
写文章




- @weixin_52554174
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
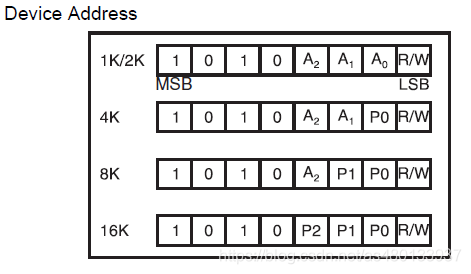
智能车模块详解——数据存储与读写(eeprom/flash)
讲解数据读写函数,以及数据存储
智能车入门——编码器
编码器是一种传感器,用于测量轴的旋转、转动或线性运动,并将其转换为数字信号。它通常由一个光栅盘和一个光电传感器组成,光栅盘上带有刻度线或孔,通过光电传感器检测这些刻度线或孔的变化,从而测量位置和运动。
到底了