
YOLOv8【卷积创新篇·第23节】Transformer与卷积混合架构!
🏆 本文收录于 《YOLOv8实战:从入门到深度优化》,该专栏持续复现网络上各种热门内容(全网YOLO改进最全最新的专栏,质量分97分+,全网顶流),改进内容支持(分类、检测、分割、追踪、关键点、OBB检测)。且专栏会随订阅人数上升而涨价(毕竟不断更新),当前性价比极高,有一定的参考&学习价值,部分内容会基于现有的国内外顶尖人工智能AIGC等AI大模型技术总结改进而来,嘎嘎硬核。 ✨ 特惠福利
🏆 本文收录于 《YOLOv8实战:从入门到深度优化》,该专栏持续复现网络上各种热门内容(全网YOLO改进最全最新的专栏,质量分97分+,全网顶流),改进内容支持(分类、检测、分割、追踪、关键点、OBB检测)。且专栏会随订阅人数上升而涨价(毕竟不断更新),当前性价比极高,有一定的参考&学习价值,部分内容会基于现有的国内外顶尖人工智能AIGC等AI大模型技术总结改进而来,嘎嘎硬核。
✨ 特惠福利:目前活动一折秒杀价!一次订阅,永久免费,所有后续更新内容均免费阅读!
全文目录:
⏩ 摘要
欢迎来到《YOLOv8专栏》卷积创新篇的第23节!在本章中,我们将踏上一段激动人心的探索之旅,深入研究如何将计算机视觉领域的两大巨头——卷积神经网络(CNN)与Transformer进行有机融合。CNN以其卓越的局部特征提取能力和强大的归纳偏置(Inductive Bias)而闻名,而Transformer则凭借其无与伦比的全局上下文建模能力,在自然语言处理和视觉领域掀起了革命。当“精于局部”的CNN遇上“洞悉全局”的Transformer,会产生怎样强大的协同效应?
本文将从CNN与Transformer的核心思想与局限性出发,系统性地阐述二者结合的必要性与优势。我们将详细探讨几种主流的混合架构设计策略,并重点聚焦于如何在YOLOv8这一顶尖的目标检测框架中,设计并实现一个高效的卷积-Transformer混合模块。您将学习到如何从零开始构建一个Transformer编码器层,并将其无缝集成到YOLOv8的C2f结构中,打造一个全新的C2f_Transformer模块。
我们将提供完整、可运行且带有详尽中文注释的PyTorch代码,手把手带您完成从模块定义、模型配置文件修改到最终训练的全过程。此外,文章还将深入讨论实验设计、性能评估指标,并通过假设的实验结果与特征可视化分析,直观地展示混合架构带来的潜在优势与性能权衡。最后,我们将对本次学习进行总结,并展望未来更先进的融合技术。准备好了吗?让我们即刻启程,探索YOLOv8的无限可能!✨
⏩ 上期回顾:探索架构的“最优解”——神经网络架构搜索(NAS)
在上一节 《YOLOv8【卷积创新篇·第22节】Neural Architecture Search卷积搜索》 中,我们一同探索了深度学习领域中一项非常“黑科技”的技术——神经网络架构搜索(NAS)。我们学习到,NAS致力于将网络结构的设计过程自动化,通过精心设计的搜索空间、搜索策略和性能评估策略,让算法代替人类专家去发现更高性能、更高效的网络结构。从基于强化学习、进化算法到更高效的可微分方法(Darts),我们见证了NAS如何“智能”地设计出如EfficientNet、NAS-FPN等一系列优秀的网络。
NAS的探索为我们打开了一扇全新的大门,它告诉我们,网络结构本身存在着巨大的优化空间。而今天,我们将要探讨的卷积与Transformer混合架构,正是近年来由人类专家设计并被证明极为成功的一种创新思路,它同样可以被视为在广阔的“架构搜索空间”中,一个极其重要的、值得深入研究的“璀璨明星”分支。可以说,上一节的NAS为我们提供了自动寻找优秀架构的“方法论”,而本节则是聚焦于一种具体且强大的“设计范式”。让我们带着对架构优化的深刻理解,进入今天的主题吧!🧠
⏩ 引言:当“局部专家”遇见“全局战略家”
0.1 视觉世界的两大支柱:CNN 与 Transformer
自AlexNet在2012年ImageNet竞赛中一鸣惊人以来,卷积神经网络(CNN)便开启了其在计算机视觉领域长达十年的“统治”时代。从图像分类、目标检测到语义分割,CNN凭借其精心设计的局部感受野、权值共享和空间下采样等机制,展现出了对视觉信息无与伦比的建模能力。它就像一位技艺精湛的工匠,逐层地从像素中提取边缘、纹理、部件,并最终组合成对整个物体的理解。这种自底向上的、层次化的特征提取方式,非常符合人类视觉系统的认知机理。
然而,在2017年,一篇名为《Attention Is All You Need》的论文在自然语言处理(NLP)领域投下了一颗“重磅炸弹”,Transformer模型横空出世。它完全摒弃了传统的循环(RNN)和卷积结构,仅用 自注意力机制(Self-Attention) 就实现了最先进的性能。自注意力机制的核心思想在于,它能够计算序列中任意两个元素之间的依赖关系,从而捕获长距离的、全局的上下文信息。这好比一位运筹帷幄的战略家,能够洞察全局,理解每个部分在整体中的作用和联系。
很快,这股Transformer的浪潮便席卷到了计算机视觉领域。Vision Transformer (ViT) 的出现证明了,纯粹的Transformer架构在有足够数据预训练的情况下,也能在图像分类任务上媲美甚至超越CNN。
0.2 为什么需要融合?1 + 1 > 2 的奥秘
既然CNN和Transformer都如此强大,我们为何还要费心将它们融合在一起呢?答案在于:它们各自的优势恰好能弥补对方的不足。
-
CNN的优势与短板:
- 优势:具有强大的归纳偏置(Inductive Bias)。局部性(Locality) 假设像素点的关系主要存在于邻近区域,平移等变性(Translation Equivariance) 假设物体无论出现在图像的哪个位置,其特征都应相同。这些先验知识使得CNN在数据量有限的情况下也能快速、高效地学习视觉模式。
- 短板:它的“近视”问题。由于卷积核的尺寸是固定的,CNN需要通过堆叠非常多的层才能获得较大的感受野,以捕获全局信息。这种方式间接且效率不高,对于理解需要长距离依赖关系的复杂场景(例如,判断图片中一只猫和远处的一个毛线球的关系)力不从心。
