
智能体在交通行业的关键技术与解决场景
的循环以极高的频率(通常为10-100Hz)持续运行,确保智能体能够应对瞬息万变的交通环境,实现安全、高效、舒适的自主驾驶。车联网(V2X)技术,包括车-车(V2V)、车-路(V2I)、车-云(V2N)、车-人(V2P)通信。,智能体技术通过将交通系统中的每个元素激活为具有智能的个体,再通过高效的通信和协同决策,将传统的“自上而下”的集中控制模式,转变为“自下而上”的。例如,它知道左边5米处有一辆
目录
场景一:城市信号灯协同优化(多智能体强化学习 - MARL)
场景三:智能匝道汇流与队列行驶(协同自适应巡航控制 - CACC)
智能体(Agent)在交通系统中的有效运作,依赖于一个技术栈的协同支持。这些技术使智能体能够“感知”、“思考”、“通信”并“执行”。
一、关键技术 (Key Technologies)
-
感知与融合技术 (Perception & Fusion)
-
技术内容: 包括计算机视觉(CV)、激光雷达(LiDAR)、毫米波雷达、全球定位系统(GPS)、物联网(IoT)传感器等。多传感器融合技术是核心,它能将来自不同源的数据(如摄像头图像和雷达点云)进行校准、关联和组合,形成对环境更准确、更可靠的全面感知。
-
为什么关键: 这是智能体的“眼睛和耳朵”。没有精确、实时的环境感知,后续的决策和协同就无从谈起。例如,自动驾驶车辆Agent必须能准确识别车道线、交通标志、车辆、行人及他们的速度和意图。
-
-
协同通信技术 (V2X Communication)
-
技术内容: 车联网(V2X)技术,包括车-车(V2V)、车-路(V2I)、车-云(V2N)、车-人(V2P)通信。主要标准包括DSRC和C-V2X(基于4G/5G)。
-
为什么关键: 这是智能体之间的“语言”。它打破了单个智能体的感知壁垒,实现了信息在全域范围内的共享与协同。例如,路侧单元(RSU)Agent可以将路口盲区的信息通过V2I通信实时发送给车辆Agent,实现超视距感知。
-
-
决策与规划技术 (Decision & Planning)
-
技术内容:
-
强化学习(RL): 智能体通过与环境交互获得的奖励来学习最优策略,非常适用于信号控制、自动驾驶决策等场景。
-
深度强化学习(DRL): 结合深度学习的感知能力和强化学习的决策能力,处理高维状态空间。
-
联合规划(Multi-Agent Planning): 为多个智能体计算出一系列能协同实现共同目标的行为序列。
-
博弈论: 用于建模智能体之间既竞争又合作的关系,例如在无信号灯路口,车辆Agent通过博弈协商通行次序。
-
-
为什么关键: 这是智能体的“大脑”。它将感知到的信息转化为具体的行动指令,是实现自主性和智能性的核心。
-
-
仿真与数字孪生技术 (Simulation & Digital Twin)
-
技术内容: 构建一个与物理交通系统完全镜像的虚拟数字孪生世界。它集成了地理信息、路网结构、交通规则、实时流量数据等。
-
为什么关键: 这是智能体的“训练场”和“试验田”。在数字孪生环境中,可以安全、低成本、高效地训练和测试智能体算法(尤其是强化学习),评估新策略的效果,然后再部署到现实世界,避免了试错成本和高风险。
-
-
边缘计算与云计算协同 (Edge-Cloud Collaboration)
-
技术内容: 云计算负责海量数据的存储、非实时的大规模全局优化(如区域调度);边缘计算则部署在靠近数据源的地方(如路口),负责处理高实时性、低延迟的任务(如信号灯实时控制、碰撞预警)。
-
为什么关键: 这是智能体的“神经中枢系统”。它合理分配了算力,确保了系统既能进行宏观战略优化,又能完成微观战术层面的瞬时反应。
-
二、解决的典型场景 (Solved Scenarios)
上述技术的结合,在以下具体场景中发挥着革命性的作用:
场景一:城市信号灯协同优化(解决效率痛点)
-
问题: 传统信号灯配时固定或方案单一,无法适应潮汐车流,造成拥堵。
-
智能体方案: 每个路口信号灯是一个智能体。它们通过路侧传感器(感知技术)获取实时各方向排队长度。相邻路口Agent通过协同通信技术(V2I)交换流量信息。
-
决策技术: 采用多智能体强化学习(MARL),以区域整体通行效率最高(平均等待时间最短)为目标,协同调整各自的绿灯时长和相位差,形成“绿波带”。
-
价值: 提升20%-30%的路口通行效率,显著减少拥堵和等待时间。
场景二:无保护左转与交叉路口通行(解决安全与效率痛点)
-
问题: 无信号灯路口或复杂路口,人驾车辆通过效率低且冲突风险高。
-
智能体方案: 每辆网联自动驾驶汽车是一个智能体。
-
决策与通信技术: 车辆Agent在接近路口时,通过V2V通信广播自身的位置、速度和意图。它们不需要等待中央控制器命令,而是基于博弈论模型进行分布式实时协商(例如,“我先通过,你减速”),在毫秒级内达成一致的无冲突通行方案。
-
价值: 消除冲突点,无需等待红灯,安全且高效地通过路口,极大提升通行能力。
场景三:智能匝道汇流与队列行驶(解决效率与安全痛点)
-
问题: 高速匝道汇入主路是事故高发点,且汇入车辆减速会引发后方连锁反应,造成拥堵。
-
智能体方案: 主路车辆和匝道车辆都是智能体。
-
通信与决策技术: 匝道车辆Agent通过V2V通信与主路目标车道的车辆Agent组进行协商。主路后方车辆Agent主动调整速度(稍微减速或加速),为匝道车辆“让”出一个安全空档。匝道车辆Agent平滑地汇入,实现“无缝衔接”。进一步地,多辆车可以组成紧密的队列行驶,降低风阻,节省能耗。
-
价值: 提升汇入安全性和道路容量,减少因汇流引发的拥堵和事故,并降低油耗。
