数字图像处理入门(c++实现,参考北交视频)
目录直方图计算直方图均衡均值/高斯 低通滤波中值滤波数学形态学处理腐蚀膨胀开运算闭运算总结我是看着这个学习的,在此推荐一下:北交图像处理与机器学习在此记录一下自己的学习过程直方图计算灰度直方图反映了图像灰度的分布(统计)特征计算公式:h(rk)=nkh(r_{k})=n_{k}h(rk)=nkrk为灰度级,n为该灰度级的像素个数r_{k}为灰度级,n为该灰度级的像素个数rk为灰度级,n为该灰
目录
我是看着这个学习的,在此推荐一下:
在此记录一下自己的学习过程
1.项目代码
图像处理与机器学习课件和代码地址:传送门
含完整代码的项目可在github下载:
https://github.com/chenshunpeng/Impro_MLearning
ps.
- 项目第一次运行可能会卡,第二次就好了
- 如果项目需要加载.dll的符号,直接取消即可(即禁用后序符号加载)
2.第一章 基本概念
2.1.直方图(code)
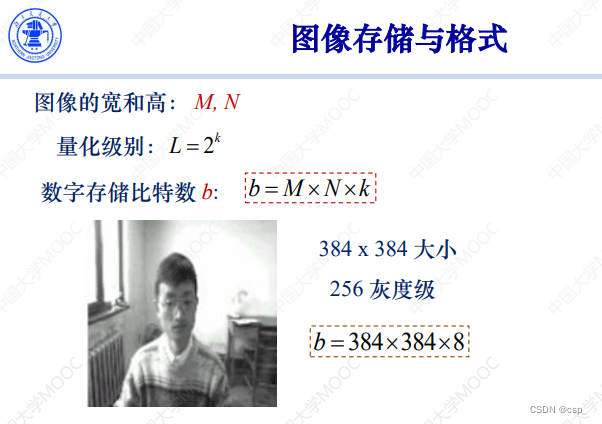
数字图像:以空间位置 ( x , y ) (x,y) (x,y) 为自变量的二维函数 f ( x , y ) f(x,y) f(x,y)
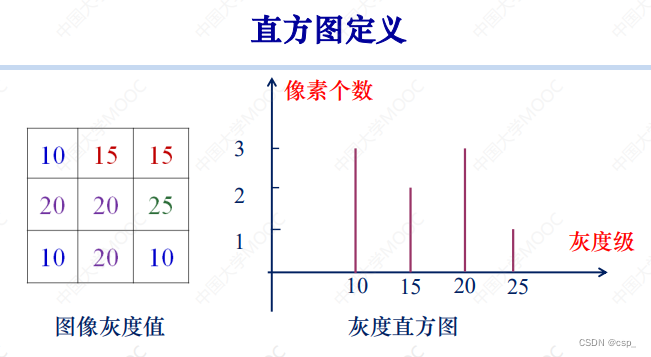
直方图定义:
- 不同灰度级分布构成不同图像
- 统计灰度级出现的次数(概率)
- 直方图表征了图像中灰度级分布特性
灰度直方图反映了图像灰度的分布(统计)特征
- 灰度级的函数
- 具有该灰度级的像素个数
计算公式:
h
(
r
k
)
=
n
k
h(r_{k})=n_{k}
h(rk)=nk
r
k
为灰度级
,
n
为该灰度级的像素个数
r_{k}为灰度级,n为该灰度级的像素个数
rk为灰度级,n为该灰度级的像素个数
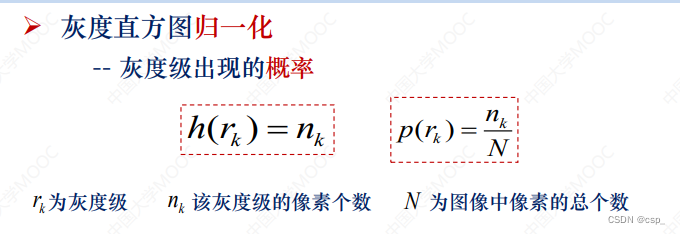
且有灰度直方图累加: ∑ k = 0 L − 1 h ( r k ) = ∑ k = 0 L − 1 n k = N ( 图像中像素的总个数 ) \sum ^{L-1}_{k=0}h\left( r_{k}\right) =\sum ^{L-1}_{k=0}n_{k}=N\left( 图像中像素的总个数\right) k=0∑L−1h(rk)=k=0∑L−1nk=N(图像中像素的总个数)
之后我们来写这部分的代码:
首先有初始化:
// 计算图像直方图
int histFlag;
int hist[256]; //存储图像直方图,256灰度级
void histCompute(BYTE*, int, int);//计算图像直方图函数
添加好事件处理函数,调用求取直方图函数,更新窗口,显示直方图
//计算图像直方图
void CMFCApplication1View::HistCompute(){
// TODO: 完成histCompute函数设计
//求取直方图的函数
histCompute(image, width, height);
histFlag = 1;
//更新窗口,显示直方图的部分
OnInitialUpdate();
CRect ClientRect;
GetClientRect(&ClientRect);
InvalidateRect(&ClientRect);
}
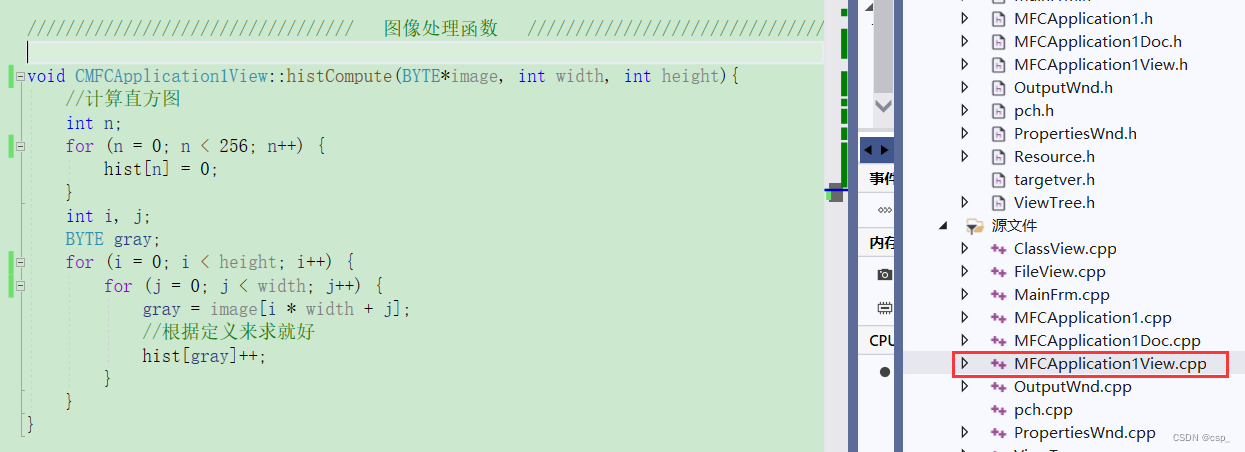
计算直方图部分:
void CMFCApplication1View::histCompute(BYTE*image, int width, int height){
//计算直方图
int n;
for (n = 0; n < 256; n++) {
hist[n] = 0;
}
int i, j;
BYTE gray;
for (i = 0; i < height; i++) {
for (j = 0; j < width; j++) {
gray = image[i * width + j];
//根据定义来求就好
hist[gray]++;
}
}
}
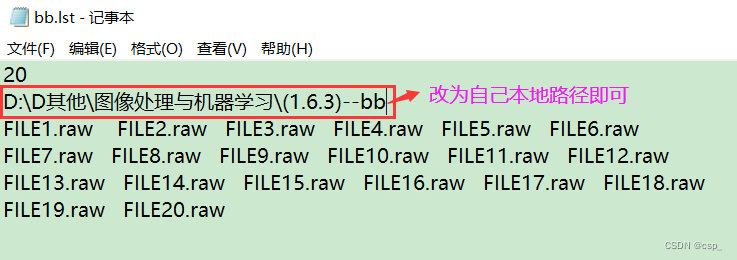
如果想方便切换图片,可以修改路径,之后用键盘右上角的page down和page up键即可实现切换图片(当然也可以不改,用鼠标切换也很方便):
最后成功显示出结果:

