=(1,1),数乘2后得到(2,2),数乘-2后得到(-2,-2)。 -
内积(点积,向量×向量)
运算结果为标量,公式为"对应分量乘积之和":对于 a ⃗ = ( x 1 , y 1 ) \vec{a}=(x_1,y_1) a=(x1,y1)和 b ⃗ = ( x 2 , y 2 ) \vec{b}=(x_2,y_2) b=(x2,y2),内积 a ⃗ ⋅ b ⃗ = x 1 x 2 + y 1 y 2 \vec{a}·\vec{b}=x_1x_2+y_1y_2 a⋅b=x1x2+y1y2。
实例: a ⃗ = ( 2 , 3 ) \vec{a}=(2,3) a=(2,3), b ⃗ = ( 4 , − 1 ) \vec{b}=(4,-1) b=(4,−1),则 a ⃗ ⋅ b ⃗ = 2 × 4 + 3 × ( − 1 ) = 8 − 3 = 5 \vec{a}·\vec{b}=2×4+3×(-1)=8-3=5 a⋅b=2×4+3×(−1)=8−3=5。
延伸应用:可通过内积计算两向量夹角,公式为 cos θ = a ⃗ ⋅ b ⃗ ∣ a ⃗ ∣ ∣ b ⃗ ∣ \cos\theta=\frac{\vec{a}·\vec{b}}{|\vec{a}||\vec{b}|} cosθ=∣a∣∣b∣a⋅b(其中 ∣ a ⃗ ∣ |\vec{a}| ∣a∣、 ∣ b ⃗ ∣ |\vec{b}| ∣b∣分别为两向量的模长)。 -
外积(叉积,向量×向量)
仅对三维向量有定义,运算结果为新向量:新向量方向垂直于原两向量组成的平面,大小等于原两向量组成平行四边形的面积。
计算规则:对于三维向量 A ⃗ = ( A x , A y , A z ) \vec{A}=(A_{x}, A_{y}, A_{z}) A=(Ax,Ay,Az)和 B ⃗ = ( B x , B y , B z ) \vec{B}=(B_{x}, B_{y}, B_{z}) B=(Bx,By,Bz),外积 A ⃗ × B ⃗ \vec{A}×\vec{B} A×B通过行列式计算:
A ⃗ × B ⃗ = ∣ i ⃗ j ⃗ k ⃗ A x A y A z B x B y B z ∣ \vec{A} × \vec{B}=\left|\begin{array}{ccc} \vec{i} & \vec{j} & \vec{k} \\ A_{x} & A_{y} & A_{z} \\ B_{x} & B_{y} & B_{z}\end{array}\right| A×B= iAxBxjAyBykAzBz
实例: a ⃗ = ( 2 , 3 , 0 ) \vec{a}=(2,3,0) a=(2,3,0), b ⃗ = ( 4 , − 1 , 0 ) \vec{b}=(4,-1,0) b=(4,−1,0),外积结果为 ( 3 × 0 − 0 × ( − 1 ) , 0 × 4 − 2 × 0 , 2 × ( − 1 ) − 3 × 4 ) = ( 0 , 0 , − 14 ) (3×0-0×(-1), 0×4-2×0, 2×(-1)-3×4)=(0,0,-14) (3×0−0×(−1),0×4−2×0,2×(−1)−3×4)=(0,0,−14)。
2.3 矩阵
2.3.1 基本定义
矩阵是由数字组成的二维数组,常用大写字母表示(如A),维度由行数m和列数n确定(记为m×n矩阵)。其数学表达式为:
A = ( a 11 a 12 ⋯ a 1 n a 21 a 22 ⋅ ⋅ a 2 n ⋮ ⋮ ⋱ ⋮ a m 1 a m 2 ⋯ a m n ) A=\left(\begin{array}{llll} a_{11} & a_{12} & \cdots & a_{1 n} \\ a_{21} & a_{22} & \cdot \cdot & a_{2 n} \\ \vdots & \vdots & \ddots & \vdots \\ a_{m 1} & a_{m 2} & \cdots & a_{m n} \end{array}\right) A=
a11a21⋮am1a12a22⋮am2⋯⋅⋅⋱⋯a1na2n⋮amn
其中 a i j a_{ij} aij代表矩阵A的第i行第j列元素,矩阵的每一行可视为行向量,每一列可视为列向量。
2.3.2 特殊类型矩阵
不同场景下,矩阵有多种特殊形式,核心类型如下:
| 类型 | 定义 | 示例(数学表达式) |
|---|---|---|
| 行矩阵 | 仅1行的矩阵(行向量) | [ a 1 a 2 a 3 ⋯ a n ] \left[\begin{array}{lllll}a_{1} & a_{2} & a_{3} & \cdots & a_{n}\end{array}\right] [a1a2a3⋯an] |
