
深入理解Transformer,兼谈MHSA(多头自注意力)、Cross-Attention(交叉注意力)、LayerNorm、FFN、位置编码
【代码】深入理解Transformer,兼谈MHSA(多头自注意力)、Cross-Attention(交叉注意力)、LayerNorm、FFN、位置编码。
一键AI生成摘要,助你高效阅读
问答
·
Attention Is All You Need——集中一下注意力
- Transformer其实不是完全的Self-Attention(SA,自注意力)结构,还带有Cross-Attention(CA,交叉注意力)、残差连接、LayerNorm、类似1维卷积的Position-wise Feed-Forward Networks(FFN)、MLP和Positional Encoding(位置编码)等
- 本文涵盖Transformer所采用的MHSA(多头自注意力)、LayerNorm、FFN、位置编码
- 对1维卷积的详解请参考深入理解TDNN(Time Delay Neural Network)——兼谈x-vector网络结构
- 对SA的Q、K、V运算的详解请参考深入理解Self-attention(自注意力机制)
Transformer的训练和推理
- 序列任务有三种:
- 序列转录:输入序列长度为N,输出序列长度为M,例如机器翻译
- 序列标注:输入序列长度为N,输出序列长度也为N,例如词性标注
- 序列总结:输入序列长度为N,输出为分类结果,例如声纹识别
- 前两个序列任务,常用Transformer进行统一建模,Transformer是一种Encoder-Decoder结构。在Transformer中:
- 推理时
- Encoder负责将输入 ( x 1 , x 2 , . . . , x n ) (x_1, x_2, ..., x_n) (x1,x2,...,xn),编码成隐藏单元(Hidden Unit) ( z 1 , z 2 , . . . , z n ) (z_1, z_2, ..., z_n) (z1,z2,...,zn),Decoder根据隐藏单元和过去时刻的输出 ( y 1 , y 2 , . . . , y t − 1 ) (y_{1}, y_{2}, ..., y_{t-1}) (y1,y2,...,yt−1), y 0 y_{0} y0为起始符号"s"或者 y 0 = 0 y_{0}=0 y0=0(很少见),解码出当前时刻的输出 y t y_{t} yt,Decoder全部的输出表示为 ( y 1 , y 2 , . . . , y m ) (y_{1}, y_{2}, ..., y_{m}) (y1,y2,...,ym)
- 由于当前时刻的输出只依赖输入和过去时刻的输出(不包含未来信息),因此这种输出的生成方式是自回归式的,也叫因果推断(Causal Inference)
- 训练时
- Encoder行为不变,Decoder根据隐藏单元和过去时刻的label
(
y
^
1
,
y
^
2
,
.
.
.
,
y
^
t
−
1
)
(\hat{y}_{1}, \hat{y}_{2}, ..., \hat{y}_{t-1})
(y^1,y^2,...,y^t−1),解码出当前时刻的输出
y
t
y_{t}
yt,由于需要对每个
y
t
y_{t}
yt计算损失,而系统必须是因果的,因此每次解码时,需要Mask掉未来的信息,也就是全部置为
−
∞
-\infty
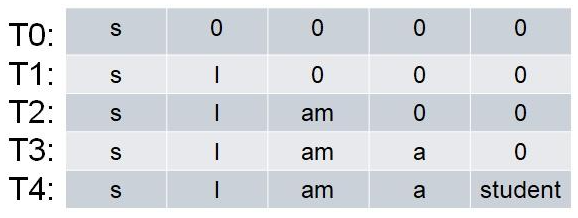
−∞(从而Softmax运算后接近0),当label为“s I am a student”,则Decoder每一时刻的输入,如下图
- 这种将label作为Decoder的输入的训练方式叫做Teacher Forcing,类似上述推理时将输出作为Decoder的输入的训练方式叫做Free Running。Teacher Forcing允许并行计算出每个时刻的输出,因此是最常用的
- Encoder行为不变,Decoder根据隐藏单元和过去时刻的label
(
y
^
1
,
y
^
2
,
.
.
.