核心代码位置:
3.第二章 图像增强
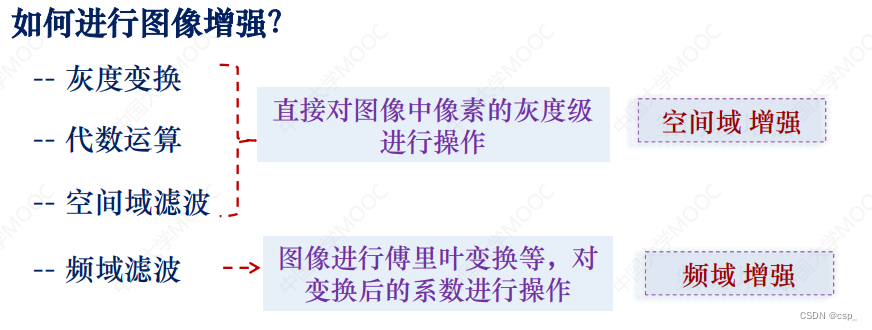
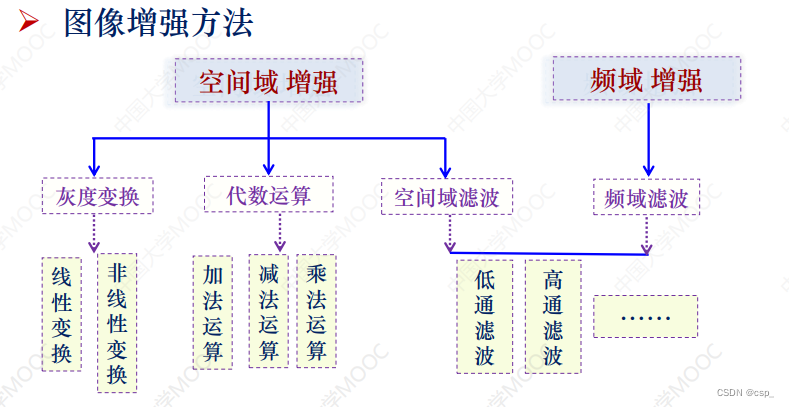
首先进行灰度变换:
D
B
=
f
(
D
A
)
D_{B}=f(D_{A})
DB=f(DA)
H
A
(
D
A
)
H_{A}\left( D_{A}\right)
HA(DA):变换之前图像的直方图
H
B
(
D
B
)
H_{B}\left( D_{B}\right)
HB(DB):变换之后图像的直方图
有如下结论:
H
B
(
D
B
)
=
H
A
(
D
A
)
f
′
(
D
A
)
H_{B}\left( D_{B}\right)=\dfrac{H_{A}\left( D_{A}\right)}{f'\left( D_{A}\right) }
HB(DB)=f′(DA)HA(DA)
即灰度变换后图像直方图是变换前直方图与变换函数导数之比
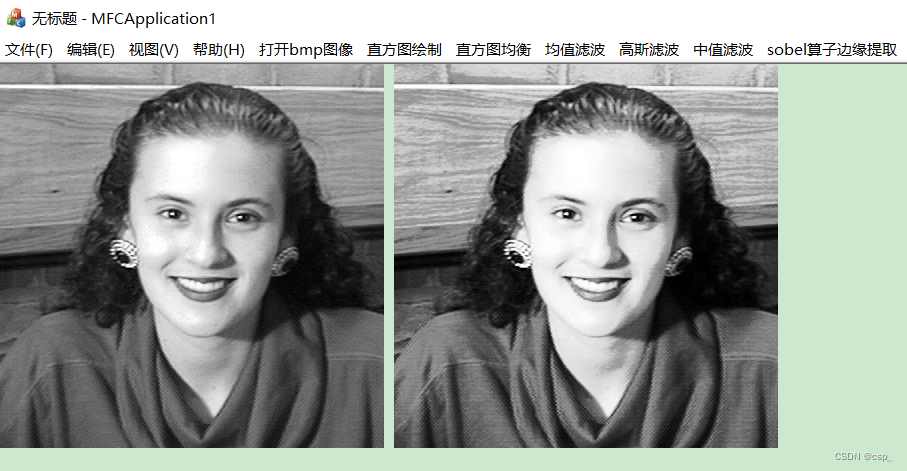
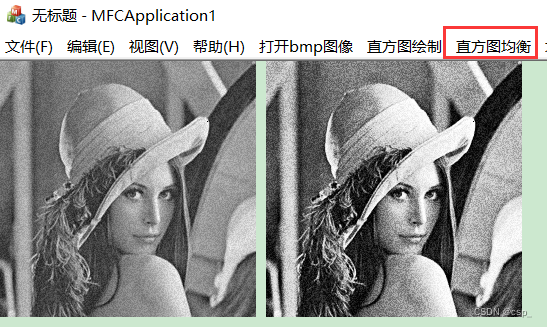
3.1.直方图均衡(code)
- 直方图均衡化处理之后,原来比较少像素的灰度会被分配到别的灰度去,像素相对集中, 处理后灰度范围变大,对比度变大,清晰度变大,所以能有效增强图像
- 这种方法通常用来增加许多图像的局部对比度,尤其是当图像的有用数据的对比度相当接近的时候,通过这种方法,亮度可以更好地在直方图上分布
- 可以用于增强局部的对比度而不影响整体的对比度,直方图均衡化通过有效地扩展常用的亮度来实现这种功能
改变后使每个灰度级拥有相同的像素个数,即出现
H
B
(
D
B
)
=
H
A
(
D
A
)
f
′
(
D
A
)
=
常数
=
A
0
D
m
H_{B}\left( D_{B}\right)=\dfrac{H_{A}\left( D_{A}\right)}{f'\left( D_{A}\right) }=常数=\dfrac{A_{0}}{D_{m}}
HB(DB)=f′(DA)HA(DA)=常数=DmA0
其中, D m D_{m} Dm代表灰度级, A 0 A_{0} A0 代表 D m D_{m} Dm这个灰度级上的 图像像素总数
通过积分最终得到:
D
B
=
D
m
A
0
⋅
∑
0
D
A
H
A
(
D
A
)
D_{B}=\dfrac{D_{m}}{A_{0}}\cdot \sum ^{D_{A}}_{0}H_{A}\left( D_{A}\right)
DB=A0Dm⋅0∑DAHA(DA)
这种技术可应用于人脸识别中
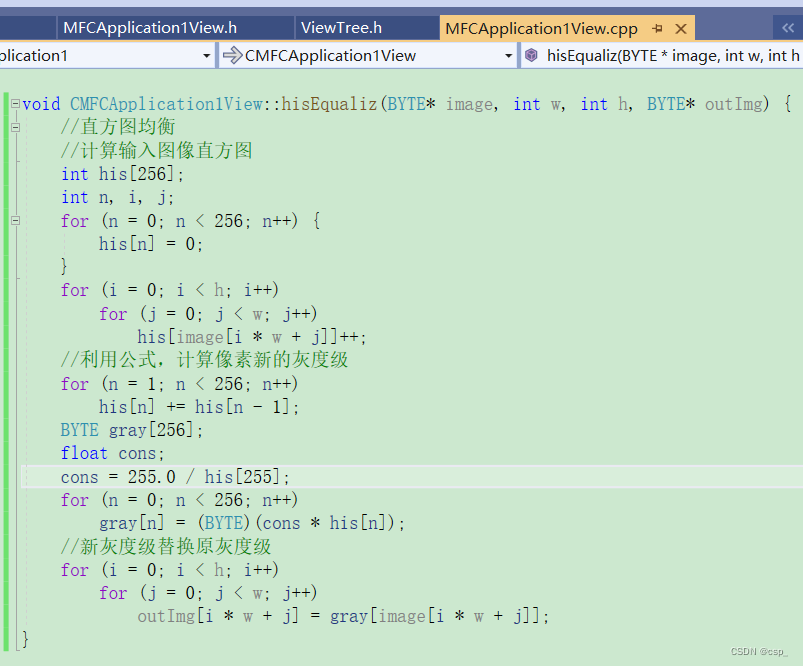
我们来研究一下代码,共有3步:
- 计算输入图像直方图
- 计算像素新的灰度级
- 新灰度级替换原灰度级
void CMFCApplication1View::hisEqualiz(BYTE* image, int w, int h, BYTE* outImg){
//直方图均衡
//计算输入图像直方图
int his[256];
