
AI训练要的数据这么多,怎么存?
在大模型时代,AI 的训练与推理已经不再是单纯的算力问题。随着模型参数规模进入百亿级、数据量级扩展到 TB~PB,数据管线与存储架构往往成为影响训练速度的决定性因素。算力再强,如果数据加载跟不上,也会出现 GPU 空闲等待 I/O 的情况,训练效率大打折扣。
📚AI Infra系列文章
在大模型时代,AI 的训练与推理已经不再是单纯的算力问题。随着模型参数规模进入百亿级、数据量级扩展到 TB~PB,数据管线与存储架构往往成为影响训练速度的决定性因素。算力再强,如果数据加载跟不上,也会出现 GPU 空闲等待 I/O 的情况,训练效率大打折扣。
所有相关源码示例、流程图、模型配置与知识库构建技巧,我也将持续更新在Github:LLMHub,欢迎关注收藏!
希望大家带着下面的问题来学习,我会在文末给出答案。
- 大规模训练数据该如何分层存储与组织格式,才能兼顾成本与吞吐?
- 预处理、增广与特征生成放在离线还是在线更合适?
- 如何通过缓存与数据加载优化,避免GPU因I/O而闲置?
1. 分层存储与数据组织
在实际落地中,数据通常采用“热、温、冷”三层架构。

Hot 层存放的是训练时活跃的数据和索引,对 IOPS 和吞吐有极高要求,常见部署方式是本地 NVMe 或高性能分布式文件系统;Warm 层承担团队共享和版本管理,一般使用对象存储(如 Ceph、MinIO)或分布式文件系统;Cold 层则存放历史快照、原始数据和中间产物,用于后续再加工或追溯。这样的分层方式既能保证训练高效运行,又能合理控制存储成本。
在文件格式上,顺序可流式读取的容器化分片是主流选择,如 WebDataset(tar 分片)、TFRecord、Parquet 或 LMDB。合理的分片大小(通常在 100MB~2GB 之间)既能降低元数据开销,又能兼顾网络带宽与节点内存。为了支持可重复、可恢复训练,还需要建立样本级索引和全局 shuffle map。数据清洗与去重同样重要,文本可以使用 MinHash/SimHash,图像可用感知哈希,避免无效数据放大。
数据的版本管理也不可忽视。通过打标签和语义化版本号(如 imagenet-1.0.3),配合 DVC 或 LakeFS 等工具,可以让“数据—代码—模型”保持一致性和可追溯性。
2. 预处理与增广:离线 vs 在线
预处理和数据增强是训练效率的另一大关键。一个普遍的原则是:能离线就离线。
离线阶段适合完成解码、标准化、分词、图像 resize 或裁剪等固定流程,这样能显著降低训练时的 CPU 压力,并保证数据吞吐稳定。其优势是吞吐高、复用性强,缺点是灵活性略差、存储空间消耗稍多。