-
Transformer的优势与短板:
- 优势:强大的全局上下文建模能力。自注意力机制直接计算图像中所有Patch之间的关系,天然具有全局感受野,能够轻松捕获长距离依赖,非常适合进行关系推理和高级语义理解。
- 短板:缺乏视觉的归纳偏置。它将图片切分成小块(Patch)后一视同仁,丢失了像素间的二维空间结构信息(需要靠位置编码弥补),并且对平移、缩放等变换非常敏感。这导致它在训练初期学习效率较低,通常需要海量的训练数据(如JFT-300M)才能学到通用的视觉特征。此外,自注意力机制的计算复杂度与输入序列长度(即图片Patch数量)成二次方关系,处理高分辨率图像时计算开销巨大。
因此,一个自然而然的想法诞生了:让CNN和Transformer强强联合,优势互补。
融合的核心思想:利用CNN在网络浅层高效地学习低阶的、局部的视觉特征(如边缘、纹理),并利用其下采样能力逐步降低特征图的分辨率,减少计算量。然后,在网络的深层,当特征图尺寸变小、语义信息更丰富时,引入Transformer模块,利用其全局建模能力来捕捉高级语义特征和长距离依赖关系。
这种混合架构,既保留了CNN的数据高效性和强大的局部特征提取能力,又引入了Transformer的全局上下文理解能力,最终实现 1 + 1 > 2 的性能飞跃。这正是我们本章要在YOLOv8中探索和实践的核心方向!
⏩ 第一章:深度剖析:CNN的“近视”与Transformer的“远见”
在动手改造YOLOv8之前,我们必须深刻理解这两种架构的内在机理。只有知其然,并知其所以然,我们才能做出最合理的设计决策。
1.1 CNN的核心武器:局部性与平移不变性
CNN的成功,很大程度上归功于它巧妙地将人类视觉处理的先验知识融入了网络结构中。
-
局部感受野 (Local Receptive Fields):卷积操作通过一个小的卷积核(如3x3, 5x5)在输入特征图上滑动。每个神经元只与前一层的一个局部区域相连。这个设计基于一个强大的假设:空间上相邻的像素点关联性更强。这使得网络可以首先关注到图像的局部结构,如边缘和角点。
-
权值共享 (Weight Sharing):一个卷积核(滤波器)在整个输入特征图上是共享的。这意味着,无论图像的哪个位置,网络都用同一组参数去检测同一种特征(比如一个水平边缘)。这极大地减少了模型的参数量,并使得网络具有平移等变性 (Translation Equivariance)。即,如果输入图像中的物体发生平移,其在输出特征图中的表示也会相应平移,但特征本身不会改变。
1.2 CNN的局限:难以逾越的感受野鸿沟
尽管CNN可以通过堆叠层来扩大感受野,但这种增长是线性的、缓慢的。一个拥有L层、卷积核大小为K的CNN,其理论感受野大小约为 L * (K - 1) + 1。为了捕获全局信息,网络需要变得非常深,这带来了梯度消失/爆炸和计算成本激增的问题。
虽然空洞卷积(Dilated Convolution)和注意力机制(如SE-Net, CBAM)等技术可以在一定程度上缓解这个问题,但它们仍然是在卷积的框架内进行优化。对于需要像素级长距离依赖建模的任务,CNN依然显得力不从心。我们称之为CNN的“近视”特性。
1.3 Transformer的崛起:自注意力的全局视野
Vision Transformer (ViT) 提供了一种全新的范式。它首先将输入图像 x ∈ R^(H×W×C) 展平成一系列展平的2D图像块(Patches) x_p ∈ R^(N×(P^2·C)),其中 (H, W) 是原始图像分辨率,C 是通道数,(P, P) 是每个图像块的分辨率,N = HW/P^2 是图像块的数量,也即输入序列的有效长度。
然后,ViT的核心——多头自注意力(Multi-Head Self-Attention, MHSA)——登场了。对于每一个图像块(Patch),自注意力机制会计算它与所有其他图像块的关联权重。
其计算过程可以简化为:
-
生成Q, K, V向量:对每个输入块的特征向量,通过三个独立的线性变换,生成查询(Query)、键(Key)和值(Value)三个向量。
-
计算注意力得分:用每个块的Query向量去和所有其他块的Key向量进行点积,得到注意力分数。这个分数衡量了“我(Query)应该对你(Key)投入多少注意力”。
Attention ( Q , K , V ) = softmax ( Q K T d k ) V \text{Attention}(Q, K, V) = \text{softmax}\left(\frac{QK^T}{\sqrt{d_k}}\right)V Attention(Q,K,V)=softmax(dkQKT)V
-
加权求和:将注意力分数作为权重,对所有块的Value向量进行加权求和,得到该块融合了全局信息后的新表示。
由于每个块都与所有块进行了交互,MHSA天然地拥有了全局感受野,能够一步到位地捕捉图像中任意两个位置之间的长距离依赖。我们称之为Transformer的“远见”。
1.4 Transformer的挑战:计算复杂性与数据依赖
Transformer的“远见”并非没有代价。
- 二次方计算复杂度:自注意力的计算复杂度为
O(N^2·d),其中N是序列长度(图像块数量),d是特征维度。当输入图像分辨率增大时,N会急剧增加,导致计算量和内存占用呈二次方增长。这使得Transformer在高分辨率视觉任务中直接应用变得非常昂贵。 - 缺乏归纳偏置:如前所述,Transformer缺乏CNN那样的局部性和平移等变性等先验知识。这使得它需要从头学习这些非常基础的视觉规律,因而对大规模预训练数据集的依赖性很强。
正是这些优缺点的鲜明对比,让CNN与Transformer的融合显得如此充满前景和必要性。
⏩ 第二章:YOLOv8混合架构的设计哲学
明确了理论基础后,我们来思考如何在强大的YOLOv8框架中进行具体的融合设计。这需要我们像一位架构师一样,仔细考量“手术”的位置和方式。
2.1 融合策略:我们可以在哪里“动手术”?