int n,i,j;
for (n = 0; n < 256; n++){
his[n] = 0;
}
for (i = 0; i < h; i++)
for (j = 0; j < w; j++)
his[image[i * w + j]]++;
//利用公式,计算像素新的灰度级
for (n = 1; n < 256; n++)
his[n] += his[n - 1];
BYTE gray[256];
float cons;
cons = 255.0 / his[255];
for (n = 0; n < 256; n++)
gray[n] = (BYTE)(cons * his[n]);
//新灰度级替换原灰度级
for (i = 0; i < h; i++)
for (j = 0; j < w; j++)
outImg[i * w + j]=gray[image[i * w + j]];
}
其中注意一下BYTE* image的数据结构定义(在minwindef.h中):
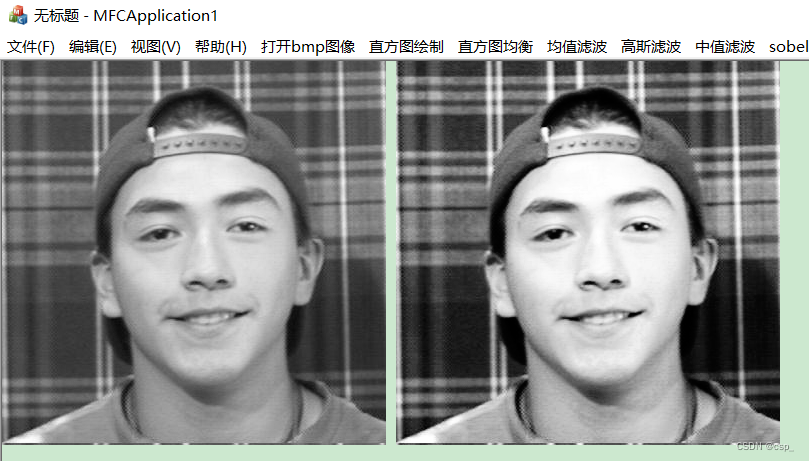
成功显示出结果:
核心代码位置:
3.2.卷积运算
这部分是看着这个学习的,在此推荐一下:
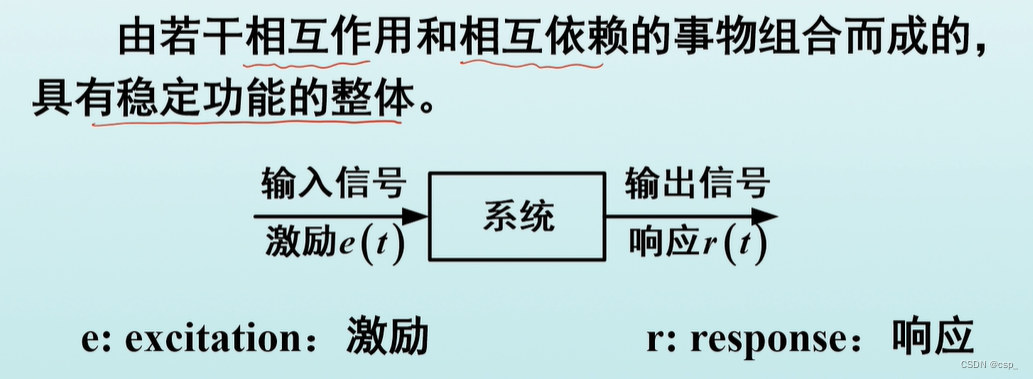
首先了解最基本的名词:
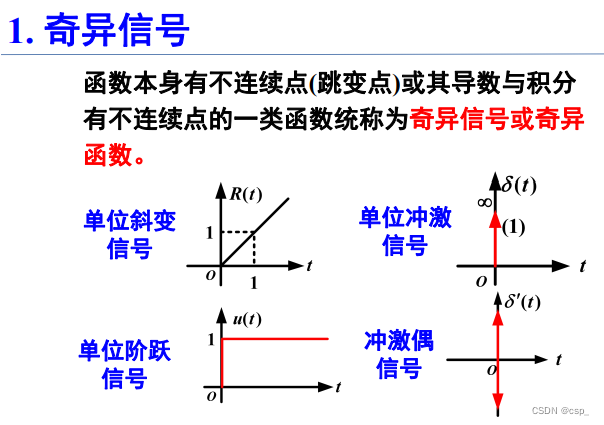
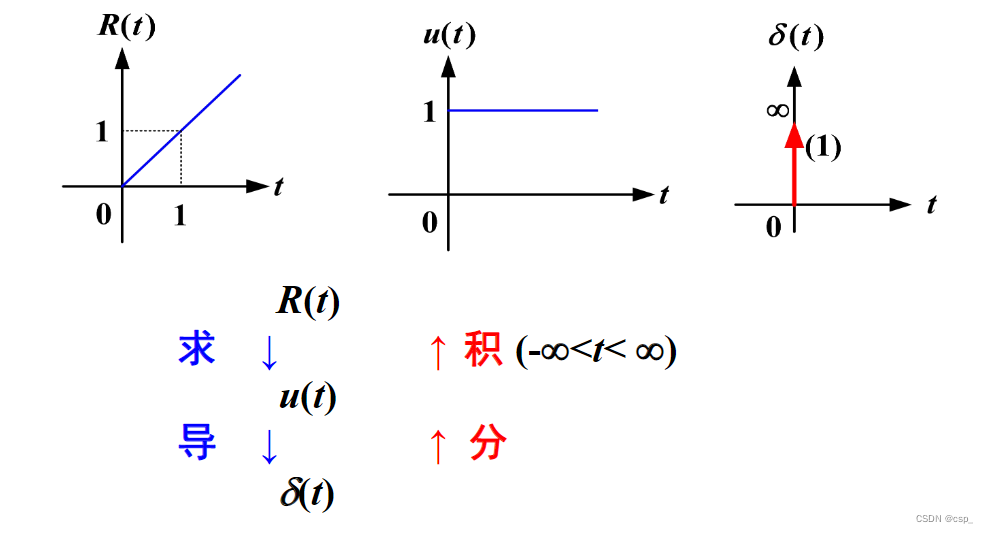
之后需要了解单位冲激函数和单位阶跃函数(一些奇异信号):
关系如下:
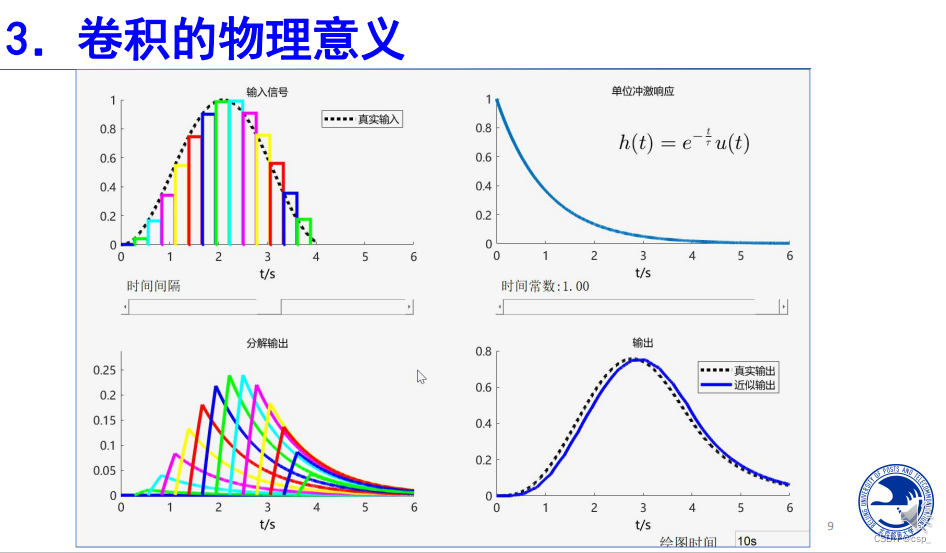
之后引入卷积:
从 τ = − ∞ \tau =-\infty τ=−∞到 ∞ \infty ∞, e ( t ) e(t) e(t)可表示为许多窄脉冲的叠加
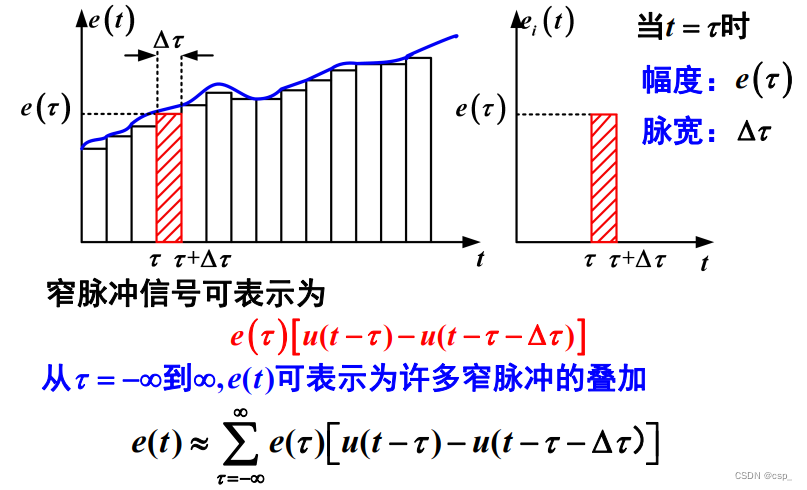
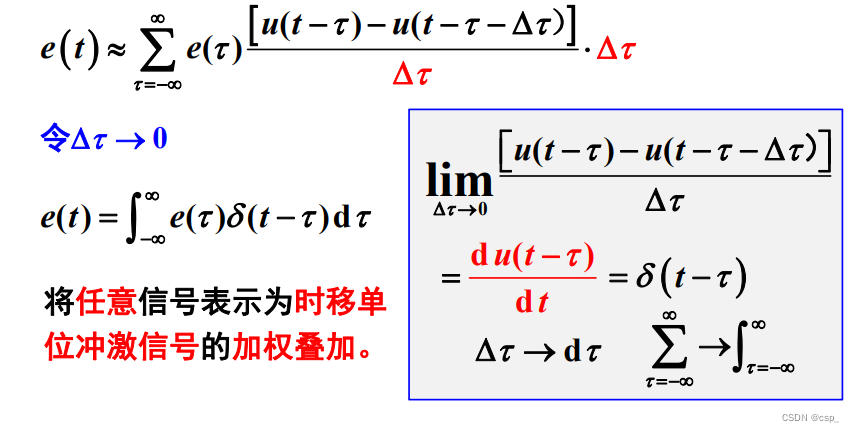
将任意信号表示为时移单位冲激信号的加权叠加:
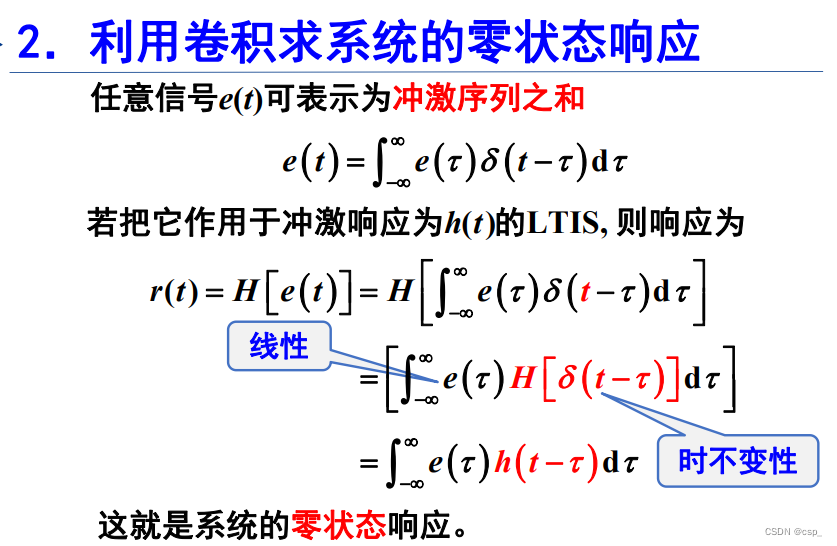
利用卷积求系统的零状态响应:
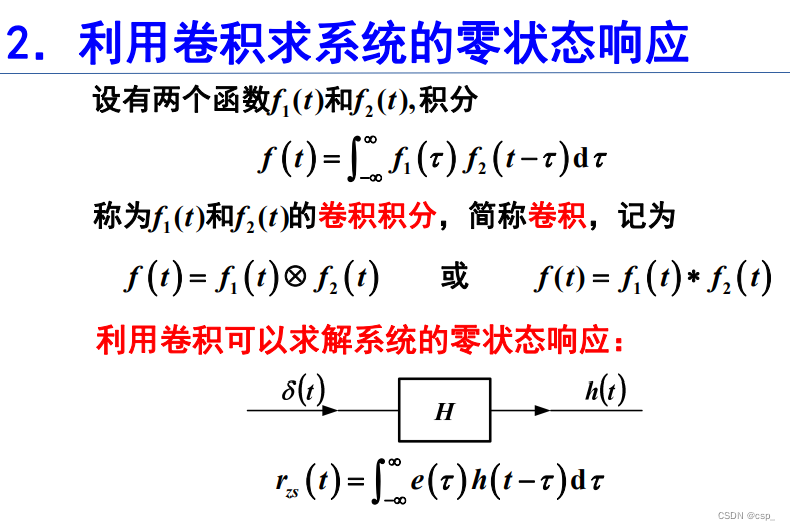
卷积的物理意义:
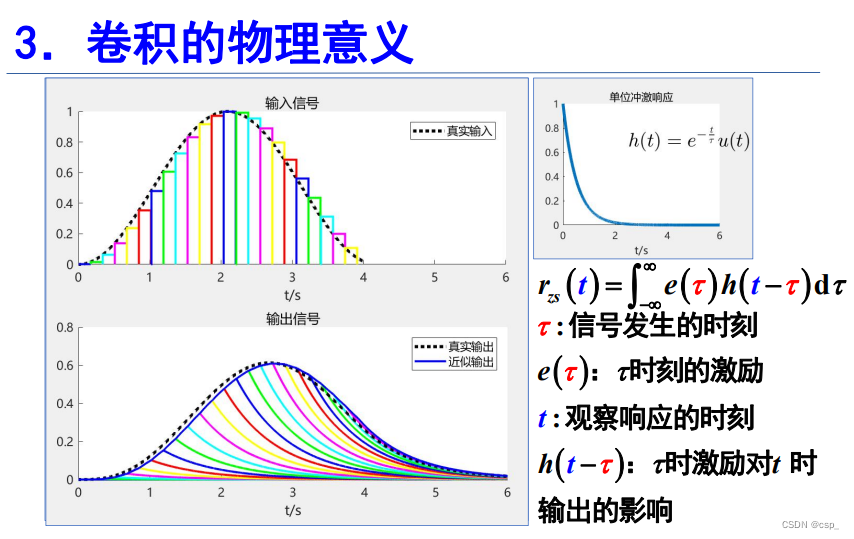
总结一下,公式即:
f
(
t
)
=
f
1
(
t
)
∗
f
2
(
t
)
=
∫
−
∞
∞
f
1
(
τ
)
f
2
(
t
−
τ
)
d
τ
f\left( t\right) =f_{1}\left( t\right) \ast f_{2}\left( t\right) =\int _{-\infty }^{\infty }f_{1}\left( \tau\right) f_{2}\left( t-\tau \right) d\tau
f(t)=f1(t)∗f2(t)=∫−∞∞f1(τ)f2(t−τ)dτ
3.3.低通滤波
低通滤波的显著作用:实现图像平滑

