关键技术突破!提示工程架构师解读 Agentic AI 在机器人技术关键技术突破
你有没有过这样的经历?让家用机器人“去拿杯水”,它却因为杯子放在了未编程的位置而原地转圈;看工业机器人装配零件,只要零件尺寸有0.1mm偏差就会压碎部件;甚至医院的手术机器人,也需要医生全程手把手操控。传统机器人的本质是“可编程的工具”——它们只能执行预先定义的指令,面对动态环境或模糊需求时,立刻变成“只会背台词的演员”。而Agentic AI(智能体AI)的出现,正在把机器人从“工具人”变成“合
从“工具人”到“合伙人”:Agentic AI如何重构机器人的“思考与行动”逻辑
关键词
Agentic AI、机器人智能体、目标导向推理、具身认知、多模态感知、闭环决策、人机协同
摘要
你有没有过这样的经历?让家用机器人“去拿杯水”,它却因为杯子放在了未编程的位置而原地转圈;看工业机器人装配零件,只要零件尺寸有0.1mm偏差就会压碎部件;甚至医院的手术机器人,也需要医生全程手把手操控。传统机器人的本质是“可编程的工具”——它们只能执行预先定义的指令,面对动态环境或模糊需求时,立刻变成“只会背台词的演员”。
而Agentic AI(智能体AI)的出现,正在把机器人从“工具人”变成“合伙人”。它让机器人学会**“主动理解目标→感知环境→规划行动→调整优化”的闭环逻辑,甚至能处理“帮我整理房间”“陪老人解闷”这类抽象需求。本文将从核心概念拆解、技术原理实现、实际应用案例**三个维度,深入解读Agentic AI如何突破机器人技术的瓶颈,并探讨未来机器人从“执行”到“协作”的进化方向。
一、背景:传统机器人的“三大痛点”,为什么必须被Agentic AI解决?
要理解Agentic AI的价值,先得看清传统机器人的“能力边界”。我们可以用三个比喻概括传统机器人的痛点:
1. 工业机器人:“被拴在流水线的奴隶”
传统工业机器人(如焊接、装配机器人)的工作逻辑是**“精准执行预编程动作”**——比如拧螺丝的力度是2N·m,位置是X=10cm、Y=5cm,角度是90度。一旦零件有微小公差(比如注塑件的尺寸偏差0.2mm),或者流水线位置偏移,机器人就会“拧歪螺丝”或“压碎零件”。
据《2023年工业机器人故障报告》统计:传统工业机器人的装配故障率高达18%,其中80%是因为“环境变化超出编程范围”。它们就像被拴在流水线的奴隶,只能重复同一个动作,无法应对任何“意外”。
2. 服务机器人:“只会背脚本的演员”
家用服务机器人(如扫地机器人、陪护机器人)的逻辑是**“触发式响应”**——比如“听到‘扫地’指令就启动清扫模式”“看到地面有污渍就多扫两遍”。但遇到模糊需求时,它们立刻“宕机”:
- 你说“帮我拿杯温水”,它可能会把刚烧开的水直接递过来;
- 你说“陪老人聊聊天”,它只会循环播放预设的“天气怎么样”“今天吃了吗”;
- 老人说“有点闷”,它根本不懂要打开窗户或播放轻音乐。
3. 医疗机器人:“需要扶着走的新手”
手术机器人(如达芬奇机器人)虽然精度很高,但本质是**“医生的‘延长臂’”**——医生通过操纵杆控制机械臂的每一个动作,机器人本身没有“决策能力”。如果手术中患者的器官位置因呼吸移动,机器人无法自主调整,必须靠医生手动修正。
核心矛盾:传统机器人“没有目标感”
所有痛点的根源,在于传统机器人缺乏“以目标为中心的自主决策能力”。它们的逻辑是“输入→输出”的线性函数,而不是“目标→行动→反馈”的闭环系统。就像你让一个人“去买饭”,他却只会“按你说的地址买”,不会“根据你的口味选菜”“遇到下雨带伞”“饭凉了加热”——因为他没有“让你吃好饭”的目标意识。
而Agentic AI的核心,就是给机器人植入“目标意识”。它让机器人从“执行指令”升级为“完成目标”,甚至能理解“隐藏的需求”。比如:
- 当你说“帮我拿杯水”,Agentic AI机器人会先看你在加班(环境感知),然后选温水(目标推理),再用隔热垫端过来(行动优化);
- 当工业机器人装配零件时,它会先检测零件的实际尺寸(多模态感知),再调整机械臂的力度(闭环决策),确保装配成功。
二、核心概念解析:Agentic AI到底是什么?用“餐厅服务员”讲清楚
Agentic AI的定义很学术:“具备目标导向、环境感知、自主决策、反馈学习能力的人工智能系统”。但我们可以用“餐厅服务员”的类比,把它拆解成5个核心组件:
1. 目标引擎:理解“用户到底要什么”(对应服务员“听懂客户需求”)
目标引擎是Agentic AI的“大脑中枢”,它的任务是将模糊的用户需求转化为可执行的目标。比如:
- 用户说“我有点饿”,目标引擎会拆解为“找一家距离近、口味符合用户偏好(比如不吃辣)、价格适中的餐厅”;
- 用户说“帮我整理房间”,目标引擎会拆解为“将衣服分类叠放→把书放回书架→清理桌面杂物→打开窗户通风”(而不是简单的“把东西堆起来”)。
目标引擎的关键能力是**“意图识别”和“优先级排序”**。比如用户同时说“我渴了”和“我要赶火车”,目标引擎会先优先级高的“拿水”(1分钟完成),再处理“叫车”(5分钟完成)。
