ROS2——TF坐标系(十五)
坐标系是我们非常熟悉的一个概念,也是机器人学中的重要基础,在一个完整的机器人系统中,会存在很多坐标系,这些坐标系之间的位置关系该如何管理?ROS给我们提供了一个坐标系的管理神器——TF。比如在机械臂形态的机器人中,机器人安装的位置叫做基坐标系Base Frame,机器人安装位置在外部环境下的参考系叫做世界坐标系World Frame,机器人末端夹爪的位置叫做工具坐标系,外部被操作物体的位置叫做工件
ROS2机器人操作系统
前言
坐标系是我们非常熟悉的一个概念,也是机器人学中的重要基础,在一个完整的机器人系统中,会存在很多坐标系,这些坐标系之间的位置关系该如何管理?
ROS给我们提供了一个坐标系的管理神器——TF。
一、机器人中的坐标系
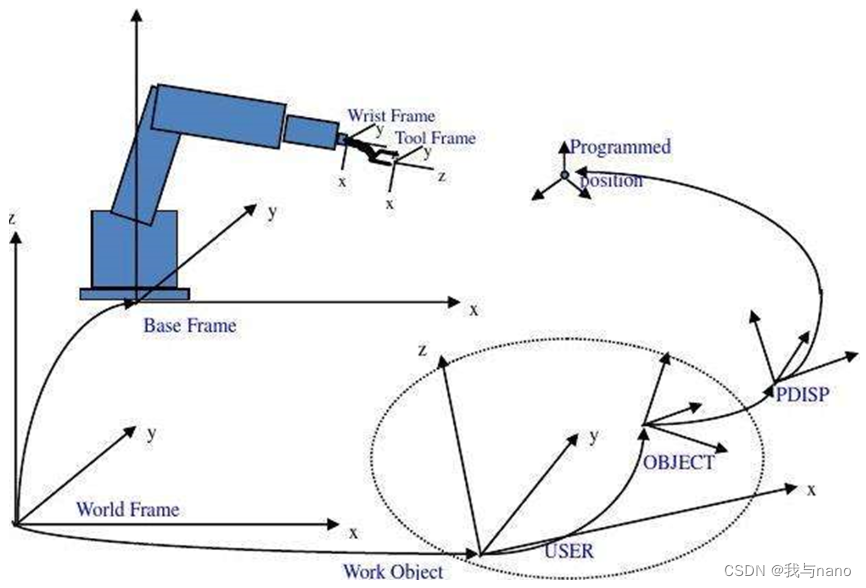
比如在机械臂形态的机器人中,机器人安装的位置叫做基坐标系Base Frame,机器人安装位置在外部环境下的参考系叫做世界坐标系World Frame,机器人末端夹爪的位置叫做工具坐标系,外部被操作物体的位置叫做工件坐标系,在机械臂抓取外部物体的过程中,这些坐标系之间的关系也在跟随变化。
二、TF命令行操作
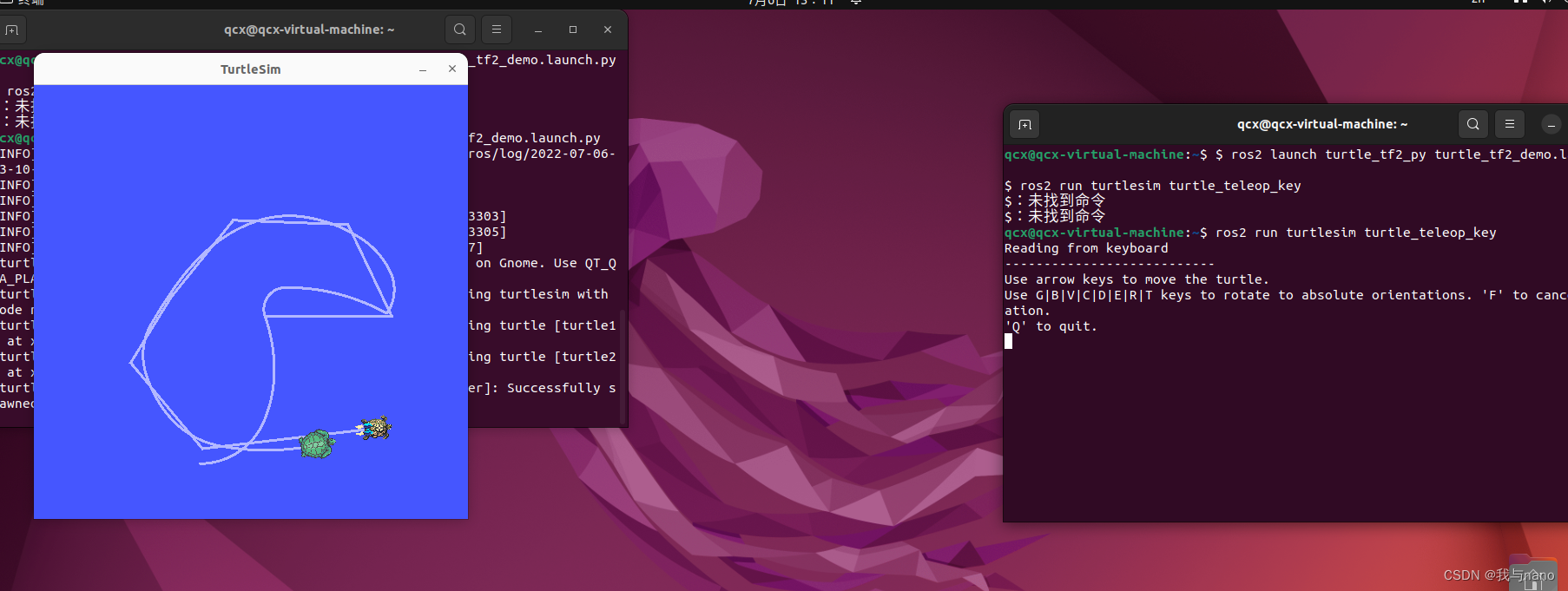
1.小海龟跟随例程
这个示例需要我们先安装相应的功能包,然后就可以通过一个launch文件启动,之后我们可以控制其中的一只小海龟,另外一只小海龟会自动跟随运动。
安装相应的功能包
$ sudo apt install ros-humble-turtle-tf2-py ros-humble-tf2-tools
$ sudo pip3 install transforms3d
$ ros2 launch turtle_tf2_py turtle_tf2_demo.launch.py
$ ros2 run turtlesim turtle_teleop_key
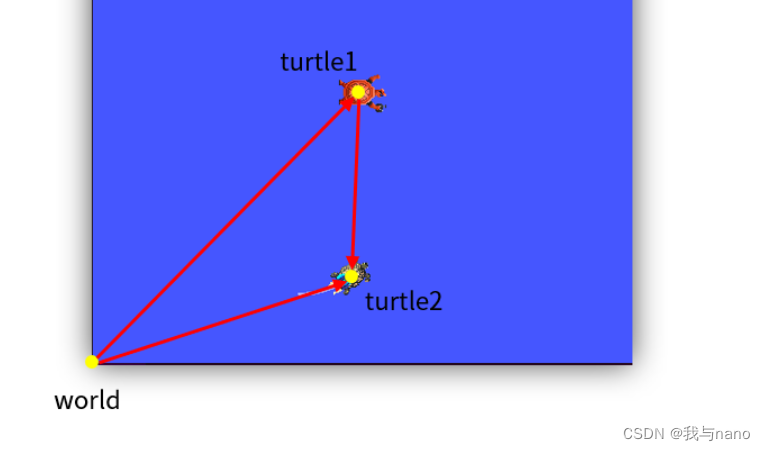
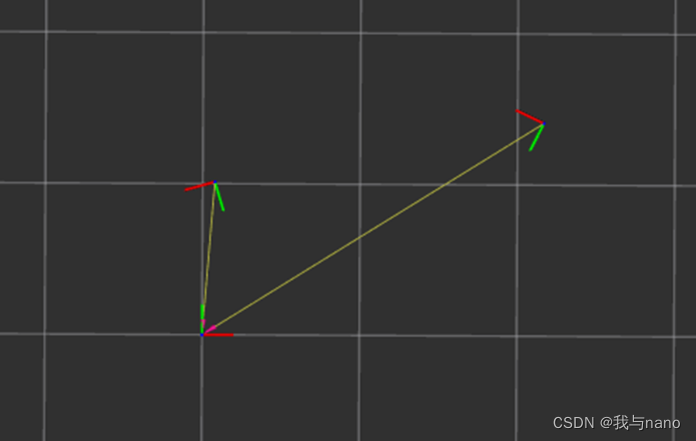
在两只海龟的仿真器中,我们可以定义三个坐标系,比如仿真器的全局参考系叫做world,turtle1和turtle2坐标系在两只海龟的中心点,这样,turtle1和world坐标系的相对位置,就可以表示海龟1的位置,海龟2也同理。
要实现海龟2向海龟1运动,我们在两者中间做一个连线,再加一个箭头,怎么样,是不是有想起高中时学习的向量计算?我们说坐标变换的描述方法就是向量,所以在这个跟随例程中,用TF就可以很好的解决。