场景四:实时动态调度(解决效率与体验痛点)
-
问题: 公交发车间隔固定,无法响应实时客流变化;物流车辆路径静态,无法应对突发订单或拥堵。
-
智能体方案: 每辆公交车、物流车是一个移动智能体,调度中心是一个管理智能体。
-
感知与决策技术: 管理Agent通过车载GPS和站点监控(感知技术)实时掌握所有车辆位置和客流量。当检测到某线路客流激增时,管理Agent利用优化算法动态调整发车间隔,甚至派遣备用车辆(应急Agent)。对于物流,管理Agent为每个订单分派给最合适的车辆Agent,并为其实时重规划最优路径以避开拥堵。
-
价值: 提升公共交通运输效率和用户体验,降低物流成本,提高车辆利用率。
场景五:全域碰撞预警(解决安全痛点)
-
问题: 驾驶员视野存在盲区,无法感知到视野外的潜在危险。
-
智能体方案: 车辆、路侧单元(RSU)、行人手机都可作为智能体。
-
通信技术: 当一辆车Agent紧急制动时,该事件会通过V2V通信瞬间广播给后方所有车辆Agent,形成电子刹车灯效应,远超视觉范围。路侧RSU Agent检测到有行人闯入马路,通过V2I通信向正在驶来的车辆Agent发出预警。
-
价值: 提供前所未有的态势感知能力,将交通事故从“事后补救”变为“事前预防”,极大提升道路交通安全水平。
总结而言,智能体技术通过将交通系统中的每个元素激活为具有智能的个体,再通过高效的通信和协同决策,将传统的“自上而下”的集中控制模式,转变为“自下而上”的分布式协同治理模式。这正是在复杂动态的交通环境中,解决效率、安全、体验和可持续等多重痛点的最有效路径。
针对每一个场景 各自都写一个实现路径 核心代码
好的,针对上述五个典型场景,我将分别给出其实现路径和核心代码示意。
请注意,以下代码为高度简化的伪代码/概念代码,用于说明核心逻辑,并非可直接运行的生产代码。
场景一:城市信号灯协同优化(多智能体强化学习 - MARL)
实现路径:
-
智能体定义: 每个路口信号灯作为一个智能体(TrafficLightAgent)。
-
状态(State): 每个Agent的状态是其所控路口各方向的车道队列长度(
[queue_length_north, queue_length_south, ...])以及相邻路口的状态信息(通过通信获取)。 -
动作(Action): Agent选择下一个相位周期的绿灯延长或缩短时间(例如,
[extend_phase_A_by_5s, switch_to_phase_B, ...])。 -
奖励(Reward): 单个Agent的奖励是其路口总等待时间的负值(
-total_wait_time)。全局奖励是所有路口总等待时间的负值。 -
训练: 在数字孪生仿真环境中,使用多智能体PPO或QMIX等算法进行集中训练。训练完成后,每个Agent可以分布式执行。
核心代码示意 (Python Pseudocode):
python
复制
下载
# 伪代码:基于邻居观察的多智能体信号灯决策
class TrafficLightAgent:
def __init__(self, agent_id, intersection):
self.agent_id = agent_id
self.intersection = intersection
self.model = load_pretrained_marl_model() # 预训练的MARL模型
def get_observation(self):
# 获取自身路口各车道队列长度
local_obs = get_queue_lengths(self.intersection)
# 从通信网络获取相邻路口的状态信息
neighbor_obs = []
for neighbor_id in self.get_neighbor_ids():
neighbor_obs.extend(communication_network.get_agent_obs(neighbor_id))
return np.concatenate([local_obs, neighbor_obs])
def decide_action(self, current_phase):
obs = self.get_observation()
# 模型基于当前观察输出动作概率
action_probs = self.model.predict(obs)
chosen_action = np.argmax(action_probs)
# 将动作转换为信号灯控制指令
new_phase_duration = translate_action_to_duration(chosen_action, current_phase)
return new_phase_duration
# 在主循环中
for agent in all_traffic_light_agents:
new_duration = agent.decide_action(current_phase)
set_traffic_light_timing(agent.intersection, new_duration)
time.sleep(update_interval)
场景二:无保护左转与交叉路口通行(博弈论协商)
实现路径:
-
智能体定义: 每辆接近路口的网联自动驾驶车辆作为一个智能体(VehicleAgent)。
-
通信: 车辆通过V2V通信广播其
(位置, 速度, 加速度, 意图)元组。 -
决策: 车辆接收其他车辆的信息后,基于博弈论(如谢林点、纳什均衡)进行快速分布式计算,协商出一个所有车辆都能安全、高效通过的通行序列。