,
y
^
t
−
1
)
(\hat{y}_{1}, \hat{y}_{2}, ..., \hat{y}_{t-1})
(y^1,y^2,...,y^t−1),解码出当前时刻的输出
y
t
y_{t}
yt,由于需要对每个
y
t
y_{t}
yt计算损失,而系统必须是因果的,因此每次解码时,需要Mask掉未来的信息,也就是全部置为
−
∞
-\infty
−∞(从而Softmax运算后接近0),当label为“s I am a student”,则Decoder每一时刻的输入,如下图
Transformer的Encoder和Decoder
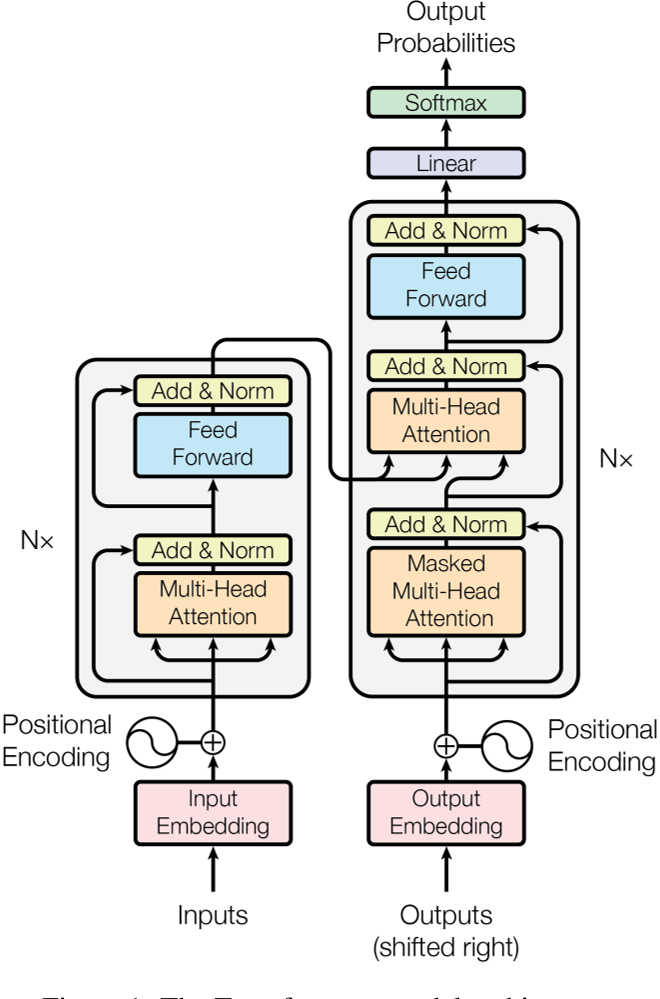
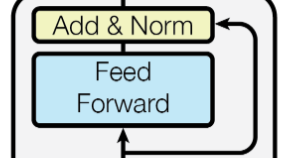
- Transformer的Encoder行为与上述一致,设Encoder的输入特征图形状为 ( n , d m o d e l ) (n, d_{model}) (n,dmodel),即长度为n的序列,序列的每个元素是 d m o d e l d_{model} dmodel维的向量,Encoder Layer(如下图左边重复N次的结构)是不改变输入特征图形状的,并且Encoder Layer内部的Sub-layer也是不改变输入特征图形状的,从而Encoder的输出特征图形状也为 ( n , d m o d e l ) (n, d_{model}) (n,dmodel)
- 这样设计的原因是:每个Encoder Layer都有两次残差连接(如下图中的Add运算),残差连接要求输入输出特征图形状不变,为了减少超参数,所以这样设计
LayerNorm
- LayerNorm(如上图中的Norm运算)常用在可变长度序列任务里,接下来通过对比BatchNorm和LayerNorm,认识LayerNorm
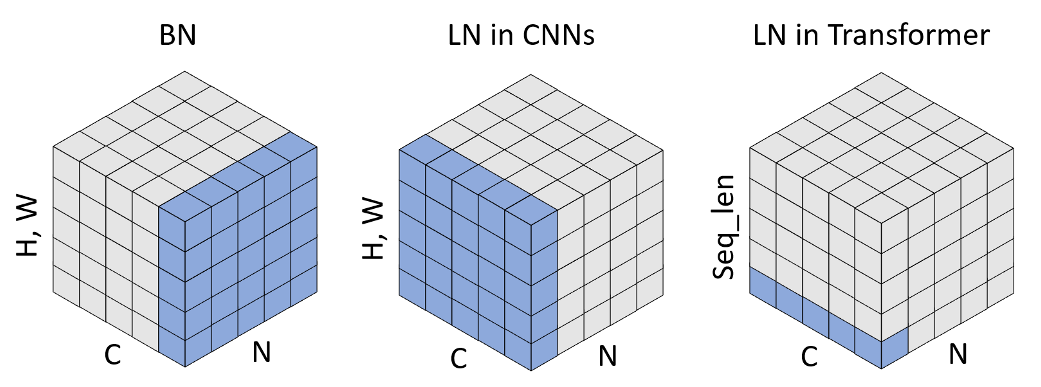
- 左图为BN,C为单个样本的特征维度(即特征图的Channels,表示特征的数量),H、W为特征的形状,因为特征可以是矩阵也可以是向量,因此统称特征形状。BN希望将每个特征变成0均值1方差,再变换成新的均值和方差,因此需要在一个Batch中,找寻每个样本的该特征,然后计算该特征的统计量,由于每个特征的统计量需要单独维护,因此构造BN需要传入特征的数量,也就是C。同时,BN的可学习参数 w e i g h t + b i a s = 2 ∗ C weight+bias=2*C weight+bias=2∗C
- 中图为LN,LN希望不依赖Batch,将单个样本的所有特征变成0均值1方差,再变换成新的均值和方差,因此需要指定样本形状,告诉LN如何计算统计量,由于样本中的每个值,都进行均值和方差的变换,因此构造LN需要传入样本的形状,也就是C、H、W。同时,LN的可学习参数 w e i g h t + b i a s = 2 ∗ C ∗ H ∗ W weight+bias=2*C*H*W weight+bias=2∗C∗H∗W