代码部分:
我们用到的卷积公式:
y
(
j
,
i
)
=
h
(
j
,
i
)
∗
j
(
j
,
i
)
=
∑
m
∑
n
h
(
m
,
n
)
x
(
j
+
m
,
i
+
n
)
y(j,i)=h(j,i)\ast j(j,i)=\sum _{m}\sum _{n}h(m,n)x(j+m,i+n)
y(j,i)=h(j,i)∗j(j,i)=m∑n∑h(m,n)x(j+m,i+n)
点对点相乘的代码:
int CMFCApplication1View::convolution(int* operatr, BYTE* block){
int value;
int i, j;
value = 0;
//卷积运算
for (i = 0; i < 3; i++)
for (j = 0; j < 3; j++)
value += operatr[i * 3 + j] * block[i * 3 + j];
return value;
}
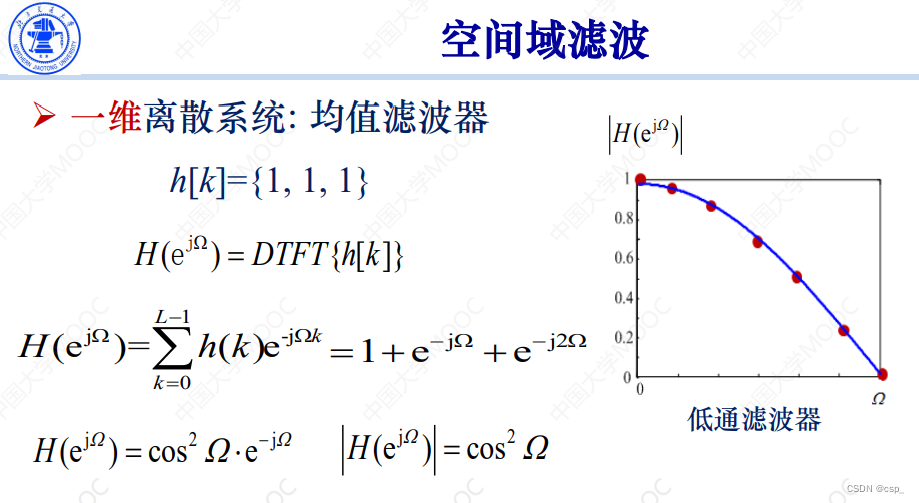
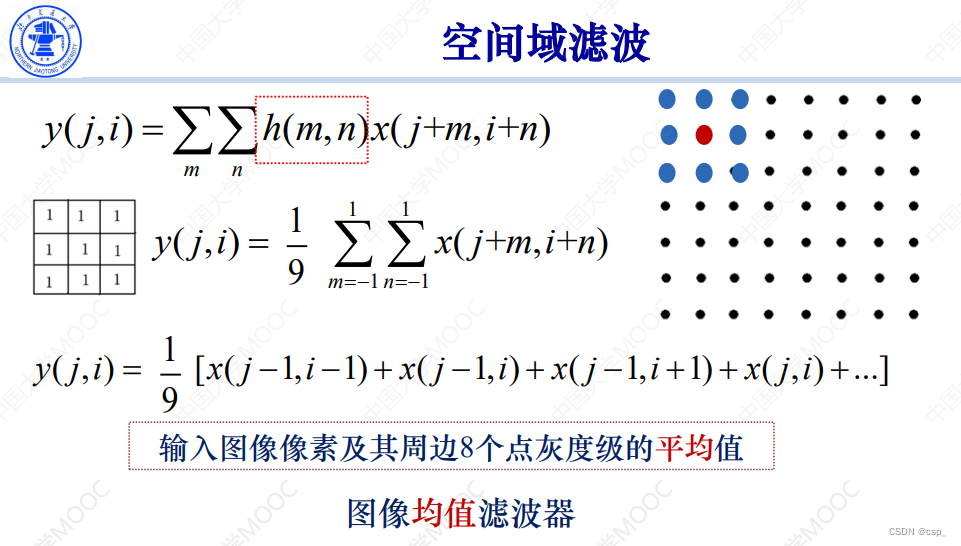
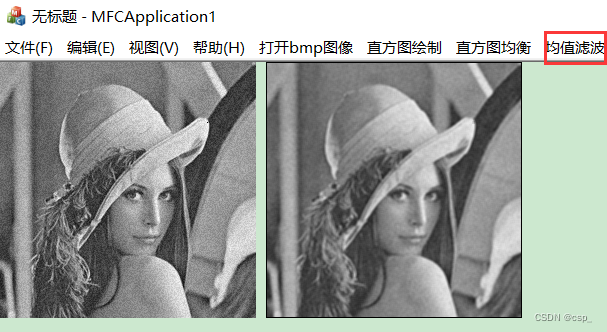
3.3.1.均值滤波(code)
y ( j , i ) = ∑ m ∑ n h ( m , n ) x ( j + m , i + n ) = 1 9 ∑ m = − 1 1 ∑ n = − 1 1 x ( j + m , i + n ) \begin{aligned}y(j,i)=\sum _{m}\sum _{n}h(m,n)x(j+m,i+n)\\ =\dfrac{1}{9}\sum ^{1}_{m=-1}\sum ^{1}_{n=-1}x(j+m,i+n)\end{aligned} y(j,i)=m∑n∑h(m,n)x(j+m,i+n)=91m=−1∑1n=−1∑1x(j+m,i+n)
注意 b l o c k block block 的大小设为9就可以了,省空间
void CMFCApplication1View::meanFilter(BYTE* image, int width, int heigth, BYTE* outImg){
//均值滤波
int smth[9];
int i, j, m, n;
BYTE block[9];
int value;
for (i = 0; i < 9; i++)
smth[i] = 1;
for (i = 0; i < height; i++){
for (j = 0; j < width; j++){
//最外面这一圈不做卷积运算了,即外圈灰度级直接置0
if (i == 0 || j == 0 || i == height - 1 || j == width - 1)
outImg[i * width + j] = 0;
else{
for (m = -1; m < 2; m++)
for (n = -1; n < 2; n++)
block[(m + 1) * 3 + n + 1] = image[(i + m) * width + j + n];
value = convolution(smth, block);
//归一化的步骤
outImg[i * width + j] = BYTE(value / 9.);
}
}
}
}
Additive_Noised_Image.raw
Pulse_Noised_Image.raw