YOLOv8的经典结构分为三大部分:主干网络(Backbone)、颈部网络(Neck)和检测头(Head)。
- Backbone: 负责从输入图像中提取不同层次的特征。通常由一系列卷积和下采样层组成,随着网络的加深,特征图尺寸变小,但语义信息增强。
- Neck: 如PANet结构,负责融合来自Backbone不同阶段的特征,实现高层语义信息与底层定位信息的结合。
- Head: 负责在融合后的特征图上进行最终的分类和边界框回归预测。
基于这个结构,我们可以有以下几种主流的融合策略:
2.1.1 在主干网络(Backbone)的深层引入 (最主流)
这是最常见、最直接也通常最有效的方法。
-
思路:在Backbone的前几个阶段(如C1, C2, C3),我们完全保留CNN(如YOLOv8的
C2f模块)的结构。因为在网络的浅层,模型主要学习边缘、纹理等局部信息,这正是CNN的强项,且效率极高。随着特征图经过多次下采样,分辨率降低(例如到了C4, C5阶段),此时引入Transformer模块。 -
优势:
- 计算效率:在低分辨率的特征图上应用Transformer,可以有效规避其二次方复杂度的瓶颈。
- 特征质量:此时的特征已经经过了CNN的初步提炼,是高度浓缩的语义信息,更适合Transformer进行全局关系建模。
- 实现简单:只需将最后几个
C2f模块替换为我们设计的混合模块即可,对整体架构改动较小。
-
代表工作:BoTNet (Bottleneck Transformers for Visual Recognition) 就是一个典型的例子,它将ResNet最后几个Bottleneck块中的3x3卷积替换为了多头自注意力层。
在本篇文章的实战环节,我们将采用这种策略。
2.1.2 在颈部网络(Neck)中增强跨尺度融合
- 思路:保持Backbone为纯CNN结构,在Neck部分(如PANet)引入Transformer。Neck的核心任务是融合不同尺度的特征。Transformer的全局建模能力可以帮助模型更好地理解不同尺度特征之间的关联,比如一个小物体和一个大物体之间的上下文关系。
- 优势:可以增强多尺度特征的表征能力,可能对检测不同尺寸的物体,特别是上下文关联强的物体有帮助。
- 挑战:Neck部分的特征图分辨率相对较高,需要设计更高效的Transformer变体(如Swin Transformer)来控制计算量。
2.1.3 设计独立的混合Stem层
- 思路:在网络的最初阶段(Stem,即第一个卷积层之后),就使用卷积和Transformer的组合。例如,CoAtNet (Co-Scale Conv-Attentional Image Transformers) 就探索了这种方式。
- 优势:可以在很早的阶段就开始进行全局信息的交互。
- 挑战:在原始高分辨率图像上直接应用Transformer计算成本极高,需要非常精巧的设计。
2.2 核心模块设计:构建C2f_Transformer
既然我们决定在YOLOv8主干网络的深层进行改造,我们的核心任务就是设计一个可以替代C2f模块的混合模块。C2f是YOLOv8的核心模块之一,它借鉴了ELAN和C3的思想,具有丰富的梯度流路径。我们可以在保持其大体结构不变的基础上,将部分卷积瓶颈块(Bottleneck)替换为Transformer编码器层。我们将其命名为 C2f_Transformer。
2.2.1 模块的宏观结构
C2f模块的大致流程是:
- 一个初始的卷积层处理输入。
- 将结果在通道维度上分割(split)成两部分。
- 其中一部分通过一系列的
Bottleneck块进行深度处理。 - 将处理后的结果与之前分割的另一部分以及中间过程的输出进行拼接(concat)。
- 最后通过一个卷积层进行输出。
我们的C2f_Transformer将沿用这个思想,但做出关键改动:将C2f中的Bottleneck序列的最后一个或几个,替换为我们自定义的TransformerLayer。
这样做的好处是:特征流首先经过几个卷积瓶颈块,提取了稳健的局部特征,然后交由TransformerLayer进行全局上下文的增强。
2.2.2 Transformer编码器层的微观实现
一个标准的Transformer编码器层(我们称之为TransformerLayer)包含两个核心子层:
- 多头自注意力 (Multi-Head Self-Attention, MHSA):负责捕捉全局空间关系。
- 前馈网络 (Feed-Forward Network, FFN):通常由两个线性层和一个激活函数(如GELU)组成,负责对MHSA输出的特征进行非线性变换和增强。
此外,每个子层前后都伴随着残差连接 (Residual Connection) 和 层归一化 (Layer Normalization, LN),这对于稳定训练和加深网络至关重要。
在应用于2D图像特征图时,我们需要做一个小小的适配:
- 输入的特征图形状为
(B, C, H, W)。 - 在送入MHSA之前,需要将其Reshape并Permute为
(B, N, C),其中N = H * W是序列长度。 - MHSA处理完毕后,再将其Reshape回
(B, C, H, W)的形状,以便后续的卷积操作。
2.2.3 使用Mermaid绘制模块结构图入的特征图形状为 (B, C, H, W)。
- 在送入MHSA之前,需要将其Reshape并Permute为
(B, N, C),其中N = H * W是序列长度。 - MHSA处理完毕后,再将其Reshape回
(B, C, H, W)的形状,以便后续的卷积操作。
2.2.3 使用流程图绘制模块结构图
下面是C2f_Transformer模块的结构示意图,可以清晰地看到卷积与Transformer的结合过程。
