- @weixin_67624305
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
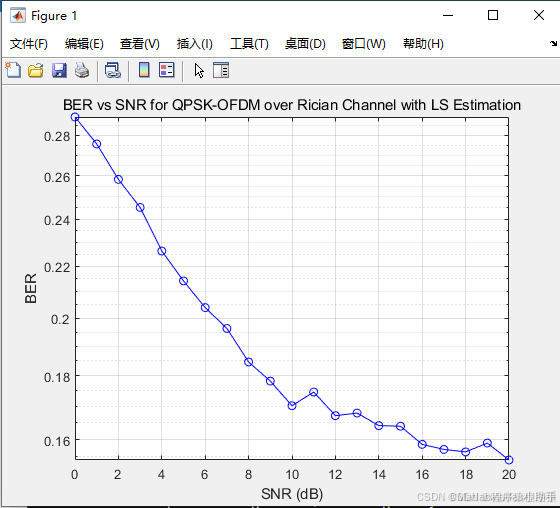
总的来说,本系统通过OFDM调制、莱斯信道传输、最小二乘信道估计和QPSK解调等步骤,完成了对QPSK-OFDM系统在莱斯信道下性能的仿真评估。系统采用最小二乘信道估计算法,通过导频信号对信道频率响应进行估计,并对接收符号进行信道均衡,最终计算得到误码率。具体方法是,通过导频信号的接收值与发射值之比来估计导频位置的信道频率响应,然后通过插值方法将信道频率响应扩展到所有子载波上。在未来的研究和应用中
在MBO算法中,这种迁徙行为被抽象为种群优化的核心机制,用于解决多种复杂的优化问题。在种群进化过程中,适应度较低的个体会逐步被淘汰,从而使得种群朝着更优的方向进化。首先,MBO在全局搜索与局部开发之间实现了较好的平衡,能够在较短时间内获得高质量的解。其次,MBO通过引入迁徙与繁殖机制,增强了种群的多样性,避免了算法陷入局部最优。此外,MBO算法的实现较为简单,对问题的数学模型没有过多限制,因此适用
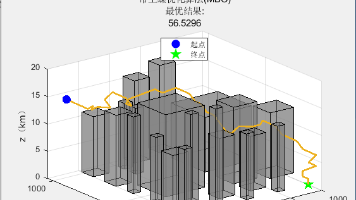
在MBO算法中,这种迁徙行为被抽象为种群优化的核心机制,用于解决多种复杂的优化问题。在种群进化过程中,适应度较低的个体会逐步被淘汰,从而使得种群朝着更优的方向进化。首先,MBO在全局搜索与局部开发之间实现了较好的平衡,能够在较短时间内获得高质量的解。其次,MBO通过引入迁徙与繁殖机制,增强了种群的多样性,避免了算法陷入局部最优。此外,MBO算法的实现较为简单,对问题的数学模型没有过多限制,因此适用