而在线处理则更适合需要随机性或多样化的增强手段,比如随机裁剪、颜色抖动、MixUp/CutMix、SpecAugment 等。这类操作对模型泛化能力帮助明显,且往往轻量、可矢量化,因此保留在 DataLoader 阶段即可。
对于 NLP,可以提前完成分词、分块,生成按上下文长度拼接的 packed samples;对于图像或视频,可以提前建立帧索引和 clip manifest,实现训练时的零拷贝读取。
3. 缓存策略
为了避免 GPU 因 I/O 停摆,缓存设计至关重要。
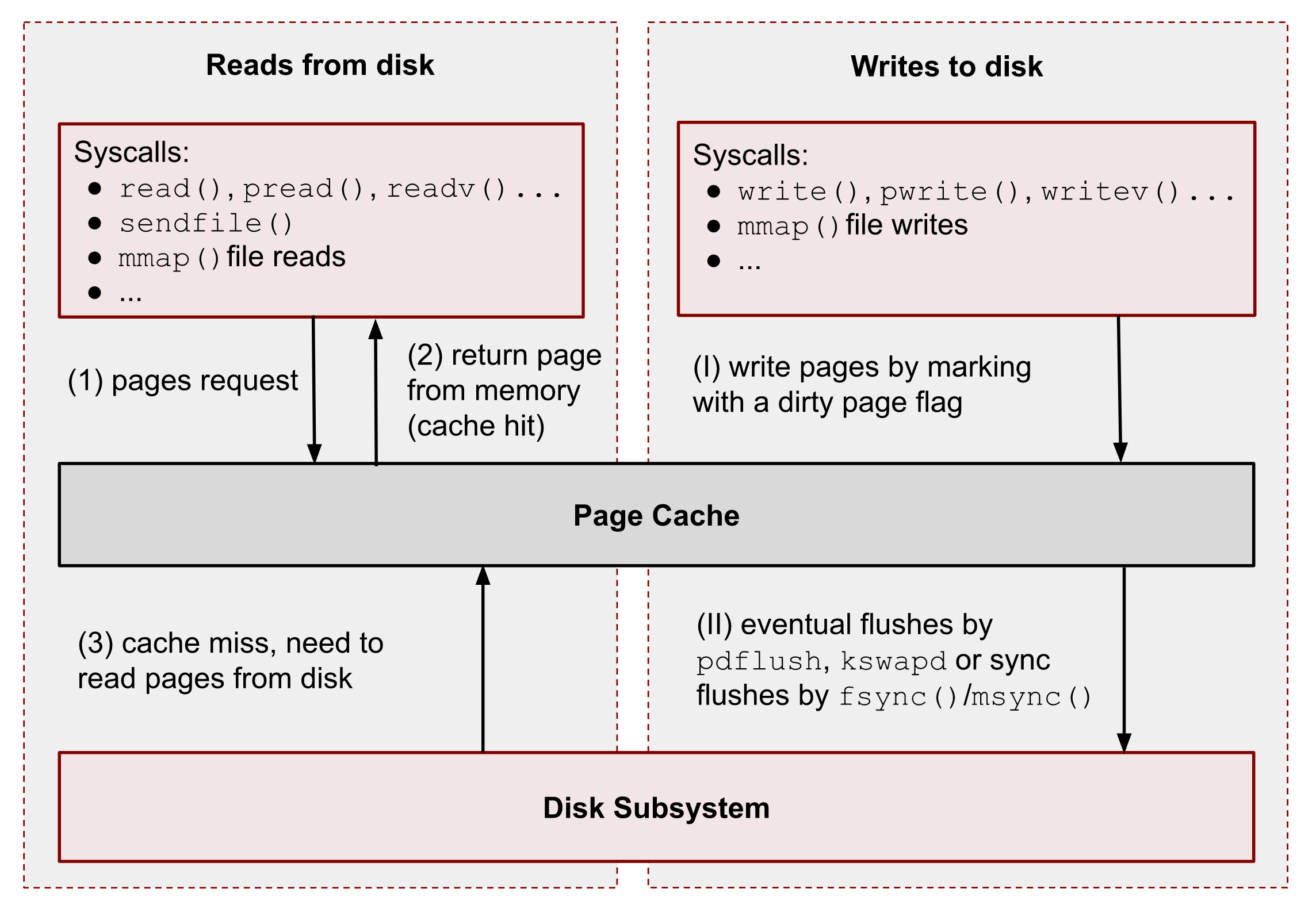
在本地机器层面,可以充分利用 Page Cache 和 mmap,大块顺序读能极大提升缓存命中率;
同时,将对象存储中的分片预拉取到本地 NVMe,作为短期缓存使用,也能明显提升首轮训练效率。常见做法是训练前做 warm-up,提前拉取头几个 epoch 所需数据,避免初期吞吐波动。
在集群层面,可以部署 Redis、RocksDB 或 Alluxio 作为热点数据和索引的共享缓存层。缓存一致性可通过数据版本号来管理,训练任务完成后再异步清理或逐版本淘汰,保证资源利用率。
一个小技巧是尽量**使用顺序读和大批量 prefetch,而不是频繁的小块随机 I/O,**这对分布式训练尤其重要。
4. 加速数据加载与管线并行
除了存储与缓存,数据加载和训练管线的并行优化同样重要。
在 PyTorch 中,可以通过调整 DataLoader 参数来提升效率:合理设置 num_workers(通常为 CPU 核数的一半到等于核数)、开启 pin_memory 与 prefetch_factor,并启用持久化 worker 避免频繁 fork。此外,结合 non_blocking=True 和混合精度训练,还能让计算与 HtoD 拷贝并行,减少等待。
loader = torch.utils.data.DataLoader(
dataset,
batch_size=global_bs_per_rank,
num_workers=os.cpu_count() // 2,
pin_memory=True,
prefetch_factor=4,
persistent_workers=True,
shuffle=False,
)
在 TensorFlow 中,tf.data 的自动调优功能可以简化并行与预取配置。
ds = (tf.data.TFRecordDataset(files, num_parallel_reads=tf.data.AUTOTUNE)
