
【优化器】(六) AdamW原理 & pytorch代码解析
在之前的文章里,我们介绍了集成一阶动量和二阶动量的优化器Adam。AdamW其实是在Adam的基础上加入了weight decay正则化,但是我们上一篇文章里也看到了Adam的代码中已经有正则化,那么两者有什么区别呢?其实AdamW和Adam唯一的区别,就是weight decay的加入方式。在Adam当中,weight decay是直接加入到梯度当中
1.简介
在之前的文章里,我们介绍了集成一阶动量和二阶动量的优化器Adam。AdamW其实是在Adam的基础上加入了weight decay正则化,但是我们上一篇文章里也看到了Adam的代码中已经有正则化,那么两者有什么区别呢?
2.AdamW
其实AdamW和Adam唯一的区别,就是weight decay的加入方式。
在Adam当中,weight decay是直接加入到梯度当中:
其中是当前step的梯度,
是上一个step中的模型权重,
是正则化系数。
而在AdamW中,正则化变成了:
其中是学习率。
所以AdamW的思路特别简单:反正正则化系数加进梯度之后最终也要在权重上进行更新,那为什么还需要加进梯度去呢?因此,AdamW直接在权重上进行衰减,在收敛速度上也能领先于Adam。
3.思考
但仔细一想,Adam+L2正则化和AdamW虽然都可以实现权重衰减,但是两者的实施细节上其实是不一样的。L2正则化是在loss上加入权重的惩罚系数,也可以说是在梯度上进行修改,而AdamW其实是更字面意思的weight decay,就是直接让权重衰减。
这两者其实在SGD上是对等的:
只不过在Adam这种要考虑一阶和二阶动量时,以上方程已不满足线性关系,所以最终的结果是有区别的。那么AdamW相对于Adam而言,除了收敛速度更快之外,它的正则系数也不再受动量的影响(一般会被除以二阶动量而稀释),因此拥有超参独立和正则力度增加的优点,这也是原论文名字中带有decouple的原因。
4.pytorch代码
AdamW的伪代码流程如下:
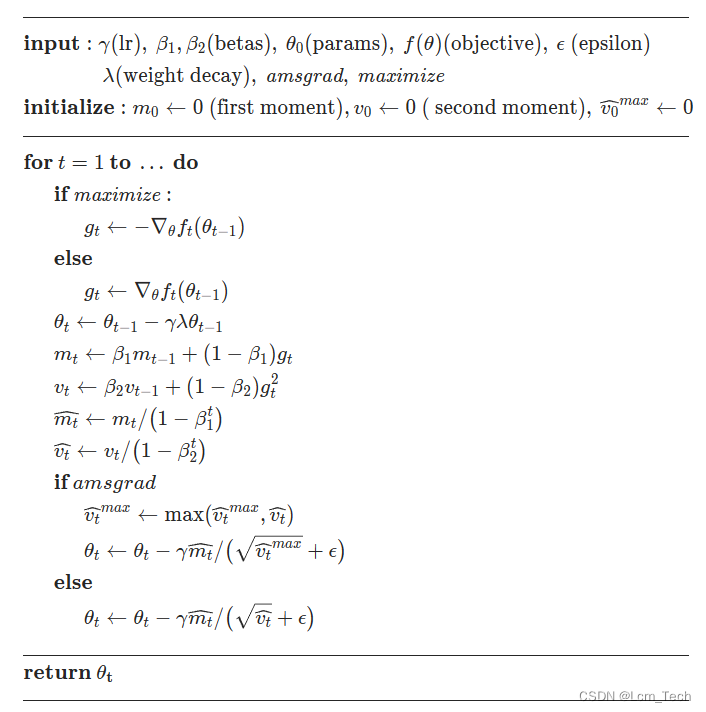
以下代码为pytorch官方Adam的代码。
def _single_tensor_adamw(
params: List[Tensor],
grads: List[Tensor],
exp_avgs: List[Tensor],
exp_avg_sqs: List[Tensor],
max_exp_avg_sqs: List[Tensor],
state_steps: List[Tensor],
grad_scale: Optional[Tensor],
found_inf: Optional[Tensor],
*,
amsgrad: bool,
beta1: float,
beta2: float,
lr: float,
weight_decay: float,
eps: float,
maximize: bool,
capturable: bool,
differentiable: bool,
):
assert grad_scale is None and found_inf is None
for i, param in enumerate(params):
grad = grads[i] if not maximize else -grads[i]
exp_avg = exp_avgs[i]
exp_avg_sq = exp_avg_sqs[i]
step_t = state_steps[i]
if capturable:
assert (
param.is_cuda and step_t.is_cuda
), "If capturable=True, params and state_steps must be CUDA tensors."
if torch.is_complex(param):
grad = torch.view_as_real(grad)
exp_avg = torch.view_as_real(exp_avg)
exp_avg_sq = torch.view_as_real(exp_avg_sq)
param = torch.view_as_real(param)
# update step
step_t += 1
# Perform stepweight decay
param.mul_(1 - lr * weight_decay)
# Decay the first and second moment running average coefficient
exp_avg.mul_(beta1).add_(grad, alpha=1 - beta1)
exp_avg_sq.mul_(beta2).addcmul_(grad, grad, value=1 - beta2)
if capturable or differentiable:
step = step_t