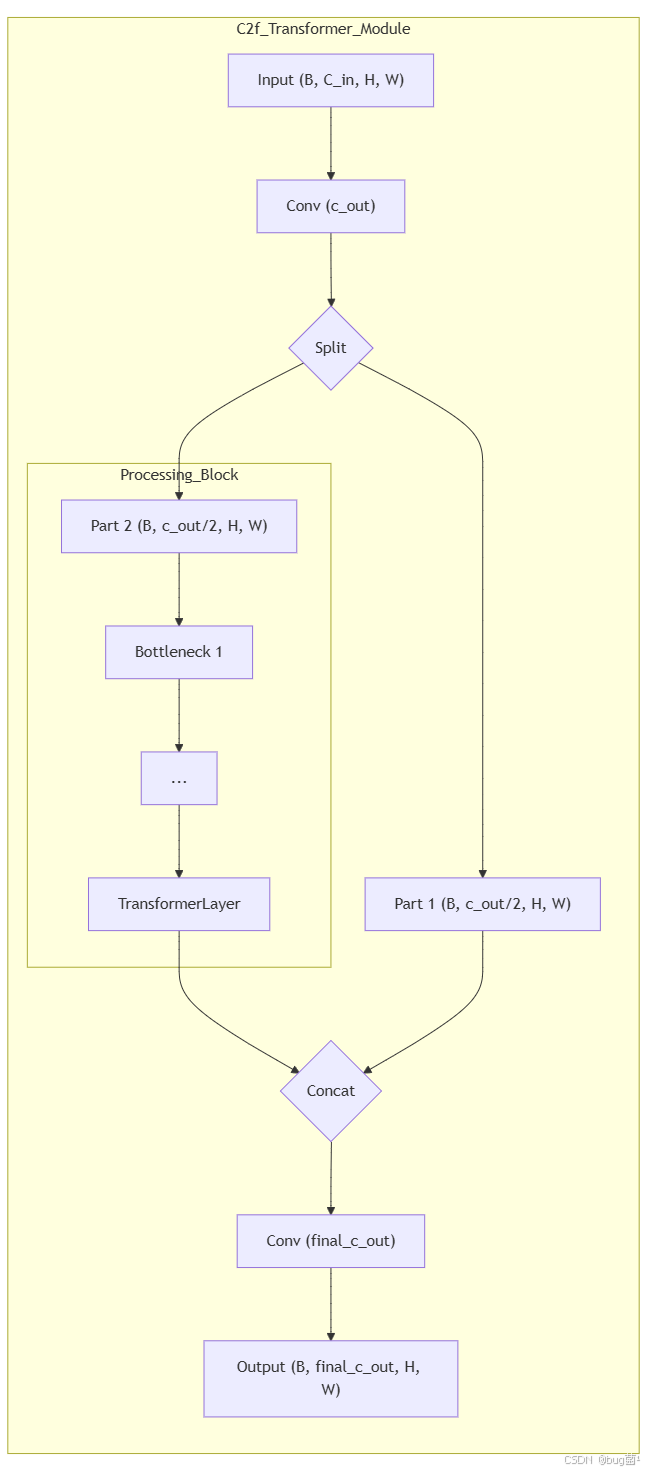
图解:
- 输入特征图首先经过一个卷积层进行通道变换。
- 变换后的特征图被分割成两路。
- 一路(Part 2)进入核心处理块,它由若干个传统的
Bottleneck块和一个我们新加的TransformerLayer组成。这体现了先局部后全局的思想。 - 另一路(Part 1)作为“捷径”连接。
- 处理后的特征与捷径特征进行拼接,最后通过一个卷积层整合信息并输出。
这个设计既保留了C2f模块多梯度路径的优点,又成功地将Transformer的全局建模能力嵌入其中。
⏩ 第三章:代码实战:让YOLOv8拥有Transformer之眼
理论讲了这么多,是时候动手实践了!💻 本章我们将一步步地实现C2f_Transformer模块,并将其集成到YOLOv8的模型中。请确保你已经安装了ultralytics包和torch。
3.1 步骤一:定义核心 TransformerLayer
首先,我们需要创建一个TransformerLayer.py文件,或者直接在YOLOv8项目的ultralytics/nnmodules/目录下添加这个模块的定义。这个类将实现我们之前讨论的MHSA、FFN、LN和残差连接。
# ultralytics/nn/modules/transformer.py (新建或添加到已有文件中)
import torch
import torch.nn as nn
import math
class TransformerLayer(nn.Module):
"""
Transformer编码器层,包含了多头自注意力机制和前馈神经网络。
该模块设计用于处理2D特征图,可集成到CNN架构中。
"""
def __init__(self, c, num_heads):
"""
初始化TransformerLayer。
参数:
c (int): 输入和输出的通道数 (dimensions)。
num_heads (int): 多头注意力机制中的头数。
"""
super().__init__()
# --- 多头自注意力机制 (Multi-Head Self-Attention) ---
# LayerNorm对输入的通道维度进行归一化
self.ln1 = nn.LayerNorm(c)
# 多头自注意力模块
self.attn = nn.MultiheadAttention(embed_dim=c, num_heads=num_heads, batch_first=True)
# --- 前馈神经网络 (Feed-Forward Network) ---
# LayerNorm
self.ln2 = nn.LayerNorm(c)
# 前馈网络,通常由两个线性层和一个激活函数组成
self.ffn = nn.Sequential(
nn.Linear(c, c * 4), # 扩展维度
nn.GELU(), # 使用GELU激活函数
nn.Linear(c * 4, c), # 恢复维度
)
def forward(self, x):
"""
前向传播函数。
输入 x 的形状应为 (B, C, H, W)。
"""
# --- 1. 保存原始输入用于残差连接 ---
identity = x
# --- 2. 处理多头自注意力部分 ---
# LayerNorm
xx_norm1 = self.ln1(x.permute(0, 2, 3, 1)).permute(0, 3,, 1, 2) # (B, C, H, W) -> (B, H, W, C) -> LN -> (B,, H, W)
# 准备输入给MultiheadAttention
b, c, h, w = x_norm1.shape
x_flat = x_norm1.flatten(2).transpose(1, 2) # (B, C, H, W) -> (B, C, H*W) -> (B, H*W, C)
# 应用自注意力
# Q, K, V 都是 x_flat
attn_output, _ = self.attn(x_flat, x_flat, x_flat) # (B, H*W, C)
# Reshape回原始图像格式并加上残差
attn_output = attn_output.transpose(1, 2).reshape(b, c, h, w) # (B, H*W, C) -> (B, C, H*W) -> (B, C, H, W)
x = identity + attn_output
# --- 3. 处理前馈网络部分 ---
identity = x # 保存新的identity
# LayerNorm
x_norm2 = self.ln2(x.permute(0, 2, 3, 1)).permute(0, 3, 1, 2) # (B, C, H, W) -> (B, H, W, C) -> LN -> (B, C, H, W)
# 应用前馈网络
ffn_output = self.ffn(x_norm2.flatten(2).transpose(1, 2)) # (B, C, H, W) -> (B, H*W, C)
ffn_output = ffn_output.transpose(1, 2).reshape(b, c, h, w) # (B, H*W, C) -> (B, C, H*W) -> (B, C, H, W)
# 加上残差
x = identity + ffn_output
return x
代码解析:
-