| 列矩阵 | 仅1列的矩阵(列向量) | [ a 1 a 2 ⋮ a n ] \begin{bmatrix} a_{1} \\ a_{2} \\ \vdots \\ a_{n} \end{bmatrix} a1a2⋮an |
| 零矩阵 | 所有元素均为0的矩阵 | [ 0 0 0 0 0 0 0 0 0 ] \left[\begin{array}{lll}0 & 0 & 0 \\ 0 & 0 & 0 \\ 0 & 0 & 0\end{array}\right] 000000000 |
| 方阵 | 行数=列数的矩阵(n阶方阵) | [ 1 2 3 1 2 3 1 2 3 ] \left[\begin{array}{lll}1 & 2 & 3 \\ 1 & 2 & 3 \\ 1 & 2 & 3\end{array}\right] 111222333 |
| 单位矩阵 | 主对角线元素为1,其余为0的方阵 | [ 1 0 0 0 1 0 0 0 1 ] \left[\begin{array}{lll}1 & 0 & 0 \\ 0 & 1 & 0 \\ 0 & 0 & 1\end{array}\right] 100010001 |
| 同型矩阵 | 行数、列数分别相等的矩阵 | A(3×3)与B(3×3)(如A= [ 1 2 3 4 5 6 7 8 9 ] \left[\begin{array}{lll}1 & 2 & 3 \\ 4 & 5 & 6 \\ 7 & 8 & 9\end{array}\right] 147258369 ,B= [ 9 8 7 6 5 4 3 2 1 ] \left[\begin{array}{lll}9 & 8 & 7 \\ 6 & 5 & 4 \\ 3 & 2 & 1\end{array}\right] 963852741 ) |
2.3.3 矩阵运算
-
加减法
前提条件:参与运算的矩阵必须是同型矩阵(行数、列数分别相等)。
运算规则:对应位置元素相加减,结果仍为同型矩阵。
实例:矩阵A= [ 1 2 3 4 5 6 7 8 9 ] \left[\begin{array}{lll}1 & 2 & 3 \\ 4 & 5 & 6 \\ 7 & 8 & 9\end{array}\right] 147258369 ,矩阵B= [ 9 8 7 6 5 4 3 2 1 ] \left[\begin{array}{lll}9 & 8 & 7 \\ 6 & 5 & 4 \\ 3 & 2 & 1\end{array}\right] 963852741 ,则A+B= [ 1 + 9 2 + 8 3 + 7 4 + 6 5 + 5 6 + 4 7 + 3 8 + 2 9 + 1 ] = [ 10 10 10 10 10 10 10 10 10 ] \left[\begin{array}{lll}1+9 & 2+8 & 3+7 \\ 4+6 & 5+5 & 6+4 \\ 7+3 & 8+2 & 9+1\end{array}\right]=\left[\begin{array}{lll}10 & 10 & 10 \\ 10 & 10 & 10 \\ 10 & 10 & 10\end{array}\right] 1+94+67+32+85+58+23+76+49+1 = 101010101010101010 。 -
乘法
矩阵乘法分为"数乘"和"矩阵内积"两类:- 数乘(常数×矩阵):将矩阵的所有元素乘以常数k,相当于对矩阵进行"缩放"。
实例:矩阵A= [ 1 2 3 4 5 6 7 8 9 ] \left[\begin{array}{lll}1 & 2 & 3 \\ 4 & 5 & 6 \\ 7 & 8 & 9\end{array}\right] 147258369 ,与常数2数乘后,结果为 [ 2 4 6 8 10 12 14 16 18 ] \left[\begin{array}{ccc}2 & 4 & 6 \\ 8 & 10 & 12 \\ 14 & 16 & 18\end{array}\right] 28144101661218 。 - 矩阵内积(矩阵×矩阵):前提条件是第一个矩阵的列数=第二个矩阵的行数,结果矩阵的行数=第一个矩阵的行数,列数=第二个矩阵的列数(记为 A m × n × B n × p = C m × p A_{m×n}×B_{n×p}=C_{m×p} Am×n×Bn×p=Cm×p)。