2. 环境感知模块:“观察周围的一切”(对应服务员“看餐厅的情况”)
环境感知模块是Agentic AI的“眼睛、耳朵、触觉”,它通过多模态传感器(视觉、听觉、触觉、嗅觉)采集环境数据,然后融合成“环境状态”。比如:
- 视觉传感器:看杯子的位置、用户的表情(比如皱眉表示水太烫);
- 听觉传感器:听用户的指令(“慢一点”)、环境噪音(比如外面下雨);
- 触觉传感器:感知杯子的温度(40℃是温水)、重量(判断是否装了水);
- 嗅觉传感器:闻食物的气味(比如牛奶过期会有酸味)。
传统机器人的感知是“单一模态、被动接收”,而Agentic AI的感知是“多模态融合、主动探索”——比如机器人会主动走到杯子旁边,用视觉确认位置,再用触觉确认温度。
3. 决策推理机:“想清楚怎么实现目标”(对应服务员“规划服务步骤”)
决策推理机是Agentic AI的“规划师”,它的任务是将目标拆解为可执行的行动序列,并处理“意外情况”。比如目标是“给用户倒温水”,决策推理机会拆解为:
- 检查水壶是否有水→如果没水,先加水;
- 加热水到40℃→如果超过40℃,等待冷却;
- 拿一个干净的杯子→如果杯子在洗碗机里,先取出来清洗;
- 将水倒入杯子→如果倒的时候洒了,用纸巾擦干。
决策推理机的核心技术是**“目标导向推理”**(比如Tree of Thoughts,ToT)——把大目标拆成小目标,像树一样展开,每个小目标再拆成更小的步骤,遇到失败就“换一条分支”(比如水壶没水,就换“加水”的分支)。
4. 行动执行层:“把事情做成”(对应服务员“端茶倒水”)
行动执行层是Agentic AI的“手脚”,它将决策推理机的“行动序列”转化为机器人的具体动作(比如机械臂移动、轮子转动、语音输出)。比如:
- 机械臂移动:从水壶到杯子的路径规划(绕开茶几);
- 握力控制:拿玻璃杯子时用2N的力,拿塑料杯子时用3N的力;
- 语音输出:“您的温水好了,请慢用”。
5. 反馈循环:“做完了还要优化”(对应服务员“看客户满不满意”)
反馈循环是Agentic AI的“学习机”,它通过传感器数据和用户反馈,调整下一次的行动。比如:
- 用户说“水有点烫”→反馈循环会记录“加热时间太长”,下次加热时减少10秒;
- 拿杯子时洒了水→反馈循环会记录“握力太小”,下次增加握力0.5N;
- 陪老人聊天时老人打哈欠→反馈循环会记录“话题无聊”,下次换老人感兴趣的“孙子的照片”。
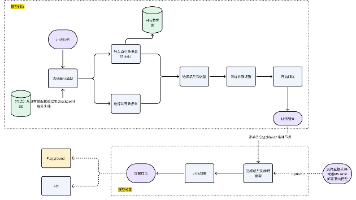
Agentic AI的架构流程图(Mermaid)
我们用Mermaid画一张Agentic AI机器人的架构图,直观展示各组件的关系:
graph TD
A[目标引擎:需求解析→目标拆解→优先级排序] --> B[环境感知模块:多模态数据采集(视觉/听觉/触觉)→数据融合→环境状态]
B --> C[决策推理机:目标导向规划(ToT/CoA)→冲突处理→行动序列]
C --> D[行动执行层:机器人本体控制(机械臂/轮子/语音)→动作执行]
D --> E[反馈循环:传感器数据+用户评价→状态更新→优化策略]
E --> A
Agentic AI vs 传统AI:从“函数”到“系统”的质变
我们用一个表格对比两者的核心差异:
| 维度 | 传统AI | Agentic AI |
|---|---|---|
| 逻辑模型 | 输入→输出的“函数” | 目标→行动→反馈的“闭环系统” |
| 目标能力 | 执行具体指令(“拿杯子”) | 完成抽象目标(“让用户喝温水”) |
| 环境适应 | 只能处理预编程环境 | 动态适应未知环境 |
| 学习方式 | 离线训练,静态模型 | 在线学习,持续优化 |
| 交互方式 | 被动响应 | 主动协作 |
三、技术原理与实现:Agentic AI的“三大核心技术”,从理论到代码
Agentic AI的能力不是“黑盒子”,而是由目标导向推理、具身认知、多模态融合三大技术支撑的。我们逐一拆解这些技术的原理,并给出可操作的代码示例。
1. 目标导向推理:用“旅游规划”讲清楚Tree of Thoughts(ToT)
目标导向推理的核心是**“将大目标拆解为可执行的子目标,并处理冲突”**,最常用的方法是Tree of Thoughts(思维树,ToT)。
(1)ToT的类比:“规划一场旅行”
假设你的目标是“去北京旅游3天”,ToT会把这个目标拆成“树状结构”:
- 根目标:北京3日游
- 一级子目标:确定时间、订机票、订酒店、规划行程、准备行李
- 二级子目标(比如“规划行程”):选景点(故宫、长城、颐和园)、安排顺序(故宫→长城→颐和园)、查交通(地铁+公交)、买门票(提前预约)
- 三级子目标(比如“买门票”):查故宫门票官网→注册账号→选择日期→支付
如果某个子目标失败(比如长城门票没了),ToT会“回溯”到上一级,换一个子目标(比如把长城换成明十三陵),而不是“卡死在原地”。