__init__(self, c, num_heads): 构造函数接收通道数c和注意力头数num_heads。我们在这里实例化了LayerNorm、MultiheadAttention和ffn。ffn中的维度扩展比例(这里是4倍)是Transformer的常见设计。 -
forward(self, x): 这是核心逻辑。- 形状变换:
nn.MultiheadAttention和nn.LayerNorm默认处理的张量形状是(序列度, Batch, 特征维度)或(Batch, 序列长度, 特征维度)。而我们的输入是(B, C, H,W)。因此,需要频繁使用permute,flatten,reshape来适配。 - 注意力计算:
self.attn(x_flat, x_flat, x_flat)执行自注意力,因为Query, Key, Value都来自同一个输入x_flat - 残差连接:
x = identity + ...实现了残差连接,这是稳定深层网络训练的关键。注意,我们分别在自注意力和前馈网络后都进行了残差连接。 - LayerNorm位置:我们采用了Pre-LN的结构,即在输入到子模块(attn或ffn)之前进行Layer Normalization,这通常比Post-LN训练更稳定。
- 形状变换:
3.2 步骤二:构建混合模块 C2f_Transformer
现在,我们基于C2f的结构和我们新定义的TransformerLayer来构建C2f_Transformer。同样,将代码添加到ultralytics/nn/modules/下的某个文件中(例如,可以新建一个conv.py的副本,或者直接在conv.py中添加)。
# ultralytics/nn/modules/conv.py (或其他模块文件)
# 需要从其他地方导入我们刚刚定义的 TransformerLayer 和 YOLOv8 原有的 Bottleneck, Conv 等
# 假设已经导入了 Conv, Bottleneck, TransformerLayer 等
# from .block import Bottleneck
# from .conv import Conv
# from .transformer import TransformerLayer
class C2f_Transformer(nn.Module):
"""
一个集成了Transformer层的C2f模块的变体。
在Bottleneck序列的末尾添加了一个TransformerLayer。
"""
def __init__(self, c1, c2, n=1, shortcut=False, g=1, e=0.5):
"""
初始化C2f_Transformer模块。
参数:
c1 (int): 输入通道数。
c2 (int): 输出通道数。
n (int): Bottleneck块的数量。
shortcut (bool): 是否在Bottleneck中使用shortcut连接。
g (int): 分组卷积的组数。
e (float): 通道扩展因子。
"""
super().__init__()
self.c = int(c2 * e) # hidden channels
# 初始卷积层,将输入通道从c1转换到2*self.c
self.cv1 = Conv(c1, 2 * self.c, 1, 1)
# 最终输出卷积层
self.cv2 = Conv((2 + n) * self.c, c2, 1)
# 创建n个处理块,前 n-1 个是Bottleneck,最后一个是TransformerLayer
# 注意:这里我们强制要求n>=1,且最后一个是Transformer
if n > 0:
self.m = nn.ModuleList()
# 添加 n-1 个 Bottleneck 模块
for _ in range(n - 1):
self.m.append(Bottleneck(self.c, self.c, shortcut, g, e=1.0))
# 添加 1 个 TransformerLayer 模块
# 注意:TransformerLayer的通道数是self.c,头数可以自己设定,比如4或8
self.m.append(TransformerLayer(self.c, num_heads=4))
else:
self.m = nn.Identity()
def forward(self, x):
"""
前向传播函数。
"""
# 1. 初始卷积
y = list(self.cv1(x).split((self.c, self.c), 1))
# 2. 依次通过 n 个处理块 (Bottlenecks + Transformer)
# 将中间结果都拼接到y中
y.extend(m(y[-1]) foror m in self.m)
# 3. 拼接所有中间特征并进行最终卷积
return self.cv2(torch.cat( 1))
def forward_split(self, x):
"""
一个用于可视化的前向传播变体,逻辑同forward。
"""
y = list(self.cv1(x).split((self.c, self.c), 1))
y.extend(m(y[-1]) for m in self.m)
return self.cv2(torch.cat(y, 1))
代码解析:
__init__: 整体结构与原始的C2f非常相似。最大的改动在self.m的构建上。我们创建了一个nn.ModuleList,其中包含n-1个常规的Bottleneck块,并在最后追加了一个TransformerLayer实例。我们硬编码了num_heads=4,这可以作为一个超参数进行调整。forward:前向传播的逻辑与C2f完全一致!这就是模块化设计的美妙之处。我们无需修改前向传播的代码,因为Bottleneck和TransformerLayer都遵循input -> process -> output的模式,可以被self.m同等对待。这确保了我们的修改是“即插即用”的。
3.3 步骤三:修改YOLOv8模型文件(.yaml)
