
写文章




- @weixin_45641470
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
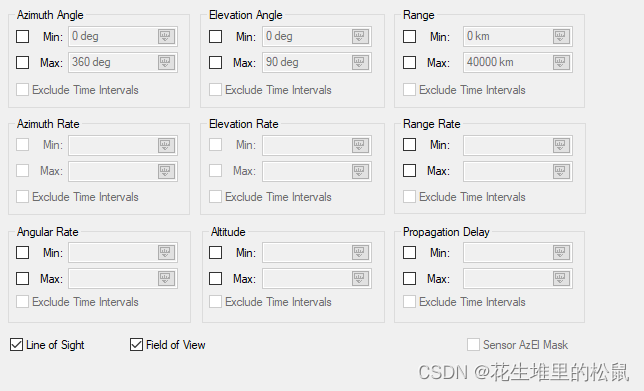
STK中传感器(Sensor)约束条件(Constraints)的基础设置(Basic)设置(一)
对对象的访问受约束所应用的对象的最小和最大高度的约束。在车辆静止的情况下,方位角是从地心坐标系中的局部北方测量的。对于facilities和target,方位角是在与中心体表面相切的局部水平面上测量的,从当地的北方向东方测量的,正北对应的是0°,正南对应的是180°。对于其他对象,方位角是垂直于最低点的平面上测量的,从惯性速度矢量的投影到相对位置矢量的投影。角速率是一个对象的旋转速率,它是保持该对
Walker星座构型(N/P/F)
Walker星座指的是具有相同轨道高度和轨道倾角的多颗圆轨道卫星,以地球为球心均匀分布的卫星星座。Walker星座构型常用的描述方式为(N/P/F,h,i)。N为星座中卫星的总数量,P为星座的轨道面数,i为星座中卫星的轨道倾角,h为星座中卫星的轨道高度,F为相位因子,是0~(P-1)之间的一个整数,代表的含义为Walker星座中相邻两个轨道面对应卫星之间的相位关系。相位因子用来确定相邻两个轨道平面
到底了