




- @xinjiang666
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
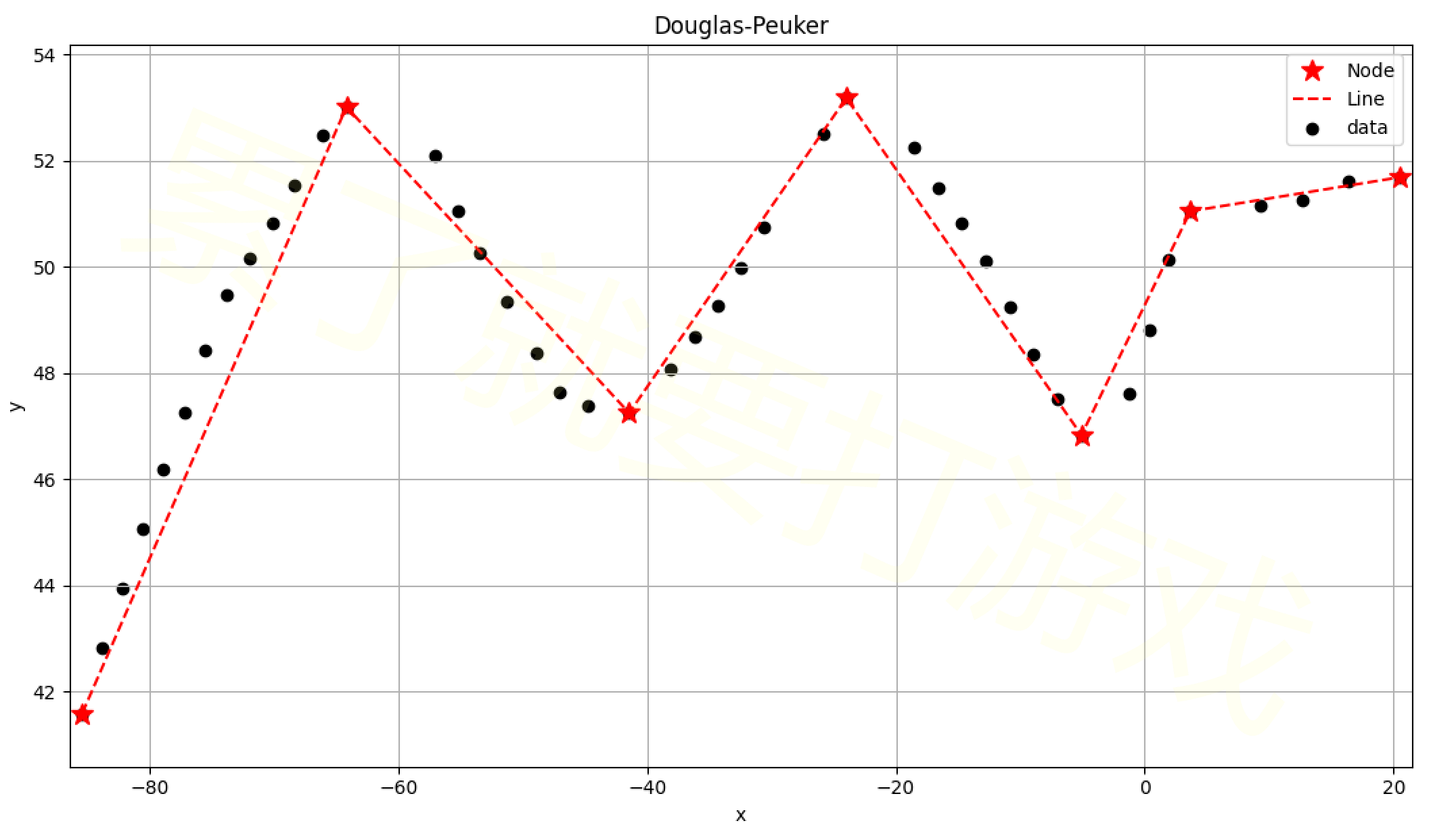
道格拉斯-普客抽稀算法的动态图解
点云数据的应用范围越来越广泛,python...嗯...简单,封装多。介绍几个点云数据处理的python库,我用得少(C++才是王道),不喜勿喷,欢迎探讨。一、libLASlibLAS是一个C/C++/Python库(接触的第一个点云处理库),用于读写LAS格式的点云。libLAS支持ASPRS LAS格式规范版本:1.0、1.1、1.2和1.3(基本支持)。虽然libLAS已经被PDAL / L
点云是一种三维数据,文件格式多种多样,以满足不同的需求。1 *.lasLAS文件格式是一种用于交换三维点云数据的公共文件格式,由美国摄影测量和遥感学会(ASPRS)维护。该格式不仅可以用于激光雷达点云数据,还支持其他任何三维xyz元组。该格式是专有系统或通用ASCII文件交换系统的替代方案,专有系统的问题很明显:数据不能轻易地从一个系统转移到另一个系统。ASCII 文件交换有两个主要问题。第一个问
激光测距的方法大体可以分为两种:ToF(Time of Flight)测距(包括脉冲测距、相位测距)和三角测距。ToF测距是通过测量光的飞行时间来计算距离。激光器发射一个激光脉冲,并由计时器记录下出射的时间,回返光经接收器接收,并由计时器记录下回返的时间。两个时间相减即得到了光的“飞行时间”,而光速是一定的,因此在已知速度和时间后很容易就可以计算出距离。根据发射激光信号的不同形式,ToF测距法可分
迭代//Open3D#include "Open3D/Open3D.h"//Eigen#include "Eigen/Dense"void testOpen3D::xjGetInformation(const QString &pcPath){/* read PC */auto cloud_ptr = std::make_shared<open3d::geometry::PointC
一、LAStools / LASlibLAStools官网LAStools的Github地址二、读写LAS分享给有需要的人,代码质量勿喷。2.1 读取LAS信息//LASlib#include "LASlib/inc/lasreader.hpp"/* read las */bool testLASlib::ReadLas(std::vector<xjP...