模型结构不是硬编码在Python代码里的,而是通过.yaml配置文件动态构建的。这是YOLOv8框架非常灵活的一点。我们需要创建一个新的.yaml文件来使用我们的C2f_Transformer。
假设我们想改造yolov8n.yaml,将其最后一个C2f`模块换成我们的新模块。
原始yolov8n.yaml的Backbone部分可能样:
# ultralytics/models/v8/yolov8n.yaml
...
backbone:
# [from, number, module, args]
- [-1, 1, Conv, [64, 3, 2]] # 0-P1/2
- [-1, 1, Conv, [128, 3, 2]] # 1-P2/4
- [-1, 3, C2f, [128, True]] # 2
- [-1, 1, Conv, [256, 3, 2]] # 3-P3/8
- [-1, 6, C2f, [256, True]] # 4
- [-1, 1, Conv, [512, 3, 2]] # 5-P4/16
- [-1, 6, C2f, [512, True]] # 6
- [-1, 1, Conv, [1024, 3, 2]] # 7-P5/32
- [-1, 3, C2f, [1024, True]] # 8
- [-1, 1, SPPF, [1024, 5]] # 9
...
创建yv8n-transformer.yaml:
我们将第8层的C2f替换为C2f_Transformer。
# yolov8n-transformer.yaml (新建文件)
# Parameters
nc: 80 # number of classes
depth_multiple: 0.33 # model depth multiple
width_multiple: 0.25 # layer channel multiple
# ... 其他参数保持不变 ...
# YOLOv8.0n backbone
backbone:
# [from, number, module, args]
- [-1, 1, Conv, [64, 3, 2]] # 0-P1/2
- [-1, 1, Conv, [128, 3, 2]] # 1-P2/4
- [-1, 3, C2f, [128, True]] # 2
- [-1, 1, Conv, [256, 3, 2]] # 3-P3/8
- [-1, 6, C2f, [256, True]] # 4
- [-1, 1, Conv, [512, 3, 2]] # 5-P4/16
- [-1, 6, C2f, [512, True]] # 6
- [-1, 1, Conv, [1024, 3, 2]] # 7-P5/32
# --- !!!这里是我们的修改!!! ---
- [-1, 3, C2f_Transformer, [1024, True]] # 8
- [-1, 1, SPPF, [1024, 5]] # 9
# YOLOv8.0n head
# ... head部分保持不变 ...
head:
...
解析:
我们仅仅将第8层(索引从0开始)的模块名名从C2f改为了C2f_Transformer。args部分[1024, True]分别对应c2(输出通道数,这里的1024会被width_multiple缩放)和shortcut`参数。YOLOv8的解析器会自动匹配模块名并用相应的参数实例化它。
3.4 步骤四:注册新模块并启动训练
最后一步,要让YOLOv8的解析器认识我们新定义的C2f_Transformer。最简单的办法是修改ultralytics/nntasks.py文件。
打开 ultralytics/nn/tasks.py,找到parse_model函数。在这个函数的作用域内,它会导入所有需要的模块。我们需要确保我们的C2f_Transformer也被导入。
# ultralytics/nn/tasks.py
# ... (文件开头的 imports) ...
from ultralytics.nn.modules import (AIFI, C1, C2, C3, C2f, C3x, ... , SPPF)
# 在这个import列表中,加入我们的新模块
# 假设你把 C2f_Transformer 和 TransformerLayer 放在了 ultralytics.nn.modules.conv 中
from ultralytics.nn.modules.conv import C2f_Transformer, Conv, Bottleneck # 确保导入了
# 或者更明确地
from ultralytics.nn.modules import C2f_Transformer # 如果你把它注册到了 __init__.py
# ... (在 parse_model 函数内部) ...
# 通常不需要修改函数内部,只要确保模块被正确导入,
# Python的globals()机制就能找到它。
def parse_model(d, ch, verbose=True): # model_dict, input_channels(3)
# ...
# 在这行代码之前,确保 C2f_Transformer 在当前作用域是可访问的
m_ = nn.Sequential(*(m(*args) for _ in range(n))) if n > 1 else m(*args)
