- @weixin_55024277
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
enum设置的属性都是到时候用来做指令下发的,其余是上传传感器数据的。要注意onenet平台接受的是json格式数据,而且上传的数据格式必须与你设置的对应上。id不用改,主要是temper标识符和value后面的格式 %d 需要和你设置的物模型对应上。这样选择的就是物模型,之后可以去使用物模型的API调试。之前只做过类似的但是以为这种烂大街的功能应该不难结果还是踩了不少坑,记录几个需要注意的点。单

本文主要是为了备赛第十八届全国大学生智能车竞赛,基于逐飞开源库和芯片数据手册的一些学习总结,使用英飞凌官方的AURIX Development Studio开发环境。正如STM32的开发方式有标准库和HAL库,Infineon单片机也有官方库,而逐飞开源库则是在官方库的基础上又封装了一层,变成了易使用、易理解的API,极大的方便我们调用和编写程序。那么对于智能车比赛,必须熟练掌握的内容有:GPIO
enum设置的属性都是到时候用来做指令下发的,其余是上传传感器数据的。要注意onenet平台接受的是json格式数据,而且上传的数据格式必须与你设置的对应上。id不用改,主要是temper标识符和value后面的格式 %d 需要和你设置的物模型对应上。这样选择的就是物模型,之后可以去使用物模型的API调试。之前只做过类似的但是以为这种烂大街的功能应该不难结果还是踩了不少坑,记录几个需要注意的点。单