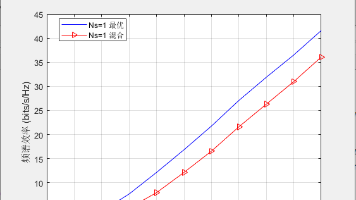
总结来说,基于OMP算法的5G毫米波MIMO系统中的混合波束成形方案是一种在硬件资源有限的情况下,最大化通信性能的有效方法。在这个过程中,预编码矩阵和接收矩阵并不是直接通过全数字处理得到的,而是通过模拟和数字的混合方法计算出来的,这就是所谓的混合波束成形。在整个过程中,系统还需要考虑信道噪声的影响。在未来的研究中,如何进一步提升OMP算法的性能,减少其在复杂信道环境下的性能损失,以及结合更多先进的
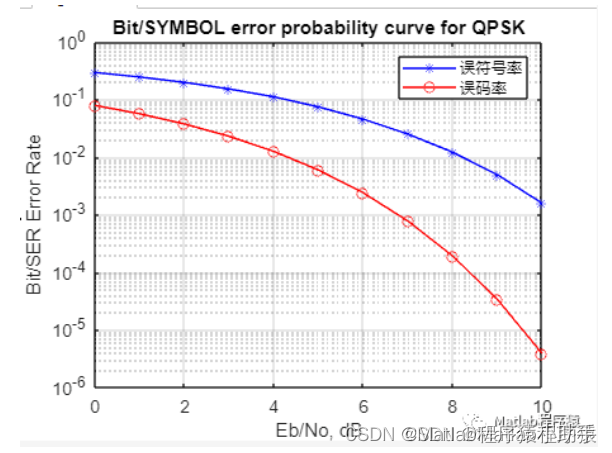
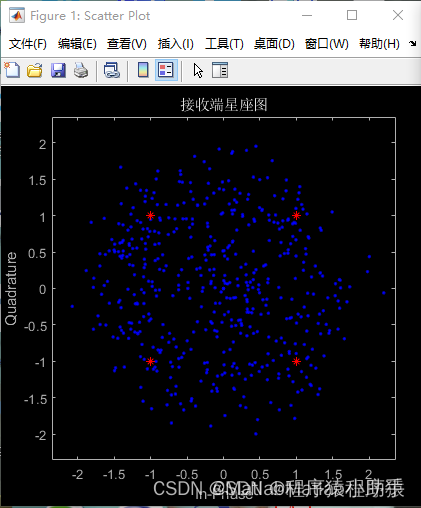
由于无线电通讯的带宽都是由FCC一类部门所事先分配规定的,QPSK较之于BPSK的优势便开始显现出来:QPSK系统在给定的带宽内可以在BER相同的情况下可以提供BPSK系统两倍的带宽。**锁相环(PLL)** 是一种控制系统,用于将一个参考信号的相位与一个输入信号的相位同步。4. **分频器(Divider):** 这个组件将振荡器的输出分频,生成一个或多个较低频率的信号,用于各种应用中。5. *
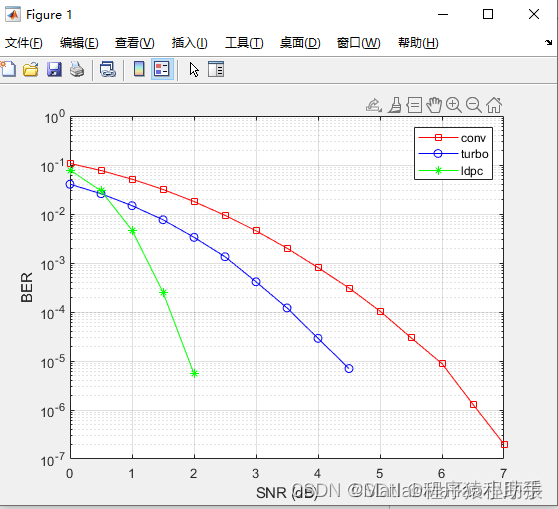
如上图(1)所示,在信噪比较小时,Turbo码的BCJR译码性能要明显优于卷积码,但随着信噪比的增加,这种优势逐渐变弱,直至消失。仿真量(对每个SNR值,发送信源符号的个数)的选择:根据蒙特卡罗仿真量确定方法的结论,对于误码率仿真统计而言,只有平均出错个数大于100,才能将相对误差超过20%的可能性控制在5%以内。但这种关系也不是一定的,当LDPC的码长较小时,其性能也可能比Turbo码的性能要差
如果未除尽,则在寄存器中的内容就是错误图样,根据错误图样可以确定一种逻辑,来确定差错的位置,从而达到纠错的目的。循环码是一种无权码,循环码编排的特点是相邻两个数码之间符合卡诺图中的邻接条件,即相邻两个数码之间只有一位码元不同,码元就是组成数码的单元。循环码的优点是没有瞬时错误,因为在数码变换过程中,在速度上会有快有慢,中间经过其它一些数码形式,称它们为瞬时错误。循环码最大的特点就是码字的循环特性,

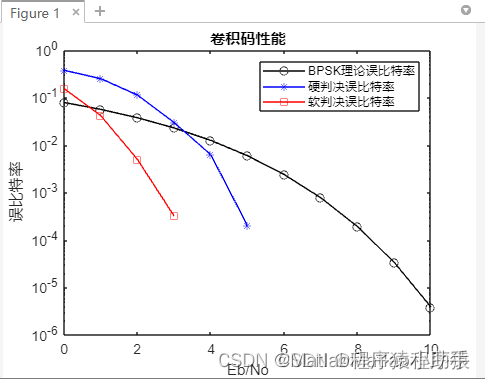
因此,硬判决适用于简单的通信系统,而软判决适用于需要更高纠错性能的系统。1. **生成多项式**:217卷积码由生成多项式定义。3. **编码率**:217卷积码通常以"2/7"编码率工作,这意味着每2个输入比特会产生7个编码比特。- 对于每个接收比特,软判决为其分配一个对数似然比(LLR)值,表示该比特为1的可能性相对于为0的可能性的对数比例。- 正的LLR表示更可能是1,负的LLR表示更可能是
在轴承故障诊断中,传感器采集到的振动信号往往是多个源信号的叠加,包括正常运转的机械信号、环境噪声以及故障信号。首先,EMD 提供了一种灵活的方式来捕捉信号中的非线性和非平稳特征,使得信号的分解更加符合实际的物理过程。传统的信号处理方法通常假设信号是线性和稳态的,但在实际工程应用中,许多信号,包括轴承振动信号,都是非线性和非平稳的。因此,EMD 为这些复杂信号的分析提供了一个有效的工具。在轴承故障诊

由于无线电通讯的带宽都是由FCC一类部门所事先分配规定的,QPSK较之于BPSK的优势便开始显现出来:QPSK系统在给定的带宽内可以在BER相同的情况下可以提供BPSK系统两倍的带宽。图中采用格雷码来达到最小位元错误率(BER) — 是BPSK的两倍. 这意味著可以在BPSK系统带宽不变的情况下增大一倍数据传送速率或者在BPSK数据传送速率不变的情况下将所需带宽减半。数学分析表明,QPSK既可以在