- @weixin_56877343
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
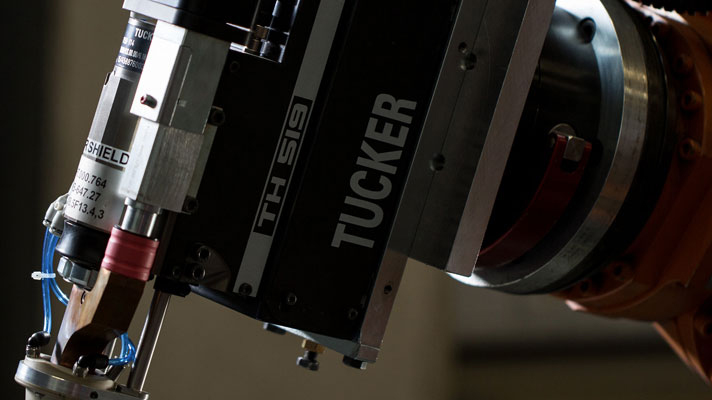
准备好要焊接的螺柱和工件。确保螺柱和工件的质量和尺寸符合要求。选择适合螺柱焊接工艺的机器人。通常选择具有高精度、稳定性和多轴运动能力的工业机器人。设计一个供给系统,将螺柱自动供给给机器人。这可以包括自动进料装置,确保螺柱在焊接过程中的位置准确。设计焊接路径,确定螺柱焊接的位置和顺序。这些路径可以通过CAD模型、产品设计图纸等获得。设置适合螺柱焊接的焊接参数,如焊接电流、焊接速度、电极压力等。设计夹
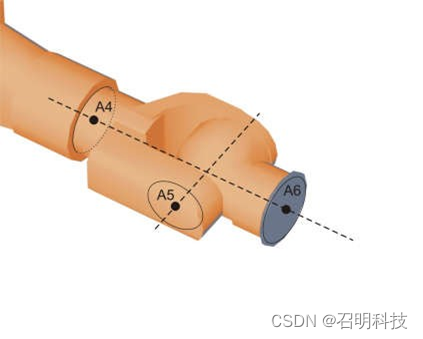
轴A4和A6的位置可以有任意多的可能性,但其轴角度总和均相同。1:轴A2的角度从起始点一直到目标点保持不变。机器人处于其工作范围的边缘,通过逆向变换将得出唯一的轴角度,但较小的笛卡尔速度变化将导致轴A2和A3的轴速较大。对于延伸位置奇点来说,腕点(即轴A5的中点)垂直于机器人的轴A2和A3。对于顶置奇点来说,腕点(即轴A5的中点)垂直于机器人的轴A1。1:轴A1的角度从起始点一直到目标点保持不变。
开始学习时,建议先从基础理论开始,然后逐步过渡到更具体的KUKA知识和实践操作。同时,保持对新技术的关注和学习是非常重要的。
这需要考虑涂胶的起始点、终点、路径、速度等参数。根据胶液的性质和工件的要求,设置机器人的涂胶参数,如喷嘴速度、喷嘴距离、涂胶厚度等。胶液的选择会影响涂胶机器人的参数设置。机器人涂胶工艺通常可以实现自动化控制,可以通过传感器反馈、视觉系统和编程来自动调整涂胶的位置、厚度等参数。进行涂胶后,可能需要对涂胶质量进行测试,确保涂胶效果符合要求。这可能涉及清洁、处理、定位等操作,以确保涂胶的精确性和质量。记

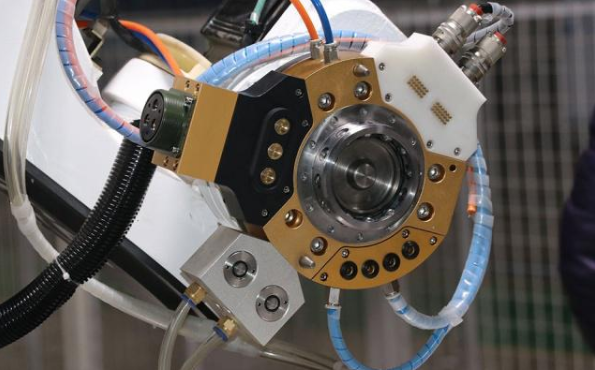
在适配系统中,集成自动化换枪机构,这可以是电动或气动的。这个机构可以在机器人需要切换焊枪时,自动释放当前的焊枪,并将新的焊枪插入到适配系统中。当需要切换焊接工艺时,通过控制信号触发自动化换枪机构的操作,确保焊枪的顺利更换。首先,需要设计一个适配系统,用于容纳不同类型的焊枪或焊接工具。这可以确保焊枪被正确地插入,并且稳固地固定在适配系统中,以避免焊接过程中的问题。确保不同类型的焊枪或焊接工具都符合标