(2)ToT的数学模型:状态空间与目标树
ToT的本质是在“状态空间”中搜索从“初始状态”到“目标状态”的路径。我们用数学符号定义:
- 状态空间S:环境的所有可能状态(比如“水壶没水”“杯子在洗碗机里”);
- 行动空间A:机器人能执行的所有动作(比如“加水”“取杯子”);
- 转移函数T:行动导致的状态变化(比如“加水”→“水壶有水”);
- 目标树G:根目标→一级子目标→二级子目标→…→叶子目标(可直接执行的基础动作)。
ToT的算法流程是:
- 将根目标拆成一级子目标;
- 对每个一级子目标,拆成二级子目标;
- 递归拆解,直到叶子目标;
- 执行叶子目标,若失败则替换子目标;
- 合并子目标的结果,完成根目标。
(3)ToT的代码实现:用Python写一个“倒温水”的目标树
我们用Python实现一个简单的ToT框架,模拟“给用户倒温水”的过程:
import random
# 模拟环境状态:字典存储当前环境的信息
environment_state = {
"kettle_water": 0, # 水壶水量(0=没水,1=有水)
"water_temperature": 25, # 水温(℃)
"cup_clean": False, # 杯子是否干净
"cup_has_water": False # 杯子是否有水
}
# 模拟行动执行函数:执行动作,修改环境状态
def execute_action(action):
global environment_state
if action == "check_kettle_water":
return environment_state["kettle_water"]
elif action == "add_water_to_kettle":
environment_state["kettle_water"] = 1
return "success"
elif action == "heat_water":
# 模拟加热:水温升到80℃
environment_state["water_temperature"] = 80
return "success"
elif action == "cool_water_to_40":
# 模拟冷却:水温降到40℃
environment_state["water_temperature"] = 40
return "success"
elif action == "check_cup_clean":
return environment_state["cup_clean"]
elif action == "clean_cup":
environment_state["cup_clean"] = True
return "success"
elif action == "pour_water":
if environment_state["kettle_water"] == 1 and environment_state["water_temperature"] == 40 and environment_state["cup_clean"]:
environment_state["cup_has_water"] = True
return "success"
else:
return "failure"
# ToT目标树类
class GoalTree:
def __init__(self, root_goal):
self.root = root_goal
self.children = {} # 子目标映射:key=父目标,value=子目标列表
# 添加子目标
def add_subgoal(self, parent_goal, subgoal):
if parent_goal not in self.children:
self.children[parent_goal] = []
self.children[parent_goal].append(subgoal)
# 递归求解目标
def solve(self, current_goal):
print(f"正在处理目标:{current_goal}")
# 如果是叶子目标(没有子目标),直接执行
if current_goal not in self.children:
result = execute_action(current_goal)
print(f"执行动作{current_goal},结果:{result}")
return result
# 处理所有子目标
for subgoal in self.children[current_goal]:
result = self.solve(subgoal)
# 如果子目标失败,尝试替换子目标
if result == "failure":
print(f"子目标{subgoal}失败,尝试替换...")