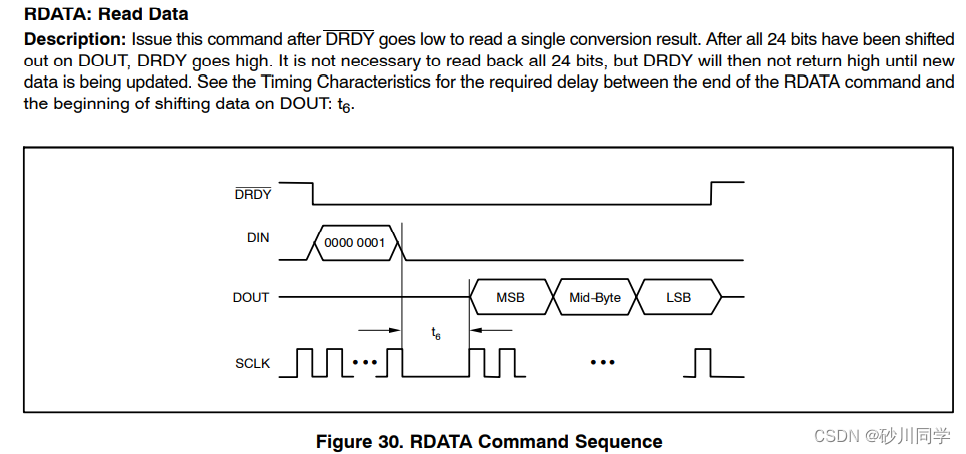
采用四线SPI,DRDY配置为下降沿触发中断,RESET引脚用于复位,不使用SYNC引脚而直接发送SYNC命令。AD1256的采样率由DRDY引脚控制,实测当配置为1khz采样率时,DRDY引脚每1ms发送一次脉冲信号;另外记录一段很好用的Systick定时器延时代码,抄的安富莱,大佬太强了,用了这个再也不会卡进HAL_GET_TICK了。⑤当读出数据不正确时考虑时序,SCL的高低电平是否有最小值
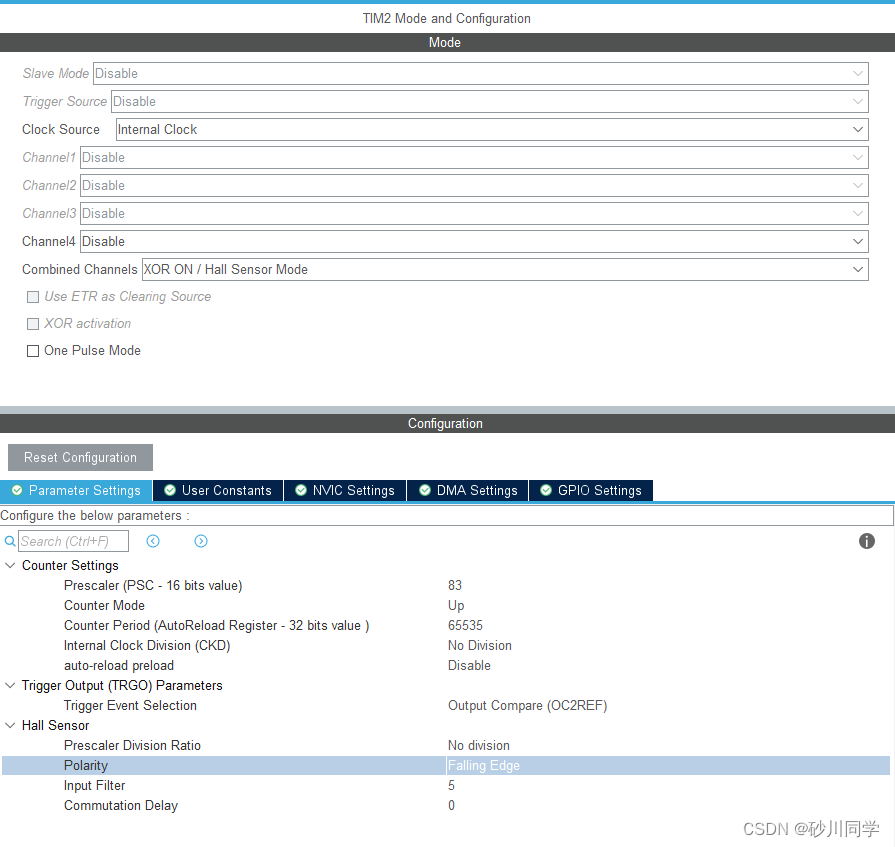
采用最简单的两线模式,不使用RU/RD,二级调制模式,SD1/SD2/SD3全部拉低,P0-P3不用配置没什么影响,PDC脚必须拉低在CubeMX中配置如下。
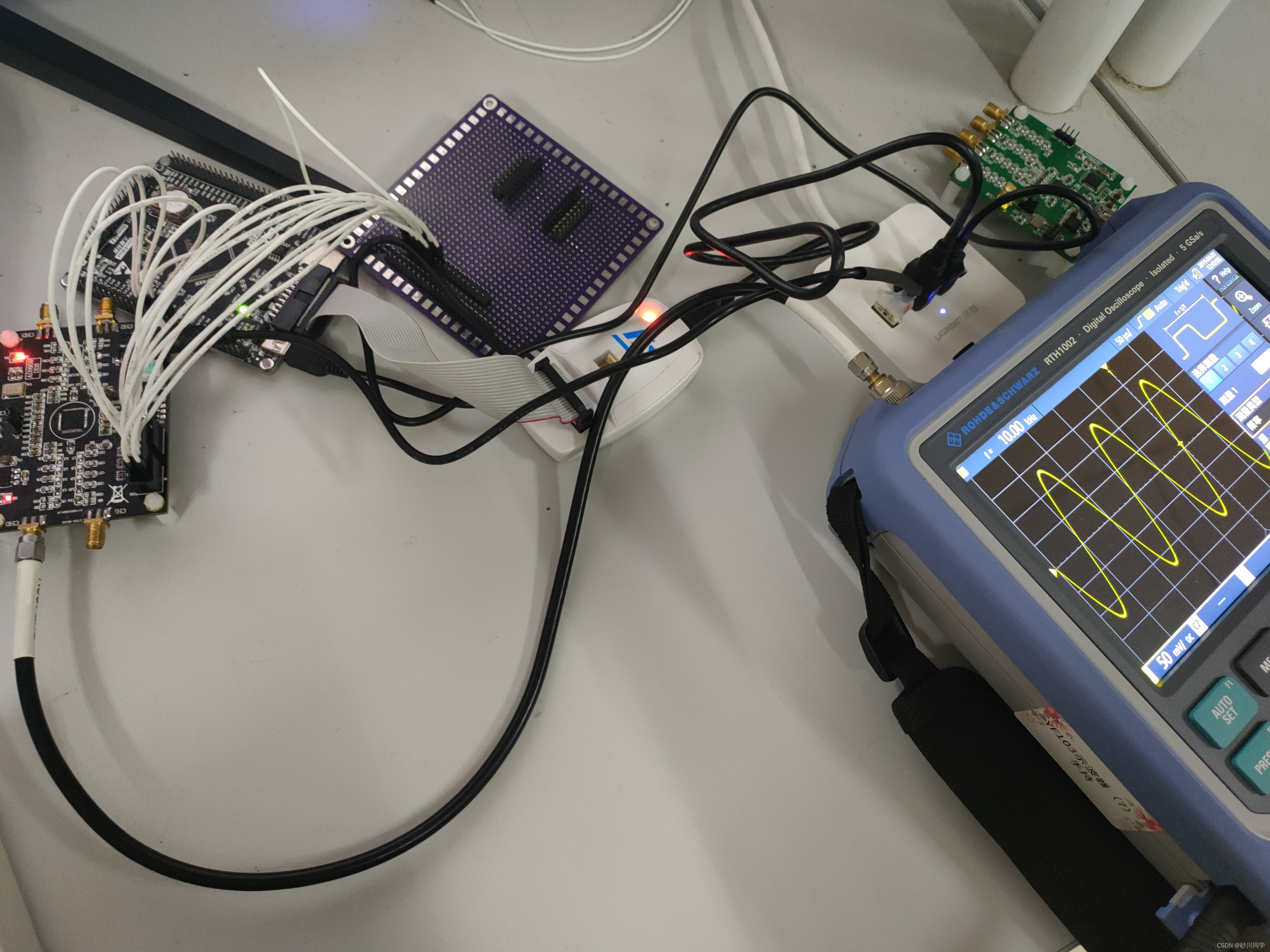
FOC开环控制主要分为三步:第一,角度自增;第二,Park逆变换;第三,SVPWM计算出下个周期要写入的占空比Ta,Tb,Tc验证SVPWM模块也非常简单,串口打印出来应该是个比较标准的马鞍波(我是20k频率,可供参考)如果角度改变太快会造成波形有不同程度的失真,不过是正常现象,角度变化改小点就可以了。