- 示例:
>>> input=torch.rand([1, 3, 2, 2])
>>> input
tensor([[[[0.1181, 0.6704],
[0.7010, 0.8031]],
[[0.0630, 0.2088],
[0.2150, 0.6469]],
[[0.5746, 0.4949],
[0.3656, 0.7391]]]])
>>> layer_norm=torch.nn.LayerNorm((3, 2, 2), eps=1e-05)
>>> output=layer_norm(input)
>>> output
tensor([[[[-1.3912, 0.8131],
[ 0.9349, 1.3424]],
[[-1.6113, -1.0293],
[-1.0047, 0.7191]],
[[ 0.4308, 0.1126],
[-0.4035, 1.0872]]]], grad_fn=<NativeLayerNormBackward0>)
>>> output[0].mean()
tensor(-1.7385e-07, grad_fn=<MeanBackward0>)
>>> output[0].std()
tensor(1.0445, grad_fn=<StdBackward0>)
>>> layer_norm.weight.shape
torch.Size([3, 2, 2])
>>> layer_norm.bias.shape
torch.Size([3, 2, 2])
# 等价于
>>> mean=input.mean(dim=(-1, -2, -3), keepdim=True)
>>> var=input.var(dim=(-1, -2, -3), keepdim=True, unbiased=False)
>>> (input-mean)/torch.sqrt(var+1e-05)
tensor([[[[-1.3912, 0.8131],
[ 0.9349, 1.3424]],
[[-1.6113, -1.0293],
[-1.0047, 0.7191]],
[[ 0.4308, 0.1126],
[-0.4035, 1.0872]]]])
- 上述两种情况为计算机视觉中的BN和LN,可以看出,BN训练时需要更新统计量,从而推理时使用统计量进行Norm,而LN训练和推理时的行为是一致的
- 在序列任务中,特征形状为1,多出来一个序列长度Seq_len,其他不变,1维的BN(BatchNorm1d)在N*Seq_len个帧中,计算每个特征的统计量,从而序列任务中的帧形状是C,因此LN要传入的帧形状是C,并且Input的形状中,C这个维度要放在最后