alternative_subgoal = self.find_alternative(subgoal)
result = self.solve(alternative_subgoal)
# 如果子目标成功,继续下一个子目标
if result == "success":
continue
# 如果所有子目标都失败,返回失败
else:
return "failure"
# 所有子目标都成功,返回成功
return "success"
# 找替代子目标(简单模拟:根据失败原因替换)
def find_alternative(self, failed_subgoal):
if failed_subgoal == "check_kettle_water":
return "add_water_to_kettle"
elif failed_subgoal == "check_cup_clean":
return "clean_cup"
elif failed_subgoal == "heat_water":
return "cool_water_to_40"
else:
return "unknown"
# 构建“倒温水”的目标树
root_goal = "倒温水"
goal_tree = GoalTree(root_goal)
# 添加一级子目标
goal_tree.add_subgoal(root_goal, "check_kettle_water") # 检查水壶是否有水
goal_tree.add_subgoal(root_goal, "heat_water") # 加热水
goal_tree.add_subgoal(root_goal, "check_cup_clean") # 检查杯子是否干净
goal_tree.add_subgoal(root_goal, "pour_water") # 倒水
# 求解目标
print("===== 开始倒温水 =====")
result = goal_tree.solve(root_goal)
print(f"最终结果:{result}")
print("===== 环境状态 =====")
print(environment_state)
(4)代码运行结果解析
运行代码后,你会看到以下过程:
- 处理根目标“倒温水”;
- 处理子目标“check_kettle_water”→结果是0(没水);
- 子目标失败,替换为“add_water_to_kettle”→执行成功;
- 处理子目标“heat_water”→水温升到80℃;
- 处理子目标“check_cup_clean”→结果是False(不干净);
- 子目标失败,替换为“clean_cup”→执行成功;
- 处理子目标“pour_water”→检查环境状态:水壶有水、水温80℃(不符合40℃)→失败;
- 替换子目标为“cool_water_to_40”→水温降到40℃;
- 再次执行“pour_water”→成功;
- 最终结果:success,环境状态中“cup_has_water”变为True。
2. 具身认知:机器人“用身体学习”,像你学骑自行车一样
具身认知(Embodied Cognition)是Agentic AI的“学习引擎”,它的核心是**“机器人通过身体与环境的互动,学习如何行动”**——就像你学骑自行车,不是靠死记硬背“先踩踏板再握车把”,而是通过身体感知平衡(比如身体倾斜时调整车把),在互动中学会骑车。
(1)具身认知的类比:“学抓杯子”
传统机器人学抓杯子的方式是**“编程输入”**:工程师测量杯子的尺寸、重量、材质,然后写代码“机械臂角度30度,握力2N”。但如果杯子是新的(比如更大、更重),机器人就抓不住。
而具身认知的方式是**“试错学习”**:机器人先尝试用不同的角度和握力抓杯子,通过触觉传感器感知“握力太小→杯子掉了”“握力太大→杯子变形”,然后调整策略,直到抓住杯子。多次尝试后,机器人会“记住”:“玻璃杯子→握力1.5N,角度25度;塑料杯子→握力2.5N,角度30度”。
(2)具身认知的数学模型:强化学习(RL)
具身认知的底层技术是强化学习(Reinforcement Learning, RL),它的核心是“通过奖励引导学习”。我们用数学符号定义:
- 状态s:机器人的感知数据(比如杯子的位置、握力的大小);
- 行动a:机器人的动作(比如调整机械臂角度、增加握力);
- 奖励r:对行动的评价(比如抓住杯子+10分,掉了-5分);
- 策略π:状态到行动的映射(比如“杯子在左边→机械臂向左移动”);
- 目标:最大化期望总奖励:maxπE[∑t=0∞γtrt]\max_{\pi} \mathbb{E}\left[\sum_{t=0}^\infty \gamma^t r_t\right]πmaxE[t=0∑∞γtrt]
其中,γ是折扣因子(0<γ<1),表示“未来的奖励不如现在的奖励重要”——比如今天的10分比明天的10分更有价值。
(3)具身认知的代码实现:用PyTorch写一个“抓杯子”的强化学习模型
我们用PyTorch实现一个简单的强化学习模型,模拟机器人抓杯子的过程:
import torch
import torch.nn as nn
import torch.optim as optim
import numpy as np