向量的长度表示距离,方向表示角度,有了距离和角度,我们随便设置一个时间,不就可以计算得到速度了么,然后就是速度话题的封装和发布,海龟2也就可以动起来了。
所以这个例程的核心就是通过坐标系实现向量的计算,两只海龟还会不断运动,这个向量也得按照某一个周期计算,这就得用上TF的动态广播与监听了。
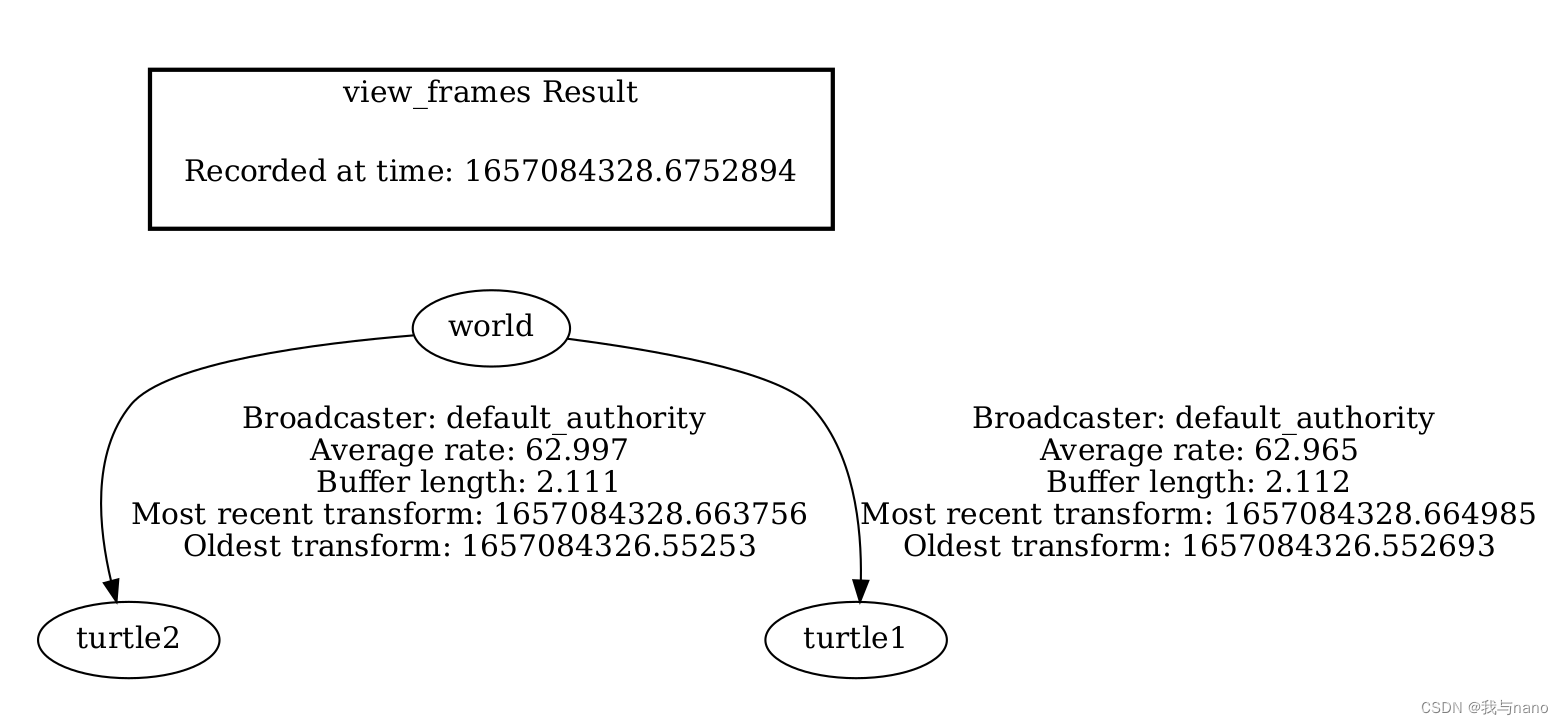
查看TF树
在当前运行的两只海龟中,有哪些坐标系呢,我们可以通过这个小工具来做查看。
$ ros2 run tf2_tools view_frames
默认在当前终端路径下生成了一个frames.pdf文件,打开之后,就可以看到系统中各个坐标系的关系了。
查询坐标变换信息
只看到坐标系的结构还不行,如果我们想要知道某两个坐标系之间的具体关系,可以通过tf2_echo这个工具查看:
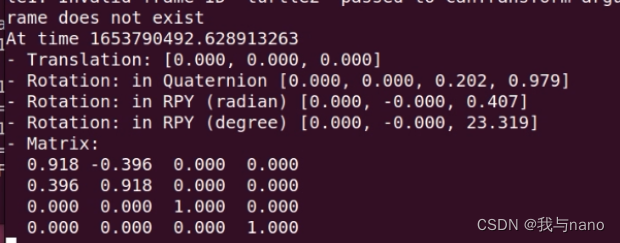
$ ros2 run tf2_ros tf2_echo turtle2 turtle1
运行成功后,终端中就会循环打印坐标系的变换数值了,由平移和旋转两个部分组成,还有旋转矩阵。
坐标系可视化
$ ros2 run rviz2 rviz2 -d $(ros2 pkg prefix --share turtle_tf2_py)/rviz/turtle_rviz.rviz
再让小海龟动起来,Rviz中的坐标轴就会开始运动
2.静态TF广播
坐标变换中最为简单的应该是相对位置不发生变化的情况,比如你家的房子在哪个位置,只要房子不拆,这个坐标应该就不会变化。
在机器人系统中也很常见,比如激光雷达和机器人底盘之间的位置关系,安装好之后基本不会变化。
在TF中,这种情况也称之为静态TF变换
$ ros2 run learning_tf static_tf_broadcaster
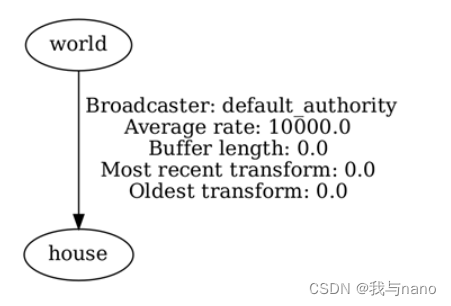
$ ros2 run tf2_tools view_frames
可以看到当前系统中存在两个坐标系,一个是world,一个是house,两者之间的相对位置不会发生改变,通过一个静态的TF对象进行维护。
import rclpy # ROS2 Python接口库
from rclpy.node import Node # ROS2 节点类
from geometry_msgs.msg import TransformStamped # 坐标变换消息