3.3.2.高斯滤波(code)
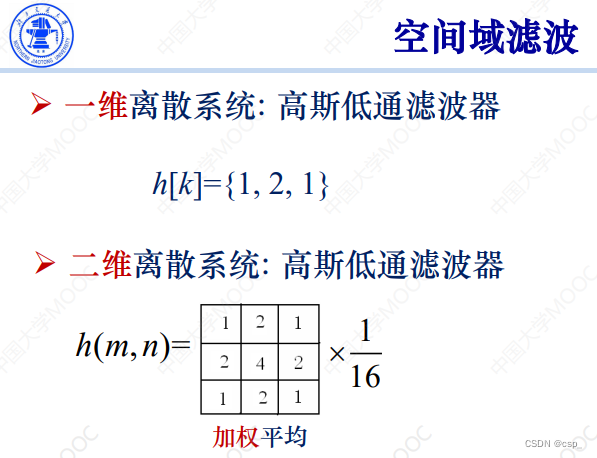
高斯滤波的归一化因子是16,因此除以16就行
void CMFCApplication1View::gaussian(BYTE* image, int width, int heigth, BYTE* outImg){
//高斯滤波
int smth[9];
int i, j, m, n;
BYTE block[9];
int value;
smth[0] = 1; smth[4] = 4;
smth[1] = 2; smth[5] = 2;
smth[2] = 1; smth[6] = 1;
smth[3] = 2; smth[7] = 2;
smth[8] = 1;
for (i = 0; i < height; i++){
for (j = 0; j < width; j++){
if (i == 0 || j == 0 || i == height - 1 || j == width - 1)
outImg[i * width + j] = 0;
else{
for (m = -1; m < 2; m++)
for (n = -1; n < 2; n++)
block[(m + 1) * 3 + n + 1] = image[(i + m) * width + j + n];
value = convolution(smth, block);
outImg[i * width + j] = BYTE(value / 16.);
}
}
}
}
Additive_Noised_Image.raw