-
执行: 车辆按照协商好的序列,通过轻微的加速或减速来执行方案。
核心代码示意 (Python Pseudocode):
python
复制
下载
# 伪代码:车辆通过博弈论协商路口通行权
class VehicleAgent:
def approach_intersection(self):
# 通过V2V广播自身状态信息
v2v_message = {
'id': self.id,
'pos': self.gps.position,
'speed': self.speed,
'accel': self.acceleration,
'intent': self.intent # e.g., 'turn_left', 'go_straight'
}
v2v_broadcast(v2v_message)
# 接收其他车辆的信息
other_vehicles_info = v2v_listen()
# 基于当前所有车辆状态,计算博弈论收益矩阵
payoff_matrix = self.calculate_payoff_matrix(self, other_vehicles_info)
# 寻找纳什均衡或最合理的通行顺序 (Schelling Point)
resolution_sequence = find_nash_equilibrium(payoff_matrix)
# 根据自身在序列中的位置,计算控制命令
if resolution_sequence[0] == self.id:
# 我是第一个,匀速或略微加速通过
self.control_command = {'accel': 0.1}
else:
# 我不是第一个,计算与前车的安全距离并减速让行
leader_id = resolution_sequence[resolution_sequence.index(self.id) - 1]
leader_info = get_info_by_id(leader_id, other_vehicles_info)
safe_distance = calculate_safe_distance(self.speed, leader_info.speed)
self.control_command = self.adaptive_cruise_control(leader_info, safe_distance)
execute_control(self.control_command)
场景三:智能匝道汇流与队列行驶(协同自适应巡航控制 - CACC)
实现路径:
-
智能体定义: 主路车辆和匝道车辆都是智能体(VehicleAgent)。
-
通信: 主路车辆组成一个 Platoon(车队),通过V2V通信持续交换
(位置, 速度, 加速度)信息。 -
决策: 匝道车辆Agent发送汇入请求。主路Platoon的尾车Agent(或所有车辆)基于收到的信息,通过一致性算法协同调整速度,创造一个安全的汇入空档。
-
控制: 车辆使用CACC算法(比ACC更响应迅速,因为它使用前车传来的加速度信息而不仅仅是相对速度),精确保持车队间距。
核心代码示意 (Python Pseudocode):
python
复制
下载
# 伪代码:匝道车辆请求汇入,主路车队协同让行
class PlatoonManagerAgent: # 可以是一个虚拟的管理Agent,也可以是车队首车
def on_merge_request_received(self, merging_vehicle_info):
# 计算汇入点
merge_point = predict_merge_point(merging_vehicle_info)
# 确定汇入点前方的目标车辆和後方的跟随车辆
self.target_vehicle = find_vehicle_ahead_of(merge_point)
self.following_vehicle = find_vehicle_behind(merge_point)
# 计算需要创造的空隙大小
gap_required = calculate_required_gap()
# 向目标车辆和跟随车辆发送协调指令
v2v_send(self.target_vehicle.id, {'command': 'slightly_accel', 'value': 0.2})
v2v_send(self.following_vehicle.id, {'command': 'slightly_decel', 'value': -0.2})
# 告诉匝道车辆汇入时机和速度建议
v2v_send(merging_vehicle_info.id, {
'command': 'merge_at_speed',
'speed_suggestion': (self.target_vehicle.speed + self.following_vehicle.speed) / 2,
'gap_created': True
})
# 匝道车辆Agent
class MergingVehicleAgent:
def merge_into_highway(self):
request_msg = {'type': 'merge_request', **self.get_state_info()}
v2v_broadcast(request_msg)
# 等待主路的响应
response = wait_for_v2v_response()
if response['gap_created']:
# 调整自身速度与主路车流匹配,并在空档处汇入
self.control_speed(response['speed_suggestion'])
self.execute_lane_change()
场景四:实时动态调度(集中优化 + 分布式执行)
实现路径:
-
智能体定义: 调度中心作为中心调度Agent,每辆车作为执行Agent。
-
感知: 中心Agent通过IoT设备感知全局需求(订单、客流)和状态(车辆位置、拥堵)。
-
决策: 中心Agent使用组合优化算法(如遗传算法、蚁群算法、OR-Tools等)求解一个全局优化问题,目标函数是最小化总等待时间或总运输成本。
-
分配: 中心Agent将计算出的最优任务(如“车辆A去接订单B”)分配给各个执行Agent。
-
执行: 车辆Agent接收任务,并利用本地路径规划算法(如A、D Lite)完成点到点的行驶。
核心代码示意 (Python Pseudocode):
python
复制
下载
# 伪代码:中心调度Agent的核心优化循环
class CentralSchedulerAgent:
def __init__(self):
self.vehicles = [] # 所有车辆Agent的引用列表
self.orders = [] # 所有未分配订单的列表
def run_scheduling_cycle(self):
# 收集所有车辆的状态和位置
vehicle_states = [v.get_current_state() for v in self.vehicles]
# 收集所有待处理订单
pending_orders = self.orders
# 使用优化求解器计算最优分配方案
# assignment_matrix[i][j] 表示是否将订单j分配给车辆i
assignment_matrix = optimize_schedule(vehicle_states, pending_orders)
# 将分配结果下发
for vehicle_idx, orders_assigned in enumerate(assignment_matrix):
if any(orders_assigned):
order_list = [pending_orders[j] for j in orders_assigned]
self.vehicles[vehicle_idx].assign_orders(order_list)
# 车辆执行Agent
class VehicleAgent:
def assign_orders(self, new_orders):
self.pending_orders.extend(new_orders)
# 本地重新规划所有订单的最优接送路径序列
self.planned_route = self.solve_tsp(self.current_location, self.pending_orders)
self.navigate_to(self.planned_route[0])
场景五:全域碰撞预警(事件触发式广播)
实现路径:
-
智能体定义: 每辆车都是一个智能体(VehicleAgent)。
-
感知: 车辆通过自身传感器感知潜在危险(如紧急刹车、打滑)。
-
通信: 一旦检测到危险事件,立即通过V2V/V2I以广播形式发出预警消息(Basic Safety Message - BSM)。消息遵循标准格式(如SAE J2735),包含事件类型、位置、强度等。
-
反应: 周围车辆Agent接收到预警消息后,根据消息中的位置和自身状态,判断威胁等级。如果判定为高风险,则立即触发本地自动驾驶系统执行避险操作(如报警、减速、轻微转向)。
核心代码示意 (Python Pseudocode):
python
复制
下载
# 伪代码:基于事件触发的V2V预警广播与处理
class VehicleAgent:
def run_perception_cycle(self):
# 1. 持续本地感知
hazards = self.sensor_suite.detect_hazards() # e.g., hard_braking, obstacle_collision
for hazard in hazards:
# 2. 如果检测到危险,立即构建并广播BSM消息
bsm_msg = {
'msg_type': 'BSM',
'id': self.id,
'timestamp': time.time(),
'position': self.position,
'hazard_type': hazard.type,
'severity': hazard.severity
}
v2v_broadcast(bsm_msg) # 高优先级广播
def v2v_message_handler(self, message):
if message['msg_type'] == 'BSM':
# 3. 接收到他人的预警消息
# 计算危险事件与自身的距离和相对速度
threat_level = self.assess_threat_level(message)
if threat_level == 'HIGH':
# 4. 高风险,立即触发本地避险策略
self.activate_emergency_maneuver(message)
elif threat_level == 'MEDIUM':
# 中风险,向驾驶员发出听觉/视觉警报
self.hmi.alert_driver(f"Warning: {message['hazard_type']} ahead!")