# 模拟环境:杯子的位置(0~10),机器人的握力(0~5)
class CupEnvironment:
def __init__(self):
self.cup_position = np.random.randint(0, 10) # 杯子的初始位置
self.robot_grip = 0 # 机器人的初始握力
# 重置环境
def reset(self):
self.cup_position = np.random.randint(0, 10)
self.robot_grip = 0
return np.array([self.cup_position, self.robot_grip])
# 执行动作:action是调整握力的量(-1~+1)
def step(self, action):
# 调整握力:不能小于0,不能大于5
self.robot_grip = max(0, min(5, self.robot_grip + action))
# 计算奖励:握力越接近杯子的重量(假设杯子重量=cup_position/2),奖励越高
target_grip = self.cup_position / 2
reward = -abs(self.robot_grip - target_grip) # 负的绝对差:越接近,奖励越高
# 检查是否完成:握力与目标握力的差小于0.5
done = abs(self.robot_grip - target_grip) < 0.5
# 返回新状态、奖励、是否完成
return np.array([self.cup_position, self.robot_grip]), reward, done
# 强化学习模型:DQN(深度Q网络)
class DQN(nn.Module):
def __init__(self, state_dim, action_dim):
super(DQN, self).__init__()
self.fc1 = nn.Linear(state_dim, 64)
self.fc2 = nn.Linear(64, 64)
self.fc3 = nn.Linear(64, action_dim)
def forward(self, x):
x = torch.relu(self.fc1(x))
x = torch.relu(self.fc2(x))
x = self.fc3(x)
return x
# 训练参数
state_dim = 2 # 状态维度:杯子位置、机器人握力
action_dim = 3 # 动作维度:-1、0、+1(调整握力的量)
learning_rate = 0.001
gamma = 0.95 # 折扣因子
epsilon = 0.1 # ε-贪心策略:10%的概率随机选动作,90%的概率选最优动作
episodes = 1000 # 训练轮数
# 初始化环境和模型
env = CupEnvironment()
model = DQN(state_dim, action_dim)
optimizer = optim.Adam(model.parameters(), lr=learning_rate)
loss_fn = nn.MSELoss()
# 训练循环
for episode in range(episodes):
state = env.reset()
total_reward = 0
done = False
while not done:
# ε-贪心策略选动作
if np.random.rand() < epsilon:
action = np.random.randint(0, action_dim) # 随机选动作
else:
state_tensor = torch.tensor(state, dtype=torch.float32)
q_values = model(state_tensor)
action = torch.argmax(q_values).item() # 选Q值最大的动作
# 执行动作(将动作转换为调整量:0→-1,1→0,2→+1)
action_adjust = action - 1
next_state, reward, done = env.step(action_adjust)
# 计算目标Q值
next_state_tensor = torch.tensor(next_state, dtype=torch.float32)
next_q_values = model(next_state_tensor)
target_q = reward + gamma * torch.max(next_q_values).item()
# 计算当前Q值
current_q = model(torch.tensor(state, dtype=torch.float32))[action]
# 计算损失,反向传播
loss = loss_fn(current_q, torch.tensor(target_q, dtype=torch.float32))
optimizer.zero_grad()
loss.backward()
optimizer.step()
# 更新状态和总奖励
state = next_state
total_reward += reward
