
写文章




- @weixin_48457982
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
SCARA机器人RRRP-正运动学MDH
采用MDH参数法建立运动学坐标系模型,采用该方法建立如图机械臂坐标系模型,得到如表所示的MDH参数表。

晶圆搬运机器人PRRR-正运动学MDH
晶圆搬运机器人为四自由度PRRR型。

MATLAB安装机器人工具箱(Robotics Toolbox for MATLAB, RTB)三种方法
MATLAB安装机器人工具箱(Robotics Toolbox for MATLAB, RTB)三种方法

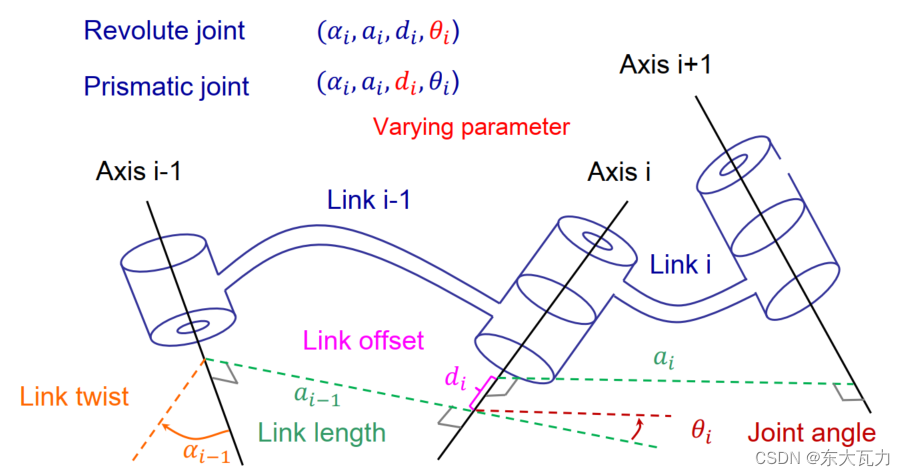
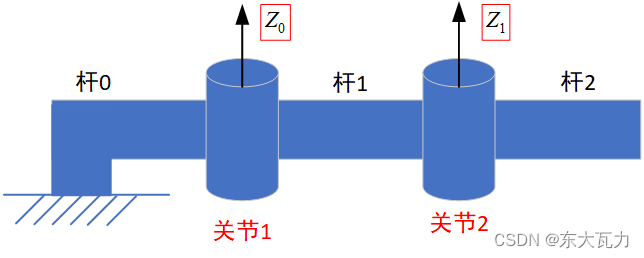
机器人学导论-运动学(1)
把机械臂关节变量作为自变量,描述机械臂末端执行器的位置和姿态与机械臂基座之间的函数关系(本章只研究机械臂连杆的位置和姿态)
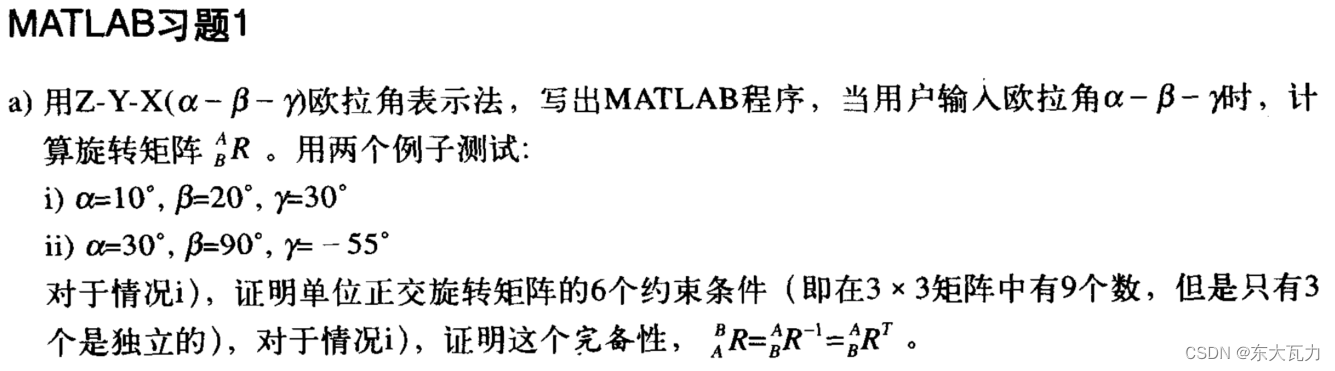
机器人学导论-第二章MATLAB练习答案
【代码】机器人学导论-第二章MATLAB练习答案。
机器人学导论-SDH与MDH的区别
John J. Craig主编的机器人学导论一书中所用的建模方法为MDH,切勿搞混,否则会让刚迈入门槛的你瞬间自闭,别留言问我是怎么知道的。:DH参数表是唯一的么?DH参数表不是唯一的。因为各个连杆坐标系的建立不是唯一的,导致DH参数不同;若机器人基坐标系与末端工具坐标系一致,则最终计算得到末端工具坐标系到机器人基坐标系下的齐次变换矩阵是唯一的。SDH-Standard DH-标准DHMDH-Mo
到底了