import tf_transformations # TF坐标变换库
from tf2_ros.static_transform_broadcaster import StaticTransformBroadcaster # TF静态坐标系广播器类
class StaticTFBroadcaster(Node):
def __init__(self, name):
super().__init__(name) # ROS2节点父类初始化
self.tf_broadcaster = StaticTransformBroadcaster(self) # 创建一个TF广播器对象
static_transformStamped = TransformStamped() # 创建一个坐标变换的消息对象
static_transformStamped.header.stamp = self.get_clock().now().to_msg() # 设置坐标变换消息的时间戳
static_transformStamped.header.frame_id = 'world' # 设置一个坐标变换的源坐标系
static_transformStamped.child_frame_id = 'house' # 设置一个坐标变换的目标坐标系
static_transformStamped.transform.translation.x = 10.0 # 设置坐标变换中的X、Y、Z向的平移
static_transformStamped.transform.translation.y = 5.0
static_transformStamped.transform.translation.z = 0.0
quat = tf_transformations.quaternion_from_euler(0.0, 0.0, 0.0) # 将欧拉角转换为四元数(roll, pitch, yaw)
static_transformStamped.transform.rotation.x = quat[0] # 设置坐标变换中的X、Y、Z向的旋转(四元数)
static_transformStamped.transform.rotation.y = quat[1]
static_transformStamped.transform.rotation.z = quat[2]
static_transformStamped.transform.rotation.w = quat[3]