运算规则:结果矩阵C的第i行第j列元素 c i j c_{ij} cij,等于A的第i行与B的第j列对应元素乘积之和。
实例:A= [ 9 6 3 ] \left[\begin{array}{l}9 \\ 6 \\ 3\end{array}\right] 963 (3×1矩阵),B= [ 1 2 3 ] \left[\begin{array}{lll}1 & 2 & 3\end{array}\right] [123](1×3矩阵),则A×B= [ 9 × 1 9 × 2 9 × 3 6 × 1 6 × 2 6 × 3 3 × 1 3 × 2 3 × 3 ] = [ 9 18 27 6 12 18 3 6 9 ] \left[\begin{array}{ccc}9×1 & 9×2 & 9×3 \\ 6×1 & 6×2 & 6×3 \\ 3×1 & 3×2 & 3×3\end{array}\right]=\left[\begin{array}{ccc}9 & 18 & 27 \\ 6 & 12 & 18 \\ 3 & 6 & 9\end{array}\right] 9×16×13×19×26×23×29×36×33×3 = 9631812627189 。
注意:矩阵内积不满足交换律,即A×B≠B×A,甚至可能出现A×B可运算但B×A不可运算的情况。
- 数乘(常数×矩阵):将矩阵的所有元素乘以常数k,相当于对矩阵进行"缩放"。
-
转置
定义:将矩阵的行与列互换,得到的新矩阵称为原矩阵的转置矩阵(记为 A T A^T AT)。若原矩阵为m×n矩阵,转置后变为n×m矩阵。
实例:矩阵A= [ 1 2 3 4 5 6 ] \left[\begin{array}{ll}1 & 2 \\ 3 & 4 \\ 5 & 6\end{array}\right] 135246 (3×2矩阵),转置后为 [ 1 3 5 2 4 6 ] \left[\begin{array}{lll}1 & 3 & 5 \\ 2 & 4 & 6\end{array}\right] [123456](2×3矩阵)。
2.4 张量:超越二维的"多维数组"
张量是标量、向量、矩阵的推广,可表示任意维度的数组:
- 零维张量:即标量(单独的数);
- 一维张量:即向量(有序数值列表);
- 二维张量:即矩阵(二维数值阵列);
- 三维及以上张量:如三维张量可表示RGB彩色图像(维度为"高度×宽度×颜色通道"),四维张量可表示视频(维度为"时间×高度×宽度×颜色通道")。
在人工智能领域,张量是核心数据载体,应用场景包括:
- 数据表示:图像(三维)、视频(四维)、语音(一维,每个元素为时间点音频样本)、文本(二维,每行代表一个单词的向量);
- 参数存储:神经网络的权重、偏置以张量形式保存;
- 运算支撑:卷积神经网络的卷积操作、全连接层的矩阵乘法,均基于张量运算实现;
- 并行计算:张量运算适配GPU并行架构,是深度学习模型高效训练的基础。
三、重难点与常见误区解析
3.1 向量运算的核心误区
-
误区1:不同维度的向量可以进行加减法。
纠正:向量加减法要求"同维",例如二维向量(1,2)不能与三维向量(1,2,3)运算,否则会因分量数量不匹配导致结果无意义。 -
误区2:向量内积与外积混淆。
纠正:内积结果是标量,适用于计算夹角、投影等场景;外积仅对三维向量定义,结果是向量,适用于计算垂直方向、面积等场景,二者运算规则与应用场景完全不同。
3.2 矩阵乘法的关键注意事项
- 运算前提:必须满足"前矩阵列数=后矩阵行数",例如2×3矩阵只能与3×4矩阵相乘,不能与2×4矩阵相乘。
- 交换律问题:矩阵乘法不满足交换律,例如A×B和B×A的结果可能不同,甚至其中一个不可运算(如A为2×3矩阵,B为3×2矩阵,A×B为2×2矩阵,B×A为3×3矩阵,结果维度不同)。
- 与元素乘法的区别:矩阵内积是"行×列"运算,而元素乘法(Hadamard积)是对应位置元素相乘,二者逻辑完全不同,需根据需求选择正确运算方式。
四、总结
本文从基础到进阶梳理了线性代数的核心知识:标量是"单一数值",向量是"带方向的数值组合",矩阵是"二维数值阵列",张量是"多维数组推广"。四类对象的运算规则层层递进,且均有明确的几何意义与应用场景——无论是工程计算中的向量夹角求解,还是人工智能中的张量数据处理,都离不开这些基础理论的支撑。
掌握线性代数的关键在于"理解定义+熟练运算",建议结合实例反复练习向量、矩阵的核心运算,为后续深入学习数据科学、机器学习等领域打下坚实基础。
更多推荐

 20
20 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)