# ...
最稳妥的方式是:
-
将
TransformerLayer和C2f_Transformer的定义代码,放入ultralytics/nn/modules/block.py或conv.py中。 -
打开 `ultralyticsnn/modules/init.py`,在模块导出列表中加入你的新类名。
# ultralytics/nn/modules/__init__.py __all__ = [..., 'C2f', 'C2f_Transformer', 'TransformerLayer'] # 添加你的模块
通过这种方式,tasks.py中from ultralytics.nn.modules import * 这样的语句就能自动加载你的模块,无需再改动tasks.py。
启动训练:
现在,一切准备就绪!你可以像平常一样使用CLI或Python脚本来启动训练,只需指定你的新.yaml文件即可。
# 使用命令行
yolo train model=path/to/yolov8n-transformer.yaml data=coco128.yaml epochs=100 imgsz=640
或者使用Python脚本:
from ultralytics import YOLO
# 加载你的自定义模型配置文件
# 可以从头开始训练,也可以加载预训练权重进行微调
# 加载预训练的yolov8n.pt,框架会自动加载匹配层(除C2f_Transformer外)的权重
model = YOLO('yolov8n-transformer.yaml').load('yolov8n.pt')
# 开始训练
results = model.train(data='coco128.yaml',
epochs=100,
imgsz=640,
device=0)
恭喜你!🎉 你已经成功地为YOLOv8装上了强大的“Transformer之眼”!
⏩ 第四章:实验析与展望
集成了新模块只是第一步,更重要的是通过实验来验证其效果,并深入分析其行为。
4.1 实验设计思路
为了科学地评估我们的C2f_Transformer模块,我们需要进行一组对照实验:
-
基线模型 (Baseline):使用原版的
yolov8n.yaml训练的模型。 -
实验模型 (Experimental):使用我们的
yolov8n-transformer.yaml训练的模型。
实验设置应保持一致:
-
数据集:对于快速验证,使用
COCO128;对于严谨的评估,应使用完整的COCO、VOC或其他你的目标数据集。 -
训练超参数:
epochs,batch_size,learning_rate,optimizer等所有超参数必须完全相同。 -
硬件:在同一台(或同型号)GPU上进行训练和测试,以保证公平性。
评估指标:
- 精度指标:
mAP@0.5,mAP@0.5:0.95。 - 计算成本:模型参数量(Parameters)、浮点运算数(GFLOPs)。
- 速度指标:推理速度(ms/imagee)。
4.2 性能对比与权衡分析(附假设结果)
由于实际训练需要大量时间和计算资源,这里我们出一份假设的实验结果表格,并进行分析。
| 模型 | 参数量 (M) | GFLOPs | mAP@0.5 | mAP@0.5:0.95 | 推理速度 (ms) |
|---|---|---|---|---|---|
| YOLOv8n (Baseline) | 3.2 | 8.7 | 49.5 | 32.8 | 1.5 |
| YOLOv8n-Transformer | 3.8 (+18.8%) | 9.5 (+9.2%) | 50.1 (+0.6) | 33.4 (+0.6) | 2.0 (-33%) |
分析:
-
精度分析:
- 我们的混合模型在
mAP上取得了微小的提升(+0.6%)。这符合预期,因为Transformer的全局建模能力可能帮助模型更好地理解了物体之间的上下文关系,或者对一些具有非局部特征的大型物体识别得更准确。 - 这种提升可能在特定场景或特定类别别上更为明显,需要进行更细致的错误分析。
- 我们的混合模型在
-
计算成本分析:
- 参数量和GFLOPs增加:
TransformerLayer比一个简单的Bottleneck块包含更多的参数(尤其是在ffn中)和更复杂的计算(矩阵乘法),因此模型整体的参数量和计算量有所上升。 - 推理速度下降:速度下降幅度(33%)比GFLOPs的增幅(9.2%)要大。这可能是因为:1) Transformer中的操作(如
softmax,大量的reshape和transpose)对GPU的并行计算不如卷积友好;2)MultiheadAttention的实现可能没有像卷积那样被深度优化。
- 参数量和GFLOPs增加:
权衡 (Trade-off):
实验结果清晰地展示了精度与效率的权衡。我们用更多的计算资源换取了潜在的精度提升。在对性能要求极致的边缘设备上,这种交换可能不划算。但在云端或对精度要求更高的场景下,这可能是值得的。这也激励我们去探索更轻量化的Transformer变体(如Swin Transformer, MobileViT等)。
4.3 特征可视化:洞察模型的“注意力”
为了更直观地理解Transformer层在做什么,我们可以使用注意力视化技术。对于MultiheadAttention,我们可以提取出注意力权重矩阵 softmax(QK^T/√d_k),并将其reshape回图像的空间维度。
预期观察:
- CNN层 (如C2f) 的注意力 (通过Grad-CAM等方法):注意力会高度集中在物体的局部,如轮廓、纹理等。
- TransformerLayer的注意力:对于某个目标物体的某个Patch,它的注意力图可能会高亮显示图像中其他与之相关的、但距离很远的Patch。例如,对于于“网球拍”的Patch,其注意力图可能会同时高亮“网球”所在的区域,即使它们在图像中相隔很远。这观地证明了Transformer正在进行全局关系建模。