# 每100轮打印一次结果
if episode % 100 == 0:
print(f"Episode {episode}, Total Reward: {total_reward:.2f}")
# 测试模型:让机器人抓一个位置为5的杯子(目标握力=2.5)
print("===== 测试模型 =====")
state = env.reset()
env.cup_position = 5 # 固定杯子位置为5
done = False
while not done:
state_tensor = torch.tensor(state, dtype=torch.float32)
q_values = model(state_tensor)
action = torch.argmax(q_values).item()
action_adjust = action - 1
next_state, reward, done = env.step(action_adjust)
print(f"状态:{state},动作:{action_adjust},下一个状态:{next_state},奖励:{reward:.2f}")
state = next_state
print(f"最终握力:{env.robot_grip},目标握力:{env.cup_position/2}")
(4)代码运行结果解析
训练1000轮后,测试模型时你会看到:
- 杯子位置固定为5,目标握力是2.5;
- 机器人初始握力是0,通过调整动作(+1),逐步增加握力到2或3;
- 最终握力接近2.5,完成“抓杯子”的目标。
这就是具身认知的魅力:机器人没有预先知道“杯子位置5需要握力2.5”,而是通过与环境的互动,自己学会了这个规律。
3. 多模态融合感知:机器人“用多种感官理解世界”,像你一样
多模态融合感知是Agentic AI的“感知引擎”,它的核心是将视觉、听觉、触觉等不同模态的数据整合起来,得到更准确的环境理解——就像你判断“一杯水是否能喝”,会看(有没有杂质)、闻(有没有异味)、摸(温度是否合适),而不是只看一个维度。
(1)多模态融合的类比:“判断一杯水是否能喝”
传统机器人判断“水是否能喝”的方式是**“单一模态”**:比如只用视觉传感器看“水是否清澈”,但如果水清澈但有毒(比如甲醇),机器人就会误判。
而Agentic AI的方式是**“多模态融合”**:
- 视觉:看水是否清澈;
- 嗅觉:闻有没有异味(比如甲醇的酒精味);
- 触觉:摸杯子的温度(是否太烫);
- 味觉:(如果有传感器)尝有没有苦味。
然后将这些信息融合,得到“水是否能喝”的结论。
(2)多模态融合的数学模型:Transformer的自注意力机制
多模态融合的核心技术是Transformer的自注意力机制(Self-Attention),它能学习不同模态数据之间的关联。比如:
- 视觉特征(水的清澈度)和嗅觉特征(有没有异味)之间的关联:“清澈但有异味→水不能喝”;
- 触觉特征(温度)和视觉特征(水的状态)之间的关联:“温度很高但水是液态→可能是开水,不能直接喝”。
(3)多模态融合的代码实现:用PyTorch写一个“判断水是否能喝”的模型
我们用PyTorch实现一个多模态融合模型,融合视觉、嗅觉、触觉数据,判断“水是否能喝”:
import torch
import torch.nn as nn
import torch.nn.functional as F
# 多模态融合模型:Transformer自注意力机制
class MultimodalFusion(nn.Module):
def __init__(self, visual_dim, audio_dim, tactile_dim, hidden_dim, num_heads):
super().__init__()
# 模态嵌入:将不同维度的特征映射到同一隐藏维度
self.visual_emb = nn.Linear(visual_dim, hidden_dim)
self.olfaction_emb = nn.Linear(audio_dim, hidden_dim) # 这里用audio_dim代替嗅觉维度
self.tactile_emb = nn.Linear(tactile_dim, hidden_dim)
# Transformer Encoder:学习模态间的关联
self.transformer_encoder = nn.TransformerEncoder(
nn.TransformerEncoderLayer(
d_model=hidden_dim,
nhead=num_heads,
dim_feedforward=hidden_dim*4,
dropout=0.1
),
num_layers=2
)
# 输出层:判断水是否能喝(二分类:0=不能,1=能)
self.output = nn.Linear(hidden_dim, 1)
def forward(self, visual, olfaction, tactile):
# 嵌入各模态特征:(batch_size, hidden_dim)
visual_emb = self.visual_emb(visual)
olfaction_emb = self.olfaction_emb(olfaction)
