




- @xiaolong1126626497
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
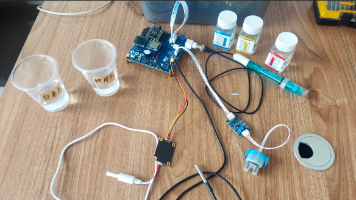
本项目设计了一种基于ESP32的河流水质检测装置,通过集成水温、PH、电导率以及浊度等关键水质参数检测模块,实现对河流水体状态的实时采集与分析
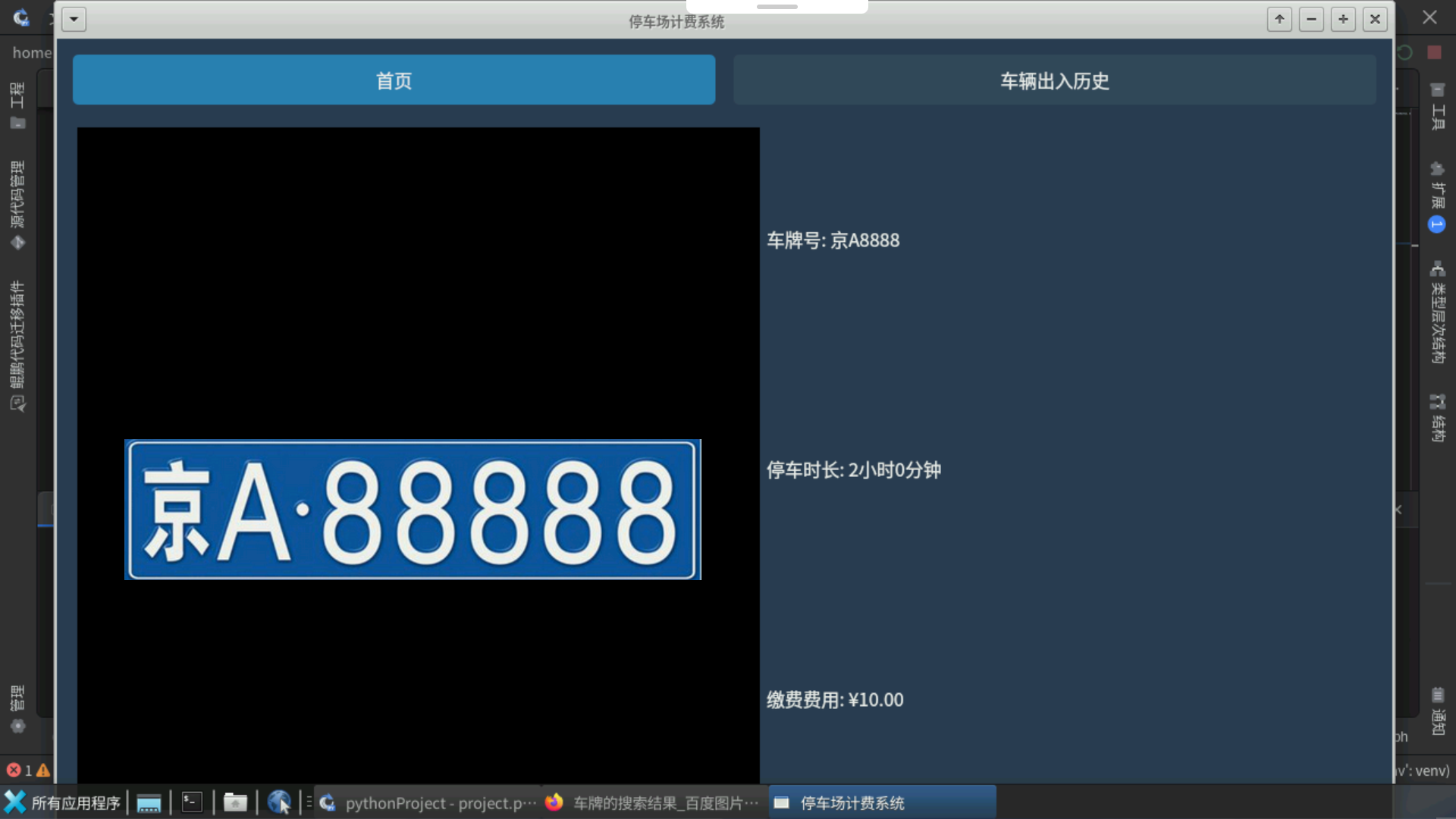
本项目利用华为云的车牌识别服务,设计并实现一个停车场自动计费系统。通过对车辆进入和离开时间的记录和识别,系统能够自动计算停车费用,减少人工干预,提升用户体验。项目采用Python语言进行开发,结合PyQt5进行用户界面设计,为系统提供简洁友好的操作界面,同时依托Ubuntu操作系统的稳定性和开放性,确保系统运行的高效性和安全性。
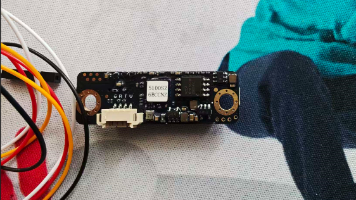
系统以STM32F103C8T6单片机作为核心控制单元,结合ATGM336H北斗+GPS双模定位模块、Air780E 4G通信模块、电池供电管理电路以及本地报警与状态显示模块,构建了集定位采集、无线通信、围栏监测、异常报警和远程管理于一体的智能监护平台。

