STK中传感器(Sensor)约束条件(Constraints)的基础设置(Basic)设置(一)
对对象的访问受约束所应用的对象的最小和最大高度的约束。在车辆静止的情况下,方位角是从地心坐标系中的局部北方测量的。对于facilities和target,方位角是在与中心体表面相切的局部水平面上测量的,从当地的北方向东方测量的,正北对应的是0°,正南对应的是180°。对于其他对象,方位角是垂直于最低点的平面上测量的,从惯性速度矢量的投影到相对位置矢量的投影。角速率是一个对象的旋转速率,它是保持该对
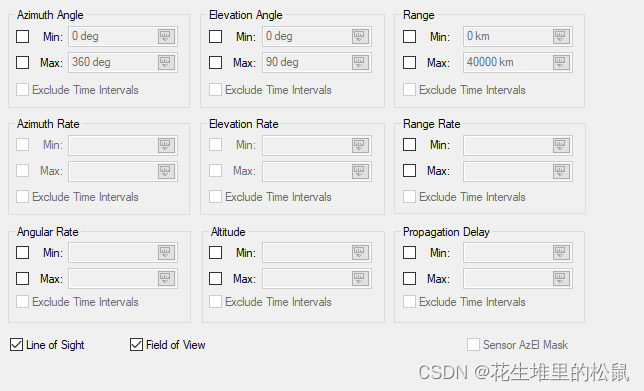
传感器基础约束设置包括
1.Azimuth Angle(方位角)
对于facilities和target,方位角是在与中心体表面相切的局部水平面上测量的,从当地的北方向东方测量的,正北对应的是0°,正南对应的是180°。
对于ships、ground vehicles 和 aircraft,方位角是根据地球固定速度矢量的投影来测量的。在车辆静止的情况下,方位角是从地心坐标系中的局部北方测量的。
对于其他对象,方位角是垂直于最低点的平面上测量的,从惯性速度矢量的投影到相对位置矢量的投影。方向根据右手定则判断,对象正前方为0°,正后方为180°。
2.Azimuth Rate(方位角率)
方位角率是方位角的变化率。
3.Angular Rate (角速率)
角速率是一个对象的旋转速率,它是保持该对象的身体固定坐标系中的一个固定向量与两个对象之间的视线对齐所必需的。
4.Elevation Angle (仰角)
对于facilities和target以外的对象,仰角测量为最低点矢量和相对位置矢量之间的角度减去 90 度。 对于垂直于最低点的平面上方的对象,仰角为正。
对于facilities和target,高程测量为局部水平面上方与中心体表面相切的角度。 对于局部水平面以上的物体,仰角为正。
a.应用于卫星的仰角约束如下图所示:

b. 应用于facilities和target的仰角约束如下图所示:

5.Elevation Rate(仰角率)
仰角率是仰角的变化率。
6.Altitude(高度)
对对象的访问受约束所应用的对象的最小和最大高度的约束。在船舶或地面车辆具有接近或等于最小高度限制的恒定高度的情况下,数字噪声可能决定访问时间并且不会产生访问。 在这些情况下,建议将最小高度值设置为刚好在所需约束之下,例如 对于 50m 的所需最小约束,将最小高度设置为 49.99m,以便对象在确切的所需最小约束高度时显示访问。
7.Range(范围)
范围测量为两个对象之间的距离。
8.Range Rate (范围率)
距离率是沿两个物体视线的相对速度的分量
9.Propagation Delay (传播延迟)
对对象的访问受到信号在两个对象之间传播的最短和最长时间的限制。

腾讯云面向开发者汇聚海量精品云计算使用和开发经验,营造开放的云计算技术生态圈。
更多推荐

 6
6 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)