Pulse_Noised_Image.raw

附上直方图均衡:
Additive_Noised_Image.raw
Pulse_Noised_Image.raw

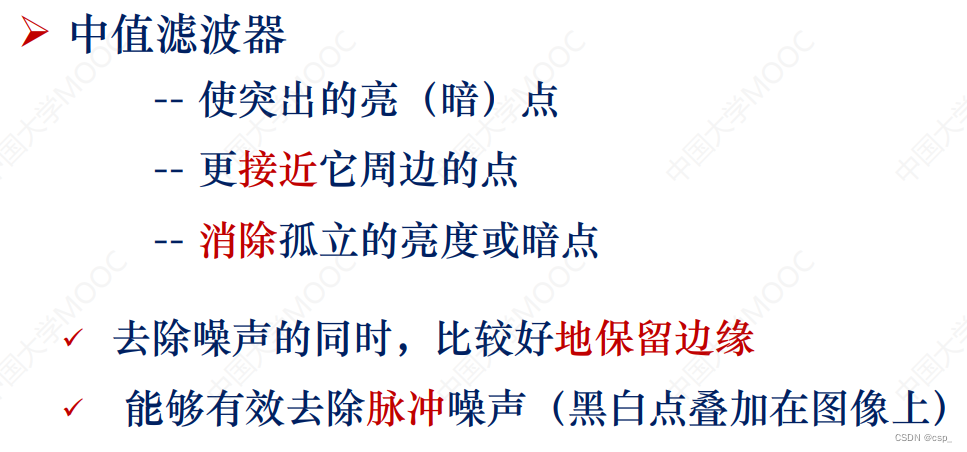
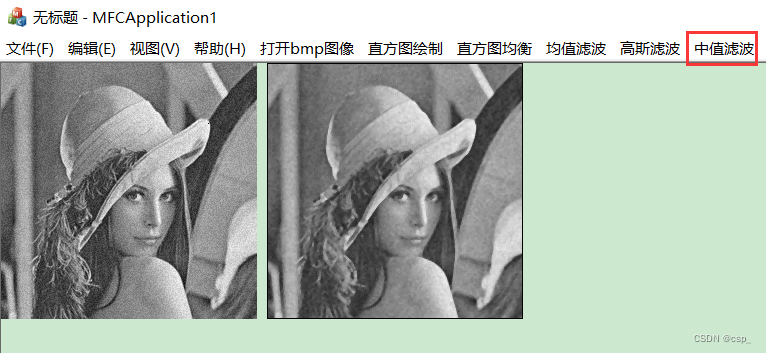
3.4.中值滤波(code)
为了在去除噪声的过程中、不模糊边缘,可以采用中值滤波:

代码部分:
中值滤波函数:
void CMFCApplication1View::midFindFiltering(BYTE* image, int width, int heigth, BYTE* outImg){
//中值滤波
int i, j, m, n;
BYTE block[9];
int value;
int blockNum = 9;
for (i = 0; i < height; i++){
for (j = 0; j < width; j++){
if (i == 0 || j == 0 || i == height - 1 || j == width - 1)
outImg[i * width + j] = 0;
else{
for (m = -1; m < 2; m++)
for (n = -1; n < 2; n++)
block[(m + 1) * 3 + n + 1] = image[(i + m) * width + j + n];
value = MidValueFind(blockNum, block);
outImg[i * width + j] = value;
}
}
}
}
O ( n 2 ) O(n^2) O(n2)的排序函数,有兴趣推荐改成 O ( n l o g n ) O(nlogn) O(nlogn):
int CMFCApplication1View::MidValueFind(int num, BYTE* d){
int value;
int i, j;
int temp;
for (i = 0; i < num - 1; i++)
for (j = i + 1; j < num; j++){
if (d[i] < d[j]){
temp = d[i];
d[i] = d[j];
d[j] = temp;
}
}
return d[num / 2];
}
中值滤波:
Additive_Noised_Image.raw
Pulse_Noised_Image.raw

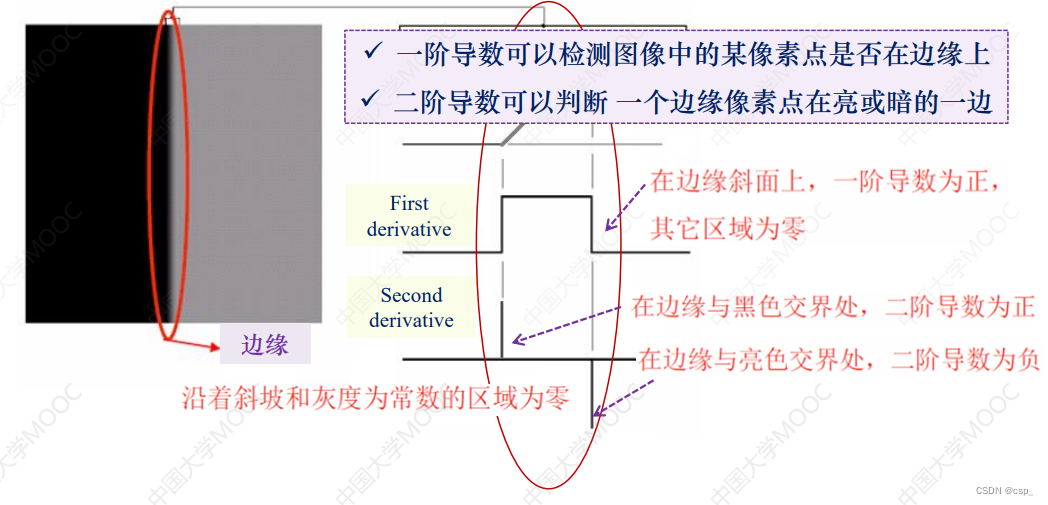
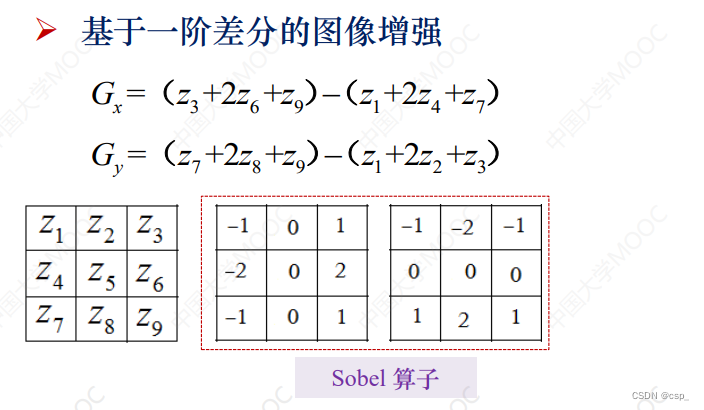
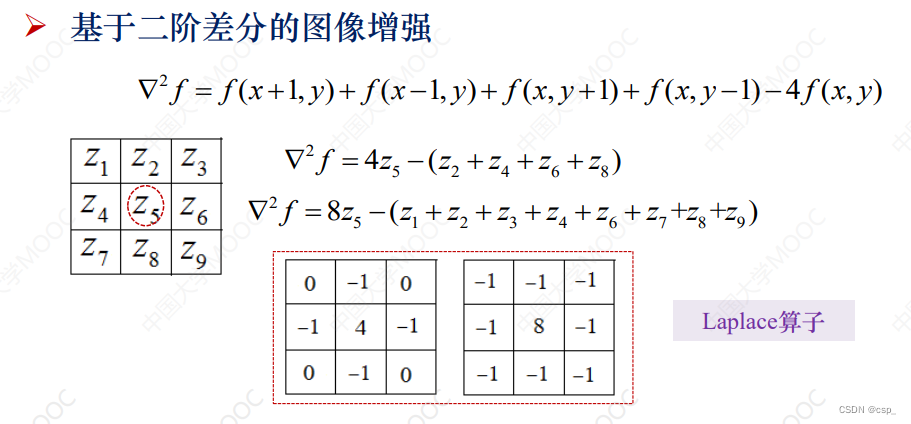
3.5.高通滤波
高通滤波的显著作用:实现图像锐化


4.第三章 数学形态学处理
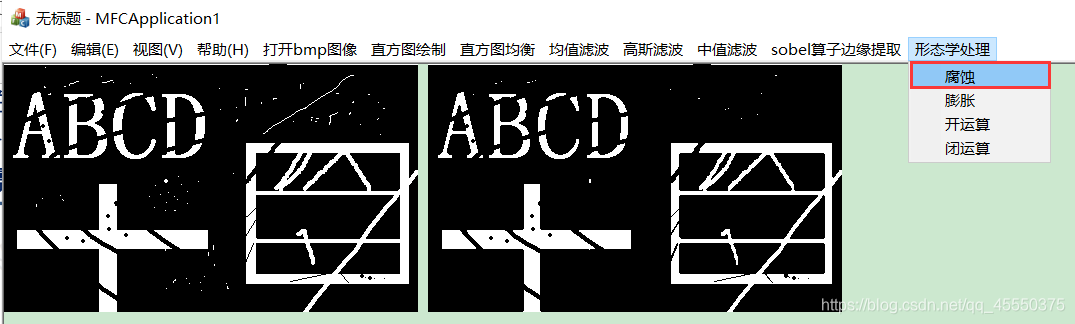
4.1.腐蚀(code)
- 一种消除边界点,使边界向内部收缩的过程,用来消除小且无意义的物体
- 图形点(gray=255)在其3x3邻域,只要有若干个背景点,则该点设为背景点(0)。

- 我们选择的是2值图像,即像素大小只有0(背景点)和255(图形点)
- 图像最外圈像素点不予处理
代码实现:
void CMFCApplication1View::erosion(BYTE* image, int w, int h, BYTE* outImg){
int rept;
//多次腐蚀,把结果图像image拷贝至outImg
memcpy(outImg, image, sizeof(BYTE) * width * height);
int i, j;
int m, n;
BYTE flag;
for (rept = 0; rept < 3; rept++){//多次腐蚀
for (i = 1; i < h - 1; i++){
for (j = 1; j < w - 1; j++){
if (image[i * w + j] == 255){//找到一个图形点
flag = 0;
for (m = -1; m < 2; m++){
for (n = -1; n < 2; n++){
if (image[(i + m) * w + j + n] == 0){
flag++;//3x3邻域包含多少个背景点
break;
}
}
}
if (flag > 2)
outImg[i * w + j] = 0;//该图形点设为背景点
}
}
}
}
memcpy(image, outImg, sizeof(BYTE) * width * height);
}
腐蚀结果:
4.2.膨胀(code)
将与物体接触所有背景点合并到该物体中,使边界向外部扩张的过程,可以用来填补物体中的空洞