self.tf_broadcaster.sendTransform(static_transformStamped) # 广播静态坐标变换,广播后两个坐标系的位置关系保持不变
def main(args=None):
rclpy.init(args=args) # ROS2 Python接口初始化
node = StaticTFBroadcaster("static_tf_broadcaster") # 创建ROS2节点对象并进行初始化
rclpy.spin(node) # 循环等待ROS2退出
node.destroy_node() # 销毁节点对象
rclpy.shutdown()
3.TF监听
$ ros2 run learning_tf tf_listener

import rclpy # ROS2 Python接口库
from rclpy.node import Node # ROS2 节点类
import tf_transformations # TF坐标变换库
from tf2_ros import TransformException # TF左边变换的异常类
from tf2_ros.buffer import Buffer # 存储坐标变换信息的缓冲类
from tf2_ros.transform_listener import TransformListener # 监听坐标变换的监听器类
class TFListener(Node):
def __init__(self, name):
super().__init__(name) # ROS2节点父类初始化
self.declare_parameter('source_frame', 'world') # 创建一个源坐标系名的参数
self.source_frame = self.get_parameter( # 优先使用外部设置的参数值,否则用默认值
'source_frame').get_parameter_value().string_value
self.declare_parameter('target_frame', 'house') # 创建一个目标坐标系名的参数
self.target_frame = self.get_parameter( # 优先使用外部设置的参数值,否则用默认值
'target_frame').get_parameter_value().string_value
self.tf_buffer = Buffer() # 创建保存坐标变换信息的缓冲区