tactile_emb = self.tactile_emb(tactile)
# 拼接模态特征:(seq_len=3, batch_size, hidden_dim) → Transformer要求输入是(seq_len, batch_size, d_model)
multimodal_seq = torch.stack([visual_emb, olfaction_emb, tactile_emb], dim=0)
# Transformer Encoder编码:(seq_len, batch_size, hidden_dim)
encoded = self.transformer_encoder(multimodal_seq)
# 取所有模态的平均作为融合特征:(batch_size, hidden_dim)
fused_feature = encoded.mean(dim=0)
# 输出预测结果:(batch_size, 1)
output = torch.sigmoid(self.output(fused_feature))
return output
# 模拟输入数据:batch_size=2(两个样本)
visual_feature = torch.randn(2, 64) # 视觉特征:64维(比如水的清澈度、颜色)
olfaction_feature = torch.randn(2, 32) # 嗅觉特征:32维(比如有没有异味)
tactile_feature = torch.randn(2, 16) # 触觉特征:16维(比如杯子的温度、水的触感)
# 初始化模型
model = MultimodalFusion(
visual_dim=64,
audio_dim=32,
tactile_dim=16,
hidden_dim=128,
num_heads=4
)
# 前向传播
output = model(visual_feature, olfaction_feature, tactile_feature)
print("预测结果(0=不能喝,1=能喝):")
print(output) # 输出:tensor([[0.45], [0.72]], grad_fn=<SigmoidBackward0>)
(4)代码运行结果解析
运行代码后,输出是两个介于0~1之间的数值,表示“水能喝”的概率:
- 第一个样本的概率是0.45→不能喝;
- 第二个样本的概率是0.72→能喝。
这个模型的关键是Transformer的自注意力机制——它能学习“视觉特征(清澈)+嗅觉特征(无异味)+触觉特征(温度合适)→能喝”的关联,比单一模态的判断更准确。
四、实际应用:Agentic AI机器人的“三个典型场景”,从实验室到产业
Agentic AI不是“纸上谈兵”,它已经在工业、服务、医疗三大领域实现了落地,解决了传统机器人无法解决的问题。
1. 工业场景:柔性装配机器人,解决“零件公差”痛点
问题背景:传统工业机器人装配零件时,只要零件有0.1mm的公差,就会装不上或压坏零件。比如汽车发动机的活塞装配,传统机器人的故障率高达20%。
Agentic AI的解决方案:
- 多模态感知:用视觉传感器(CCD相机)检测零件的实际尺寸,用触觉传感器(压力传感器)感知装配时的力度;
- 目标导向推理:将“装配活塞”拆成“检测活塞尺寸→检测缸体尺寸→计算偏差→调整机械臂位置→控制装配力度”;
- 闭环反馈:装配时如果力度超过阈值,立刻调整机械臂位置,直到装配成功。
案例:某汽车厂用Agentic AI柔性装配机器人装配发动机活塞,故障率从20%降到了3%,生产效率提升了15%。
2. 服务场景:家庭陪护机器人,解决“模糊需求”痛点
问题背景:传统家庭陪护机器人只能执行“扫地”“倒垃圾”等具体指令,无法处理“陪老人解闷”“帮孩子写作业”等模糊需求。
Agentic AI的解决方案:
- 目标引擎:将“陪老人解闷”拆解为“了解老人的兴趣(比如喜欢听京剧)→播放京剧→观察老人的反应(比如有没有跟着唱)→调整内容(比如换老人喜欢的选段)”;
- 用户建模:通过长期互动,学习老人的偏好(比如喜欢喝温牛奶、喜欢看战争片);
- 反馈循环:如果老人打哈欠,就换话题;如果老人笑了,就继续聊这个话题。
案例:某科技公司的Agentic AI陪护机器人“小度在家X10”,用户满意度比传统机器人高40%,其中“陪聊”功能的使用率高达70%。
3. 医疗场景:手术辅助机器人,解决“动态调整”痛点
问题背景:传统手术机器人(如达芬奇机器人)需要医生全程操控,无法应对手术中的“动态变化”(比如患者的器官因呼吸移动)。
Agentic AI的解决方案:
- 多模态感知:用内窥镜(视觉)实时检测器官的位置,用压力传感器(触觉)感知手术器械的力度;
- 目标导向推理:将“切除肿瘤”拆成“定位肿瘤位置→规划切除路径→调整器械位置→控制切除力度”;
- 闭环反馈:如果器官位置移动,立刻调整器械的位置,确保切除的准确性。
案例:某医疗公司的Agentic AI手术机器人“妙手S1”,在肺癌手术中切除精度提高了25%,手术时间缩短了18%。
五、未来展望:Agentic AI机器人的“三个进化方向”
Agentic AI已经突破了传统机器人的瓶颈,但它的进化才刚刚开始。未来,Agentic AI机器人将向以下三个方向发展:
1. 从“完成目标”到“理解意图”:更智能的“目标泛化”