.map(parse_fn, num_parallel_calls=tf.data.AUTOTUNE)
.shuffle(buffer_size=1<<16, reshuffle_each_iteration=True)
.batch(batch_size, drop_remainder=True)
.prefetch(tf.data.AUTOTUNE))
对于远程对象存储,推荐配合 fsspec/s3fs/gcsfs 等工具,结合分片大对象和范围读取,避免频繁小文件访问。WebDataset 或 Hugging Face Datasets 的流式模式,也能很好地缓解本地存储压力。
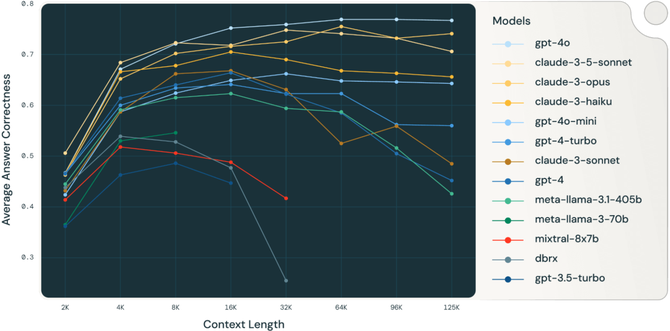
另外,大模型训练常常采用 packed samples 技术,将多个短序列拼接为接近目标上下文长度的长序列,提高 GPU/TPU 的利用率。跨 epoch 时,通过多份 shuffle map 保证随机性与可复现性。
5. 网络与调度
最后,网络与调度层面对训练吞吐的影响不容忽视。拓扑感知调度可以让训练节点尽量靠近数据存储网关,减少跨机架或跨可用区的延迟和费用。高速互联(如 RDMA、InfiniBand、RoCE)则能保证梯度通信和数据 I/O 不相互抢占带宽。
在做带宽预算时,可以先估算公式:每 GPU 样本大小 × QPS × 节点数,并预留 20%~30% 的余量。如果发现瓶颈,可以在数据入口增加节流与回压机制,防止集群过载。
最后,我们回答一下文章开头提出的问题。
1.如何分层存储与组织格式?
采用 Hot/Warm/Cold 分层;训练用的热分片放NVMe/并行FS;对象存储承载版本库与冷数据;使用 WebDataset/TFRecord/Parquet/LMDB 等顺序友好、可索引的容器化分片。
2.离线还是在线预处理更合适?
“能离线就离线”,把重解码与稳定变换固化成分片;仅保留必要且轻量的在线增广以保证随机性与泛化。
3.如何避免GPU因I/O而闲置?
多级缓存(NVMe/共享缓存)+ 大分片顺序读 + DataLoader 并行与预取(num_workers/prefetch/pin_memory)+ 拓扑感知调度与带宽预算;必要时启用 packed samples 与 streaming。
关于深度学习和大模型相关的知识和前沿技术更新,请关注公众号coting!
以上内容部分参考了主流框架文档与工程实践,非常感谢,如有侵权请联系删除!
更多推荐


 11
11 0
0- 0



 已为社区贡献23条内容
已为社区贡献23条内容

所有评论(0)