def assess_threat_level(self, bsm_msg):
distance = calculate_distance(self.position, bsm_msg['position'])
time_to_collision = distance / (self.speed - bsm_msg['speed']) # 简化计算
if time_to_collision < 2.0: # 小于2秒
return 'HIGH'
elif time_to_collision < 5.0:
return 'MEDIUM'
else:
return 'LOW'
这些实现路径和核心代码展示了智能体技术如何将抽象的理论转化为具体的、可执行的算法,从而解决交通系统中的核心痛点。
详细阐述一个典型的交通智能体(以网联自动驾驶车辆智能体为例)的完整工作流程。这个流程体现了智能体“感知-思考-行动”的循环,并突出了其与环境的交互。
智能体工作流程详解
第一步:感知与数据融合 (Perception & Data Fusion) - “我在哪?周围有什么?”
智能体启动后,首先进入持续感知状态。这是所有决策的基础。
-
本地传感器数据采集:
-
视觉摄像头: 捕捉图像,识别车道线、交通标志、信号灯、行人、车辆等。
-
激光雷达 (LiDAR): 生成高精度3D点云图,精确测量周围物体的距离和形状。
-
毫米波雷达: 检测物体的速度和距离,不受天气影响。
-
GPS/IMU: 提供自身的全局定位、速度、朝向和加速度。
-
-
网联数据接收 (V2X):
-
通过V2V通信接收周围车辆广播的BSM消息,包含他们的位置、速度、航向、刹车状态等。这实现了“超视距”感知。
-
通过V2I通信接收路侧单元 (RSU) 发来的信息,如前方路口信号灯配时、盲区行人预警、道路施工信息等。
-
从云端接收全局交通信息,如大范围拥堵、事故、天气情况。
-
-
数据融合:
-
智能体的融合中心将来自不同源(摄像头、LiDAR、雷达、V2X)的数据进行时间对齐、坐标转换和关联。
-
剔除错误和噪声数据,生成一个唯一、可靠、全面的环境态势认知。例如,它知道左边5米处有一辆自行车(摄像头识别),速度是15km/h(雷达测速),并且这辆车正在广播它的存在(V2V确认)。
-
流程输出:一个动态更新的、包含所有相关障碍物、交通规则和道路几何的局部环境地图。
第二步:状态理解与情境评估 (State Comprehension & Situation Assessment) - “现在是什么情况?”
智能体不是简单地罗列数据,而是需要理解这些数据意味着什么。
-
对象跟踪与预测:
-
对感知到的动态物体(车辆、行人)进行跟踪,并预测其未来几秒内的轨迹。例如:“前方的车正在减速,很可能要停车。”、“右边的行人有可能闯入马路。”
-
-
自身状态评估:
-
确认自身是否在遵循交通规则(是否在车道内?是否超速?)。
-
评估当前任务的执行情况(距离下一个航点还有多远?)。
-
-
情境分类:
-
基于以上信息,智能体对当前场景进行分类和标签化。例如:
[NORMAL_CRUISING]、[APPROACHING_INTERSECTION]、[MERGING_LANE]、[LEAD_VEHICLE_BRAKING]、[PEDESTRIAN_CROSSING]。 -
这个分类将直接决定下一步需要调用哪个决策模块。
-
流程输出:对当前驾驶场景的语义化理解,包括所有参与者的预测意图和潜在风险。
第三步:决策与规划 (Decision & Planning) - “我应该怎么做?”