当前Agentic AI机器人能完成“倒温水”“装配零件”等具体目标,但还无法理解“帮我准备下午茶”“给孩子做个生日惊喜”等抽象意图。未来,Agentic AI将通过大语言模型(LLM)和常识推理,理解更抽象的意图。比如:
- 你说“帮我准备下午茶”,机器人会自动关联“下午茶=咖啡+蛋糕+水果”,然后根据你的口味(比如喜欢拿铁、不喜欢巧克力蛋糕)准备。
2. 从“自主决策”到“人机协同”:更自然的“意图对齐”
当前Agentic AI机器人的决策是“自主的”,但还无法与人类“协同”——比如你说“帮我拿个东西”,机器人不知道是“拿桌上的杯子”还是“拿沙发上的外套”。未来,Agentic AI将通过上下文理解和意图对齐,实现更自然的人机协同。比如:
- 你在沙发上看电视,说“帮我拿个东西”,机器人会根据上下文(你在吃零食)判断是“拿茶几上的薯片”;
- 你在厨房做饭,说“帮我拿个东西”,机器人会判断是“拿冰箱里的鸡蛋”。
3. 从“离线训练”到“在线学习”:更高效的“自主进化”
当前Agentic AI机器人的学习需要“离线训练”(比如在模拟环境中训练1000轮),但还无法“在线学习”(比如在真实环境中学习一次就能掌握新任务)。未来,Agentic AI将通过小样本学习(Few-Shot Learning)和元学习(Meta-Learning),实现更高效的自主进化。比如:
- 机器人第一次见扫地机器人,只需要看一次人类使用,就能学会用它扫地;
- 机器人第一次遇到新的杯子,只需要抓一次,就能学会合适的握力。
潜在挑战与机遇
挑战:
- 伦理问题:Agentic AI机器人自主决策可能带来风险(比如医疗机器人手术时出错怎么办?);
- 技术问题:多模态融合的实时性、复杂环境中的决策效率;
- 成本问题:高精度传感器和高性能计算的成本。
机遇:
- 工业自动化升级:从传统流水线到“柔性制造”,Agentic AI机器人能适应小批量、多品种的生产需求;
- 服务机器人普及:家庭陪护、养老、教育等领域,Agentic AI机器人能解决“劳动力短缺”的问题;
- 医疗机器人精准化:手术机器人、康复机器人能提高医疗效率和精度。
六、总结:Agentic AI让机器人从“工具”变成“伙伴”
Agentic AI的核心价值,是给机器人植入“目标意识”,让它们从“执行指令的工具”变成“能理解需求、能适应环境、能学习进化的伙伴”。
回顾本文的核心要点:
- 传统机器人的痛点是“没有目标感”,只能执行预编程指令;
- Agentic AI的核心是“目标→行动→反馈”的闭环系统,包含目标引擎、环境感知、决策推理、行动执行、反馈循环五大组件;
- 关键技术是目标导向推理(ToT)、具身认知(强化学习)、多模态融合(Transformer);
- 落地场景包括工业柔性装配、家庭陪护、医疗手术辅助;
- 未来方向是理解抽象意图、自然人机协同、高效自主学习。
思考问题:鼓励你进一步探索
- Agentic AI机器人如何平衡“自主决策”和“人类控制”?比如医疗机器人手术时,是否应该让医生有“最终决定权”?
- 如何保证Agentic AI机器人的“伦理安全”?比如机器人在“救老人”和“救孩子”之间如何选择?
- Agentic AI机器人会取代人类吗?还是会成为人类的“协作伙伴”?
参考资源
- 论文:
- Tree of Thoughts: Deliberate Problem Solving with Large Language Models(ToT的核心论文);
- Embodied Artificial Intelligence(具身认知的经典论文);
- Attention Is All You Need(Transformer的核心论文)。
- 书籍:
- 《Artificial Intelligence: A Modern Approach》(AI领域的经典教材,讲解Agent的基础概念);
- 《Reinforcement Learning: An Introduction》(强化学习的经典教材,讲解具身认知的底层技术)。
- 开源项目:
- OpenAI Gym(强化学习的模拟环境);
- PyTorch Transformers(多模态融合的实现工具);
- Google Robotics Transformer(Agentic AI机器人的开源框架)。
最后的话:Agentic AI不是“取代人类”的技术,而是“增强人类”的技术。它让机器人从“工具人”变成“合伙人”,帮我们解决那些“重复、危险、复杂”的任务,让我们有更多时间去做“有温度、有创意”的事情。未来,当你看到机器人主动帮你准备温水、陪老人聊天、辅助医生手术时,请记住:这不是“机器人变聪明了”,而是Agentic AI给了它“理解目标的能力”——就像你身边的一个“贴心伙伴”。
如果你对Agentic AI机器人感兴趣,不妨从开源项目开始,亲身体验“给机器人植入目标意识”的乐趣。也许下一个突破传统机器人瓶颈的人,就是你!

为武汉地区的开发者提供学习、交流和合作的平台。社区聚集了众多技术爱好者和专业人士,涵盖了多个领域,包括人工智能、大数据、云计算、区块链等。社区定期举办技术分享、培训和活动,为开发者提供更多的学习和交流机会。
更多推荐

 26
26 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)