self.tf_listener = TransformListener(self.tf_buffer, self) # 创建坐标变换的监听器
self.timer = self.create_timer(1.0, self.on_timer) # 创建一个固定周期的定时器,处理坐标信息
def on_timer(self):
try:
now = rclpy.time.Time() # 获取ROS系统的当前时间
trans = self.tf_buffer.lookup_transform( # 监听当前时刻源坐标系到目标坐标系的坐标变换
self.target_frame,
self.source_frame,
now)
except TransformException as ex: # 如果坐标变换获取失败,进入异常报告
self.get_logger().info(
f'Could not transform {self.target_frame} to {self.source_frame}: {ex}')
return
pos = trans.transform.translation # 获取位置信息
quat = trans.transform.rotation # 获取姿态信息(四元数)
euler = tf_transformations.euler_from_quaternion([quat.x, quat.y, quat.z, quat.w])
self.get_logger().info('Get %s --> %s transform: [%f, %f, %f] [%f, %f, %f]'
% (self.source_frame, self.target_frame, pos.x, pos.y, pos.z, euler[0], euler[1], euler[2]))
def main(args=None):
rclpy.init(args=args) # ROS2 Python接口初始化
node = TFListener("tf_listener") # 创建ROS2节点对象并进行初始化
rclpy.spin(node) # 循环等待ROS2退出
node.destroy_node() # 销毁节点对象
rclpy.shutdown() # 关闭ROS2 Python接口
总结
小海龟跟随的详细代码可以去古月的图文教程里看

CSDN联合极客时间,共同打造面向开发者的精品内容学习社区,助力成长!
更多推荐



 4
4 0
0- 0



 已为社区贡献11条内容
已为社区贡献11条内容

所有评论(0)