这是智能体的“大脑”核心。决策通常分为三层:
-
路由规划 (Route Planning - 战略层):
-
基于云端提供的地图和交通信息,规划从起点到终点的全局最优路径。这个层级的决策以分钟或公里计,通常在行程开始前或重大 reroute 时进行。
-
-
行为决策 (Behavioral Decision - 战术层):
-
根据情境评估的结果,在毫秒到秒级内做出高层行为选择。
-
这是一个基于规则或机器学习模型的决策过程。
-
示例决策:
[LANE_CHANGE_LEFT]、[FOLLOW]、[YIELD]、[OVERTAKE]、[STOP_AT_INTERSECTION]。
-
-
运动规划 (Motion Planning - 执行层):
-
将行为决策转化为一条具体、平滑、安全、舒适的时空轨迹。
-
考虑动力学约束、交通规则和舒适度。
-
常用算法:Hybrid A*, 状态格子(State Lattice), 优化算法。
-
输出是一条由一系列路径点组成的轨迹,每个点都包含了时间、位置、速度、加速度信息。
-
流程输出:一条未来数秒内可供执行的详细时空轨迹。
第四步:协同与通信 (Cooperation & Communication) - “我和别人怎么配合?”
在做出决策的同时或之后,智能体会与其他智能体进行协同。
-
意图共享:
-
通过V2V广播自己的决策意图(例如:“我计划在3秒后向左变道”),而不仅仅是状态数据。这让周围的智能体能够预测你的行为,从而实现协同。
-
-
协商:
-
在冲突场景(如无保护左转),通过交换提议进行分布式协商(“你先过?”/“我先过?”),快速达成一致,避免死锁。
-
-
接收与处理他人信息:
-
同样,它也接收并处理其他智能体的意图广播,并据此调整自己的决策和规划。例如,收到后方车辆要超车的意图,本车可以稍作减速让其通过,使整体交通更流畅安全。
-
流程输出:更新后的协同决策和规划(如果需要调整)。
第五步:控制与执行 (Control & Execution) - “执行计划!”
将规划好的轨迹转化为车辆的实际控制命令。
-
轨迹跟踪:
-
控制器(如PID控制器、模型预测控制器MPC)计算所需的油门、刹车、方向盘转角控制量,使车辆能够精确地跟踪规划出的轨迹。
-
-
执行器操作:
-
控制命令通过线控系统发送给车辆的执行机构(油门、制动、转向系统),车辆开始物理运动。
-
流程输出:车辆的实际物理运动。
第六步:学习与适应 (Learning & Adaptation) - “我下次怎么能做得更好?”(可选但高级)
一个更先进的智能体会从经验中学习。
-
离线学习: 将驾驶数据(状态、决策、结果)上传至云端,用于集中训练和改进整个智能体群体的决策模型。
-
在线学习: 根据本次循环的执行结果(例如:变道是否舒适?预测是否准确?)微调本地模型,更好地适应本地驾驶风格或特殊路况。
流程输出:更新、更优的智能体内部模型。
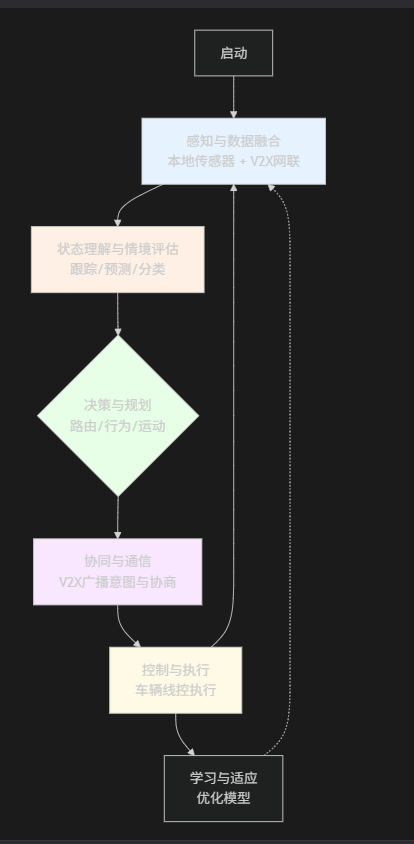
工作流程总结图
图表
代码
下载
启动
感知与数据融合
本地传感器 + V2X网联
状态理解与情境评估
跟踪/预测/分类
决策与规划
路由/行为/运动
协同与通信
V2X广播意图与协商
控制与执行
车辆线控执行
学习与适应
优化模型
这个“感知-融合-评估-决策-协同-控制-学习”的循环以极高的频率(通常为10-100Hz)持续运行,确保智能体能够应对瞬息万变的交通环境,实现安全、高效、舒适的自主驾驶。这就是智能体在交通系统中工作的核心逻辑。
更多推荐

 41
41 0
0- 0



 已为社区贡献105条内容
已为社区贡献105条内容

所有评论(0)