- 1维的BN常用于声纹识别,但是Transformer风格的模型基本都采用LN,并且LN是适用于任何特征形状的,BN则根据特征形状不同,衍生出BatchNorm1d、BatchNorm2d等
- 示例
>>> input=torch.rand([1, 200, 80])
>>> layer_norm=torch.nn.LayerNorm(80)
>>> layer_norm(input)[0][0].mean()
tensor(8.3447e-08, grad_fn=<MeanBackward0>)
>>> layer_norm(input)[0][1].mean()
tensor(-8.0466e-08, grad_fn=<MeanBackward0>)
>>> layer_norm(input)[0][0].std()
tensor(1.0063, grad_fn=<StdBackward0>)
>>> layer_norm(input)[0][1].std()
tensor(1.0063, grad_fn=<StdBackward0>)
- 在序列任务中采用LN而不是BN的原因
- 序列任务的样本很多时候是不等长的,很多时候要补0帧,当batch-size较小时,BN的统计量波动较大,而LN是对每一帧进行Norm的,不受补0帧的影响
- 训练时要构造一个Batch,因此序列长度只能固定,但是推理时序列长度是可变的,采用BN容易过拟合序列长度,LN则不容易过拟合序列长度
SA(自注意力)与CA(交叉注意力)
- 对于一个输入序列 ( seq-len , d m o d e l ) (\text{seq-len}, d_{model}) (seq-len,dmodel),SA通过Q、K、V计算矩阵,计算得到对应长度的Q、K、V序列,这些序列构成Q、K、V矩阵
- 如果Q、K、V矩阵完全由同一个序列计算而来,则称为自注意力SA;如果V、K矩阵由同一个序列计算而来,Q矩阵由另一个序列计算而来,则称为交叉注意力CA
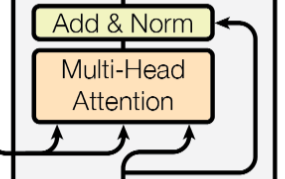
- 需要注意,Decoder Layer中的第二个MHSA(如下图),从左到右的输入,计算顺序是V、K、Q,其中V、K是根据输入的隐藏单元进行计算的,即
(
z
1
,
z
2
,
.
.
.
,
z
n
)
(z_1, z_2, ..., z_n)
(z1,z2,...,zn),得到的V、K矩阵形状分别为
(
n
,
d
k
)
(n, d_k)
(n,dk)、
(
n
,
d
v
)
(n, d_v)
(n,dv),而Q是根据输出的隐藏单元进行计算的,即
(
z
^
1
,
z
^
2
,
.
.
.