与腐蚀不同的是,我们关注的是图像的背景点,如果背景点周围有一定个数的图形点,我们就将这个背景点设为图形点
代码实现:
void CMFCApplication1View::dilation(BYTE* image, int w, int h, BYTE* outImg){
int rept;
//膨胀
memcpy(outImg, image, sizeof(BYTE) * width * height);
int i, j;
int m, n;
BYTE flag;
for (rept = 0; rept < 3; rept++){//多次膨胀
for (i = 1; i < h - 1; i++){
for (j = 1; j < w - 1; j++){
if (image[i * w + j] == 0){//找到一个背景点(gray=0)
flag = 0;
for (m = -1; m < 2; m++){
for (n = -1; n < 2; n++){
if (image[(i + m) * w + j + n] == 255){
flag++;//3x3邻域包含多少个图形点
}
}
}
if (flag > 1)
outImg[i * w + j] = 255;//该图形点设为图形点
}
}
}
}
memcpy(image, outImg, sizeof(BYTE) * width * height);
}
膨胀:

4.3.开运算
先腐蚀后膨胀,能够消除图像区域 外 的 小白点(噪声)

4.4.闭运算
先膨胀后腐蚀,能够消除图像区域 内 的 小黑点(噪声)

开闭运算可以保持物体原有大小,一个是消除物体外部噪声(开运算)的,另一个是增强物体之间连接点(闭运算)的
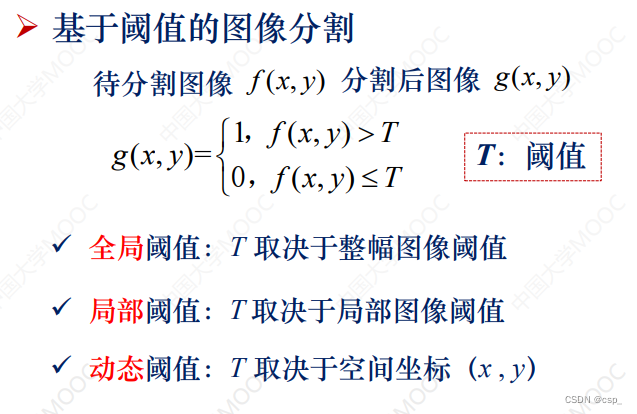
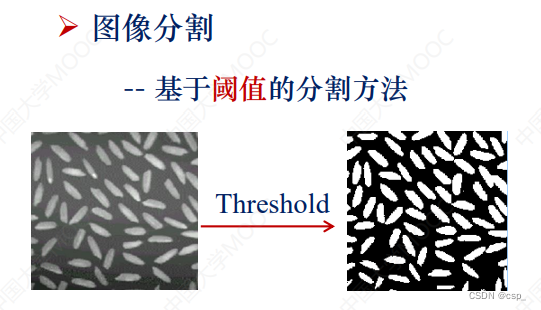
5.第四章 图像分割
5.1.基于阈值的方法
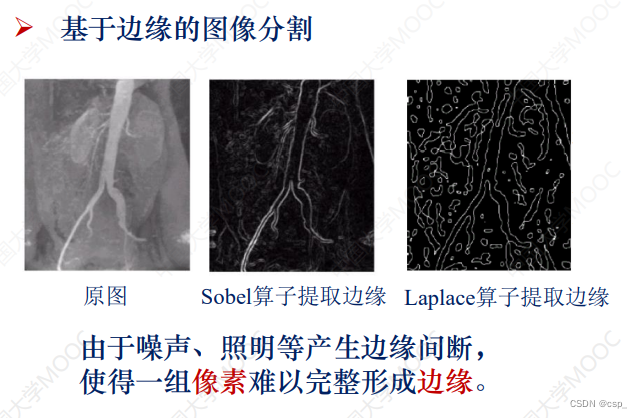
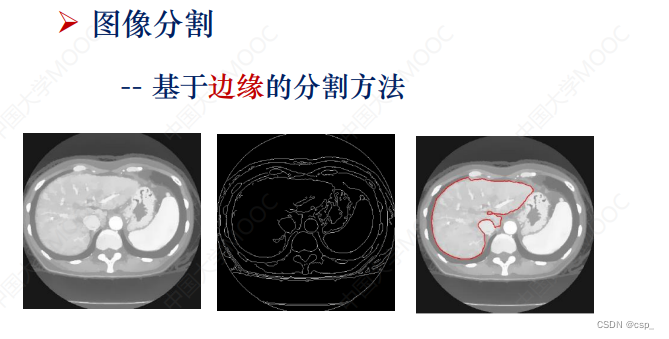
5.2.基于边缘的方法
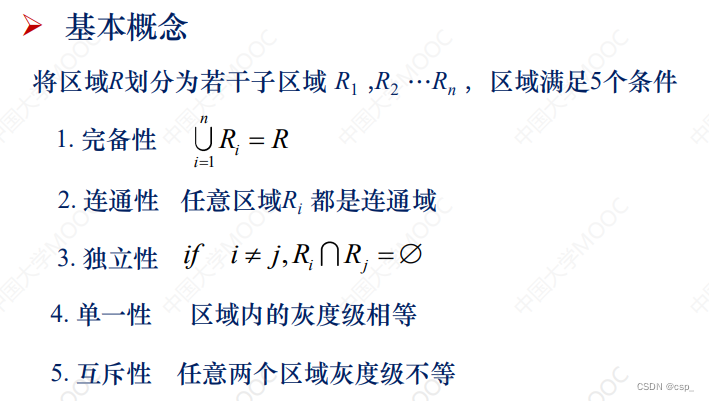
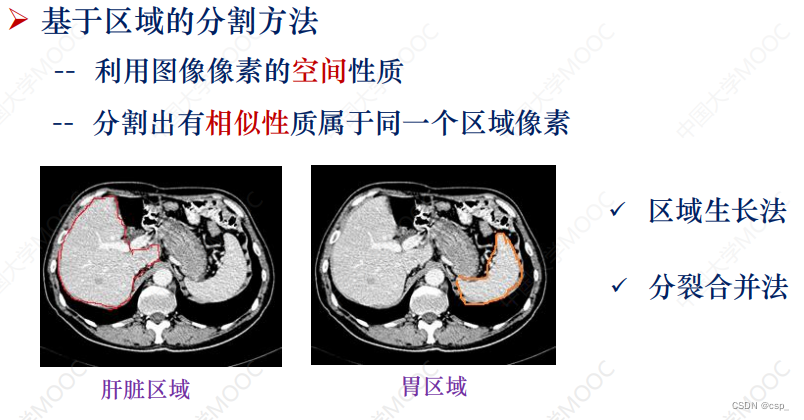
5.3.基于区域的方法
5.4.基于学习的方法

6.总结

数字图像处理需要认真的分析,本文涉及的算法都很简单,而且自己动手调参就可以看到变化,也易于解释(比如在腐蚀运算中,把邻域背景点判断范围从大于2放大为大于1)

CSDN联合极客时间,共同打造面向开发者的精品内容学习社区,助力成长!
更多推荐



 20
20 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)