- @weixin_50127894
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
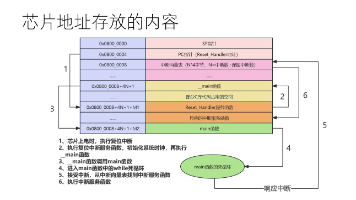
摘要: ARM芯片启动时根据BOOT模式选择启动位置(如主闪存0x08000000),硬件自动将对应地址映射到0x00000000并初始化SP指针。启动流程包括:1)通过中断向量表跳转;2)初始化栈空间(.map文件定义位置);3)执行SystemInit配置时钟;4)__main函数初始化.data/.bss段和堆栈,最后跳转用户main。关键点:启动地址映射由硬件完成,SP位置由连接器根据分散
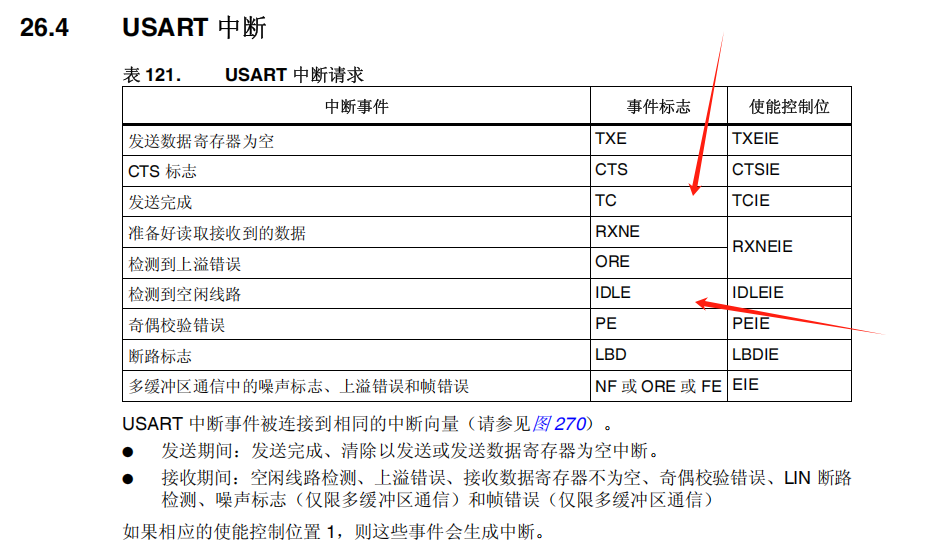
本文摘要:串口中断触发除了常见的TXE/RXNE标志位外,还介绍了TC(传输完成)和IDLE(总线空闲)两个特殊标志位。其中IDLE标志需要同时读取SR和DR寄存器才能清除。另外关于DMA中断,指出手动禁用DMA会立即触发TCIF标志,但若不先清除该标志位则无法重新启动DMA,强调在配置DMA后启动前必须清除标志位的注意事项。文章提供了两种可行的清除方式供选择。
嵌入式开发文档“全家桶”分类对比
SysTick:系统定时器,和普通定时器类似,它也可以定时,但是却是有特殊用途。它有24bits,定时器最大数值是2^24,并且计数时是向下递减计数,每次递减1,递减一次的时间是1/SYSCLK,一般来说SYSCLK为72MHz。当寄存器中的值减少到0时,会产生一个中断信号,进而执行相应的中断服务函数。
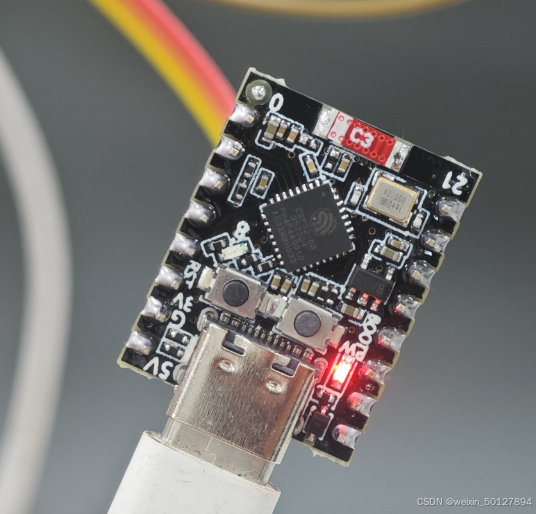
记录下日常接线,这里串口3对应的是COM18接口,串口1对应的是COM19接口,串口0对应的是COM20接口,串口2对应的是COM21接口。我使用的是逻辑分析仪,他可以同时作为USB转TTL模块使用。
c文件预处理生成.i文件.i文件编译生成.s文件.s文件汇编生成.o文件.o文件链接生成 .axf文件最后使用fromelf或类似工具生成 .bin文件(纯二进制文件)这个流程适用于嵌入式开发环境,特别是使用 Keil 的 ARM 开发板。

选择这个下载,下载好后解压固件包,里面有中文的使用手册,下面是硬件连接图,我们通过usb数据线下载固件,然后通过下面的串口模块给芯片发送命令,进行启动。接下来我们打开串口工具,这里你开始发是没反应的,我们需要再摁一下reset摁键,将芯片启动,就会返回第一个ready,记得打开加回车换行。注意:接入USB接口前需要一直摁着BOOT摁键,在接入电脑,不然会一直弹出无法连接到电脑。固件我们直接搜索谷歌
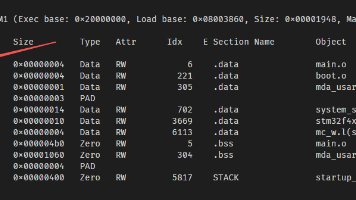
本文详细解析了Cortex-M系列单片机的内存分配机制和程序执行原理。首先介绍了Flash和SRAM中的典型内存段分配,包括.text、.rodata、.data、.bss等段,并指出实际内存分布与常规认知的差异。重点分析了map文件中的关键信息,特别是映像符号表和内存分布图的区别:符号表中函数地址显示为奇数(Thumb状态标志),而实际物理存储地址为偶数。文章深入探讨了ARM架构中Thumb指令
本文详细解析了Cortex-M系列单片机的内存分配机制和程序执行原理。首先介绍了Flash和SRAM中的典型内存段分配,包括.text、.rodata、.data、.bss等段,并指出实际内存分布与常规认知的差异。重点分析了map文件中的关键信息,特别是映像符号表和内存分布图的区别:符号表中函数地址显示为奇数(Thumb状态标志),而实际物理存储地址为偶数。文章深入探讨了ARM架构中Thumb指令
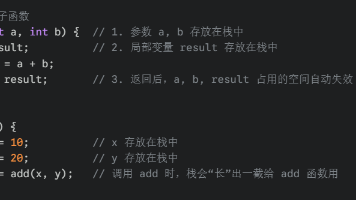
本文系统阐述了堆与栈在存储空间中的核心差异与应用场景。栈作为"临时工位"采用自动管理,遵循LIFO原则,存放函数调用的临时数据;堆作为"仓库"需要手动管理,适合存储大容量或动态数据。在裸机环境下,堆栈大小通过启动文件静态配置,所有函数共用单一栈空间;而在RTOS中采用双栈机制(MSP/PSP),任务栈从系统堆分配,通过内存合并算法有效减少碎片。文章通过生动比