,
z
^
m
)
(\hat{z}_1, \hat{z}_2, ..., \hat{z}_m)
(z^1,z^2,...,z^m),得到的Q矩阵形状为
(
m
,
d
k
)
(m, d_k)
(m,dk),因此这是一种CA运算
- SA和CA的后续运算是一致的,V、K、Q矩阵通过Attention函数计算Attention分数,然后对V矩阵进行加权求和,得到Attention的输出。Transformer用的Attention函数是Scaled Dot-Product Attention,公式如下:
Attention ( Q , K , V ) = softmax ( Q K T d k ) V \text{Attention}(Q, K, V)=\text{softmax}(\frac{QK^T}{\sqrt{d_k}})V Attention(Q,K,V)=softmax(dkQKT)V - 如果是Decoder的Attention函数则需要Mask掉softmax的输出,使得未来时刻对应的V接近0,如下图:
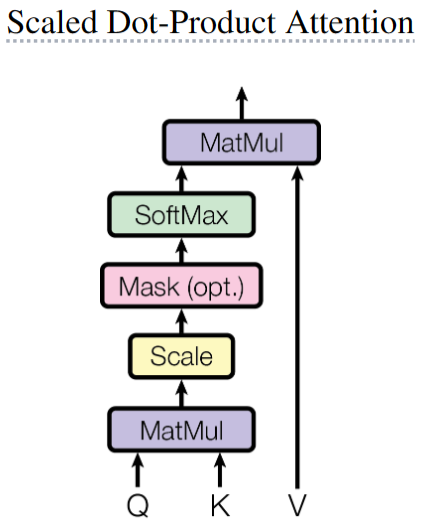
- 计算的细化过程如下图:

- Q K T QK^T QKT内积的含义是计算相似度,因此中间 ( m , n ) (m, n) (m,n)矩阵的第m行,表示第m个query对所有key的相似度
- 之后除以 d k \sqrt{d_k} dk进行Scale,并且Mask(具体操作为将未来时刻对应的点积结果置为 − ∞ -\infty −∞,从而Softmax运算后接近0),然后对 ( m , n ) (m, n) (m,n)矩阵的每一行进行Softmax
- 最后output矩阵的第m行,表示第m个权重对不同帧的value进行加权求和
- 需要注意的是
- Attention最后的输出,序列长度由Q决定,向量维度由V决定
- Q和K的向量维度一致,序列长度可以不同;K和V的序列长度一致,向量维度可以不同
- Softmax是在计算第m个query对不同key的相似度的权重,求和为1
- 除以 d k \sqrt{d_k} dk的原因是因为后面需要进行Softmax运算,具有最大值主导效果。当 d k d_k dk较小时,点积的结果差异不大,当 d k d_k dk较大时,点积的结果波动较大(假设每个query和key都是0均值1方差的多维随机变量,则它们的点积 q ⋅ k = ∑ i = 1 d k q i k i q \cdot k=\sum_{i=1}^{d_k} q_ik_i q⋅k=∑i=1dkqiki,为0均值 d k d_k dk方差的多维随机变量),从而Softmax后,大量值接近0,这样会导致梯度变得很小,不利于收敛。因此除以一个值,会使得这些点积结果的值变小,从而Softmax运算的最大值主导效果不明显
MHSA
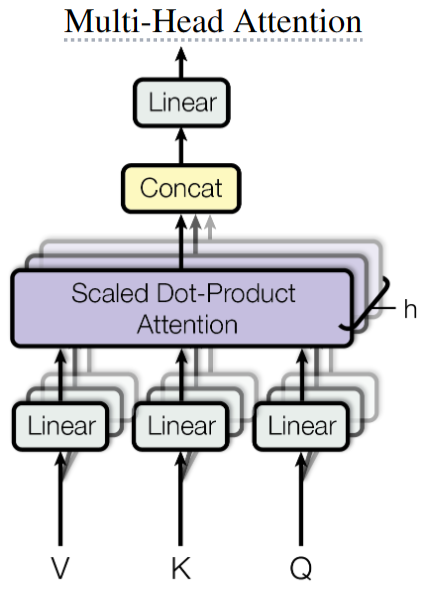
- 多头注意力的动机是:与其将输入投影到较高的维度,计算单个注意力,不如将输入投影到h个较低的维度,计算h个注意力,然后将h个注意力的输出在特征维度Concat起来,最后利用MLP进行多头特征聚合,得到MHSA的输出。MHSA的公式如下:
MultiHead ( Q , K , V ) = Concat ( h e a d 1 , h e a d 2 , . . . , h e a d h ) W O h e a d i = Attention ( Q i , K i , V i ) \begin{aligned} \text{MultiHead}(Q, K, V)&=\text{Concat}(head_1, head_2, ..., head_h)W^O \\ head_i&=\text{Attention}(Q_i, K_i, V_i) \end{aligned} MultiHead(Q,K,V)headi=Concat(head1,head2,...,headh)WO=Attention(Qi,Ki,Vi) - 由于MHSA不能改变输入输出形状,所以每个SA的设计是:当 d m o d e l = 512 d_{model}=512 dmodel=512, h = 8 h=8 h=8时, d k = d v = d m o d e l / h = 64 d_k=d_v=d_{model}/h=64 dk=dv=dmodel/h=64
- 在实际运算时,可以通过一个大的矩阵运算,将输入投影到 ( n , d m o d e l ) (n, d_{model}) (n,dmodel),然后在特征维度Split成h个矩阵,Q、K、V都可如此操作