最近抖音很火的月薪喵,很多小伙伴也想使用单片机尝试运行一下。这里我就更新一篇文章带大家入个门,使用ESP32-S3来完成这个月薪喵特效图显示的功能。这两个月抖音月薪喵 相关话题播放量几十亿,二创跳舞视频、特效模板刷屏。微信 / QQ:聊天群高频出现,成了 “打工人通用表情包”。下面就以0基础的方式展示ESP32如何加一个OLED显示屏来完成这个功能。当前的环境采用的Arduino-IDE来开发ES
该系统以STM32F103RCT6为主控芯片,采用JSY-MK-1031电力参数采集模块实时测量充电过程中的电压、电流、有功功率、功率因数、频率和累计用电量等关键电力参数,并利用SHT30温湿度传感器监测充电环境状态。系统通过ESP8266模块连接华为云IoT物联网平台,将采集到的充电数据实时上传至云端,实现数据的远程存储与管理。

本课题设计了一种基于物联网技术的蜂箱智能监测系统。系统以ESP32-S3-N8R8作为核心控制器,结合温湿度传感器、重量传感器、声音采集模块、光照传感器以及震动检测模块,实现蜂箱运行状态的全面感知。通过ESP32-S3内置WiFi功能将监测数据上传至OneNet物联网平台,并采用微信小程序实现数据可视化显示和远程参数配置,使养蜂人员能够随时掌握蜂箱运行情况,及时发现异常状态并进行处理。

本项目正是针对这一市场痛点与技术需求,设计并实现了一套基于STM32微控制器的智能康养木屋监测系统。系统将嵌入式技术与物联网云平台深度融合,改变传统人工管理环境的弊端,通过全方位、自动化的感知与控制,为住户提供全天候的健康守护。在技术选型上,系统采用高性价比的STM32F103C8T6作为核心控制单元,通过多传感器联动,实现对室内温湿度、二氧化碳、PM2.5、环境光以及人员活动状态的精准采集;同时

本项目旨在设计并实现一套基于ESP32-S3主控、BE5100SZ人脸识别模块、本地按键与OLED显示屏,结合华为云IoT服务器与微信小程序的全功能智能人脸识别门禁系统。该系统既支持本地人脸录入、删除、识别及密码开锁等基础功能,也支持通过微信小程序进行远程开锁控制,同时兼顾低功耗休眠唤醒与用户界面反馈等实用细节。通过这一设计,期望为智能家居安防领域提供一种高安全性、易于部署、交互友好的技术解决方案
本项目旨在设计并实现一套基于ESP32-S3主控、BE5100SZ人脸识别模块、本地按键与OLED显示屏,结合华为云IoT服务器与微信小程序的全功能智能人脸识别门禁系统。该系统既支持本地人脸录入、删除、识别及密码开锁等基础功能,也支持通过微信小程序进行远程开锁控制,同时兼顾低功耗休眠唤醒与用户界面反馈等实用细节。通过这一设计,期望为智能家居安防领域提供一种高安全性、易于部署、交互友好的技术解决方案
项目利用百度飞浆(PaddlePaddle)深度学习框架中的目标检测和分类算法,通过安装在机器人上的高清摄像头获取果树图像,并进行实时分析,精准识别出果实的位置、大小以及成熟度等信息。当成功识别到目标果实后,主控系统将根据识别结果快速计算出机械手臂的最佳运动路径,控制其移动至指定位置,以最适宜的方式完成果实的高效、无损采摘。