4.4 混合架构的优缺点总结
-
优点:
- 全局上下文建模:有效弥补了CNN感受野有限的短板,能捕捉长距离依赖。
- 性能提升潜力:在需要复杂场景理解和关系推理的任务上,有望提升模型精度。
- 灵活性:可以以作为即插即用的模块,方便地集成到现有的CNN架构中。
-
缺点:
- 计算成本高:参数量、计算量和内存占用都高于纯卷积模块。
- 推理速度慢:对硬件优化不如卷积充分能成为推理瓶颈。
- 数据敏感性:相比CNN,可能需要更多的数据或更强的正则化来防止过拟合。
⏩ 第五章:总结与思考
5.1 本章核心知识点回顾
在本章的漫长旅程中,我们并肩作战,取得了丰硕的成果!让我们回顾一下核心知识点:
- 理论层面:我们深入入理解了CNN的“局部性”优势与“近视”局限,以及Transformer的“全局性”优势与“计算开销”挑战明确了二者融合的理论基础和巨大潜力。
- 设计层面:我们探讨了在YOLOv8中植入Transformer的多种策略,并最终选择在Backbone深层设计了一个
C2f_Transformer混合模块,并用Mermaid图清晰地展示了其结构。 - 实践层面:我们从零开始,用PyTorch代码实现了
TransformerLayer和`C2f_ansformer,并详细讲解了如何修改.yaml`配置文件、注册模块,最终成功地将新模型投入训练。 - 分析层面:我们讨论了如何设计实验来评估混合架构的性能,并分析了其在精度和效率之间的权衡,展望了通过特征可视化来深入理解其工作机理的方法。
5.2 未来之路:更高效、更智能的融合
我们今天的实践只是冰山一角。CNNTransformer的融合仍然是一个非常活跃的研究领域。未来的方向可能包括:
- 高效Transformer变体:将我们今天的
TransformerLayer替换为Swin Transformer Block、MobileViT Block等计算效率更高的注意力模块,以寻求更好的精度-速度平衡点。 - 动态融合机制:设计一种机制,让网络可以自适应地决定在哪些位置、以多大的强度来使用Transformer的全局能力,而不是像我们今天这样静态地指定。
- NAS与混合架构:结合我们上一节学习的神经网络架构搜索(NAS),让算法自动去探索CNN和Transformer块的最佳组合方式,设计出超越人类专家设计的全新混合架构。
希望通过本章的学习,您不仅掌握了一项具体的YOLOv8改进技巧,更能从中体会到模型架构设计的魅力与哲思。不断探索、勇于实践,是每一位AI工程师成长的必经之路!加油!🥳
⏩ 下期预告:迈向时空维度——3D卷积时空特征建模
到目前为止,我们所有的讨论都局限于处理静态的2D图像。然而,真实世界是动态的,视频数据无处不在。自动驾驶、行为分析、视频监控等应用都要求模型能够理解时间和空间上的连续变化。
在下一节 《YOLOv8【卷积创新篇·第24节】3卷积时空特征建模》 中,我们将把YOLOv8从2D世界带入3D时空!
- 我们将一起习3D卷积的基本原理,了解它如何同时在空间和时间维度上提取特征。
- 我们将探讨如何设计一个基于3D卷积的网络模块,并将其集成到YOLOv8中,使其具备处理视频流、进行视频目标检测的能力。
- 我们还会讨论(2+1)D卷积等高效变体,以及在视频任务中面临的机遇与挑战。
从静态图像到动态视频,这是一次维度的跨越!让我们共同期待,下一节将如何赋予YOLOv8感知时间流动的能力!敬请关注!
希望本文所提供的YOLOv8内容能够帮助到你,特别是在模型精度提升和推理速度优化方面。
PS:如果你在按照本文提供的方法进行YOLOv8优化后,依然遇到问题,请不要急躁或抱怨!YOLOv8作为一个高度复杂的目标检测框架,其优化过程涉及硬件、数据集、训练参数等多方面因素。如果你在应用过程中遇到新的Bug或未解决的问题,欢迎将其粘贴到评论区,我们可以一起分析、探讨解决方案。如果你有新的优化思路,也欢迎分享给大家,互相学习,共同进步!
🧧🧧 文末福利,等你来拿!🧧🧧
文中讨论的技术问题大部分来源于我在YOLOv8项目开发中的亲身经历,也有部分来自网络及读者提供的案例。如果文中内容涉及版权问题,请及时告知,我会立即修改或删除。同时,部分解答思路和步骤来自全网社区及人工智能问答平台,若未能帮助到你,还请谅解!YOLOv8模型的优化过程复杂多变,遇到不同的环境、数据集或任务时,解决方案也各不相同。如果你有更优的解决方案,欢迎在评论区分享,撰写教程与方案,帮助更多开发者提升YOLOv8应用的精度与效率!
OK,以上就是我这期关于YOLOv8优化的解决方案,如果你还想深入了解更多YOLOv8相关的优化策略与技巧,欢迎查看我专门收集YOLOv8及其他目标检测技术的专栏《YOLOv8实战:从入门到深度优化》。希望我的分享能帮你解决在YOLOv8应用中的难题,提升你的技术水平。下期再见!
码字不易,如果这篇文章对你有所帮助,帮忙给我来个一键三连(关注、点赞、收藏),你的支持是我持续创作的最大动力。
同时也推荐大家关注我的公众号:「猿圈奇妙屋」,第一时间获取更多YOLOv8优化内容及技术资源,包括目标检测相关的最新优化方案、BAT大厂面试题、技术书籍、工具等,期待与你一起学习,共同进步!
🫵 Who am I?
我是bug菌,CSDN | 掘金 | InfoQ | 51CTO | 华为云 | 阿里云 | 腾讯云 等社区博客专家,C站博客之星Top30,华为云多年度十佳博主,掘金多年度人气作者Top40,掘金等各大社区平台签约作者,51CTO年度博主Top12,掘金/InfoQ/51CTO等社区优质创作者;全网粉丝合计 30w+;更多精彩福利点击这里;硬核微信公众号「猿圈奇妙屋」,欢迎你的加入!免费白嫖最新BAT互联网公司面试真题、4000G PDF电子书籍、简历模板等海量资料,你想要的我都有,关键是你不来拿。

-End-
更多推荐



 13
13 0
0- 0



 已为社区贡献14条内容
已为社区贡献14条内容

所有评论(0)