- 因此一个MHSA的参数量: 4 ∗ d m o d e l ∗ d m o d e l = 4 ∗ d m o d e l 2 4*d_{model}*d_{model}=4*d^2_{model} 4∗dmodel∗dmodel=4∗dmodel2,即Q、K、V加最后的MLP
FFN
- FFN的操作和MHSA中最后的MLP非常相似的,公式和图如下:
FFN ( x ) = m a x ( 0 , x W 1 + b 1 ) W 2 + b 2 \text{FFN}(x)=max(0,xW_1+b_1)W_2+b_2 FFN(x)=max(0,xW1+b1)W2+b2
- 采用同一个MLP,对输入特征的每一帧进行维度变换(通常是增大为4倍),然后RELU,最后再采用另一个MLP,将输入特征的每一帧恢复回原来的维度
- 因此一个FFN的参数量: d m o d e l ∗ 4 ∗ d m o d e l + 4 ∗ d m o d e l ∗ d m o d e l = 8 ∗ d m o d e l 2 d_{model}*4*d_{model}+4*d_{model}*d_{model}=8*d^2_{model} dmodel∗4∗dmodel+4∗dmodel∗dmodel=8∗dmodel2,即维度提升MLP加维度恢复MLP
- 综合,一个Encoder Layer的参数量为: 12 ∗ d m o d e l 2 12*d^2_{model} 12∗dmodel2,一个Decoder Layer的参数量为: 16 ∗ d m o d e l 2 16*d^2_{model} 16∗dmodel2
- 上述所有参数估计忽略LayerNorm的参数,因为其数量级较小
Embedding Layer和Softmax
- Encoder和Decoder的Embedding Layer,以及最后的Softmax输出前,都有一个MLP,在Transformer中,这三个MLP是共享参数的,形状都是 ( dict-len , d m o d e l ) (\text{dict-len}, d_{model}) (dict-len,dmodel), dict-len \text{dict-len} dict-len是字典大小
- 在Embedding Layer中,权重都被除以了 d m o d e l \sqrt{d_{model}} dmodel,从而Embedding的输出范围在[-1, 1]附近,这是为了让Embedding的值范围靠近Positional Encoding,从而可以直接相加
Positional Encoding(位置编码)
- Attention的输出是不具有时序信息的,如果把输入打乱,那么也只会导致对应的输出打乱而已,不会有导致值变化,但序列任务往往关注时序信息,一件事先发生和后发生,意义是不一样的,因此需要对Attention的输入添加位置编码
- 位置编码的公式如下:
PE ( p o s , 2 i ) = s i n ( p o s / 1000 0 2 i d m o d e l ) PE ( p o s , 2 i + 1 ) = c o s ( p o s / 1000 0 2 i d m o d e l ) \begin{aligned} \text{PE}(pos, 2i)=sin(pos/10000^{\frac{2i}{d_{model}}}) \\ \text{PE}(pos, 2i+1)=cos(pos/10000^{\frac{2i}{d_{model}}}) \end{aligned} PE(pos,2i)=sin(pos/10000dmodel2i)PE(pos,2i+1)=cos(pos/10000dmodel2i) - pos表示帧的位置,第二个参数表示特征的位置,奇偶交替,也就说:不同位置的同一特征,根据位置映射不同频率的正弦函数进行编码;同一位置的不同特征,根据奇偶分布映射不同频率的正弦函数进行编码
- 位置编码值的范围是[-1, 1](Embedding的权重需要除以 d m o d e l \sqrt{d_{model}} dmodel的原因),与Embedding对应元素相加,即可输入到Attention中

旨在为数千万中国开发者提供一个无缝且高效的云端环境,以支持学习、使用和贡献开源项目。
更多推荐



 28
28 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)