# 1 - beta1 ** step can't be captured in a CUDA graph, even if step is a CUDA tensor
# (incurs "RuntimeError: CUDA error: operation not permitted when stream is capturing")
bias_correction1 = 1 - torch.pow(beta1, step)
bias_correction2 = 1 - torch.pow(beta2, step)
step_size = lr / bias_correction1
step_size_neg = step_size.neg()
bias_correction2_sqrt = bias_correction2.sqrt()
if amsgrad:
# Maintains the maximum of all 2nd moment running avg. till now
if differentiable:
max_exp_avg_sqs_i = max_exp_avg_sqs[i].clone()
else:
max_exp_avg_sqs_i = max_exp_avg_sqs[i]
max_exp_avg_sqs[i].copy_(torch.maximum(max_exp_avg_sqs_i, exp_avg_sq))
# Uses the max. for normalizing running avg. of gradient
# Folds in (admittedly ugly) 1-elem step_size math here to avoid extra param-set-sized read+write
# (can't fold it into addcdiv_ below because addcdiv_ requires value is a Number, not a Tensor)
denom = (
max_exp_avg_sqs[i].sqrt() / (bias_correction2_sqrt * step_size_neg)
).add_(eps / step_size_neg)
else:
denom = (
exp_avg_sq.sqrt() / (bias_correction2_sqrt * step_size_neg)
).add_(eps / step_size_neg)
param.addcdiv_(exp_avg, denom)
else:
step = _get_value(step_t)
bias_correction1 = 1 - beta1 ** step
bias_correction2 = 1 - beta2 ** step
step_size = lr / bias_correction1
bias_correction2_sqrt = _dispatch_sqrt(bias_correction2)
if amsgrad:
# Maintains the maximum of all 2nd moment running avg. till now
torch.maximum(max_exp_avg_sqs[i], exp_avg_sq, out=max_exp_avg_sqs[i])
# Use the max. for normalizing running avg. of gradient
denom = (max_exp_avg_sqs[i].sqrt() / bias_correction2_sqrt).add_(eps)
else:
denom = (exp_avg_sq.sqrt() / bias_correction2_sqrt).add_(eps)
param.addcdiv_(exp_avg, denom, value=-step_size)业务合作/学习交流+v:lizhiTechnology
如果想要了解更多优化器相关知识,可以参考我的专栏和其他相关文章:
【优化器】(一) SGD原理 & pytorch代码解析_sgd优化器-CSDN博客
【优化器】(二) AdaGrad原理 & pytorch代码解析_adagrad优化器-CSDN博客
【优化器】(三) RMSProp原理 & pytorch代码解析_rmsprop优化器-CSDN博客
【优化器】(四) AdaDelta原理 & pytorch代码解析_adadelta里rho越大越敏感-CSDN博客
【优化器】(五) Adam原理 & pytorch代码解析_adam优化器-CSDN博客
【优化器】(六) AdamW原理 & pytorch代码解析-CSDN博客
【优化器】(七) 优化器统一框架 & 总结分析_mosec优化器优点-CSDN博客
如果想要了解更多深度学习相关知识,可以参考我的其他文章:

旨在为数千万中国开发者提供一个无缝且高效的云端环境,以支持学习、使用和贡献开源项目。
更多推荐


 4
4 0
0- 0



 已为社区贡献8条内容
已为社区贡献8条内容

所有评论(0)