
写文章




- @weixin_60760661
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
“笨拙机器人”难题:为什么成功率在AI评估中对我们撒了谎?
为了防止这种虚假的安全感,开发者必须引入“最小运动阈值(minimal motion thresholds)”,以区分真正优雅流畅的机器人和仅仅是死机的机器人。我们必须摆脱“钻空子的技术性成功”,转向一种新的范式:评估标准必须将特定的硬件(无论是 WidowX 机械臂还是 Google Robot)以及底层模型的“置信度”纳入考量。,也可能导致现实世界中的灾难。针对机器人“智能”的最新研究,终于揭

“笨拙机器人”难题:为什么成功率在AI评估中对我们撒了谎?
为了防止这种虚假的安全感,开发者必须引入“最小运动阈值(minimal motion thresholds)”,以区分真正优雅流畅的机器人和仅仅是死机的机器人。我们必须摆脱“钻空子的技术性成功”,转向一种新的范式:评估标准必须将特定的硬件(无论是 WidowX 机械臂还是 Google Robot)以及底层模型的“置信度”纳入考量。,也可能导致现实世界中的灾难。针对机器人“智能”的最新研究,终于揭
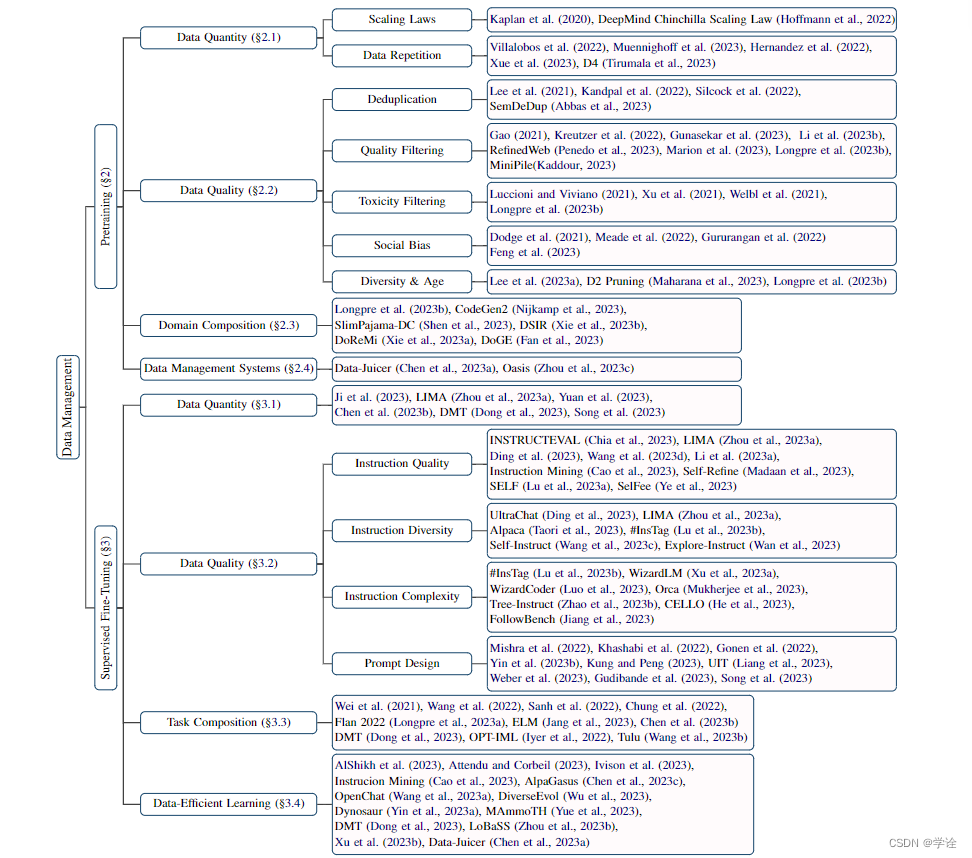
大模型的数据管理——论文精读
随着人工智能技术的飞速发展,大型语言模型(LLMs)已经成为自然语言处理(NLP)领域的一项突破性进展。这些模型通过在海量文本数据上进行预训练,展现出了强大的语言理解和生成能力,从而在多种NLP任务中取得了令人瞩目的成果。然而,LLMs的成功不仅依赖于其复杂的模型架构,更关键的是它们所依赖的高质量、大规模的数据集。数据管理,即如何有效地组织和处理这些数据,对于LLMs的性能提升和训练效率至关重要。
到底了