- @weixin_48113312
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
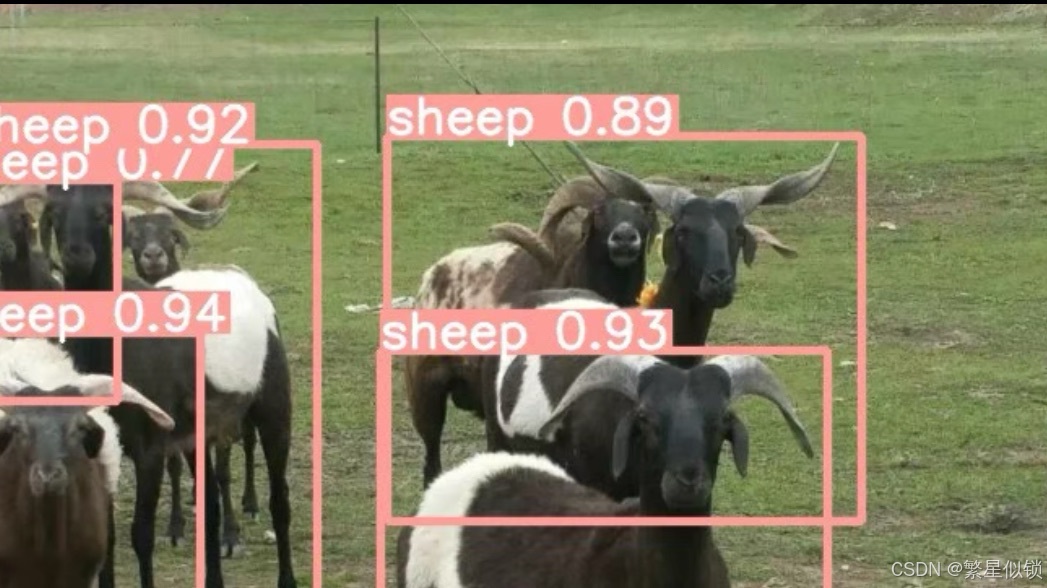
可直接进行YOLOv5、YOLOv6、YOLOn7、YOLOv8使用。数据集拥有3个类别、总计2400张图片。已经划分为训练集、验证集、测试集。YOLOv8检测结果请看下图。草原牛羊马目标检测数据集。支持YOLO、VOC格式。
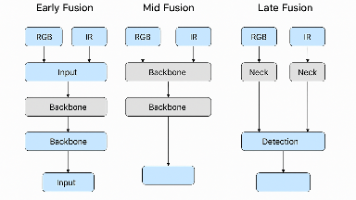
本文提出YOLO11-MM多模态目标检测网络,通过融合RGB与红外(IR)图像提升复杂环境下的检测性能。系统分析了Early、Mid、Late三种融合方式的优缺点,采用以中期融合为主的设计思路。网络包含模态特定Stem、多尺度MM-FusionBlock模块和共享检测头,实现自适应特征融合。实验表明该方法在夜间、雨雾等场景下显著提升检测精度,同时保持较高推理速度。文章详细介绍了网络结构、训练策略和
大小:1920×1080像素 or 1280×720,共3322张图片。4类水泥道路病害检测数据集,拥有3329张图片。支持YOLO目标检测格式,可直接使用。

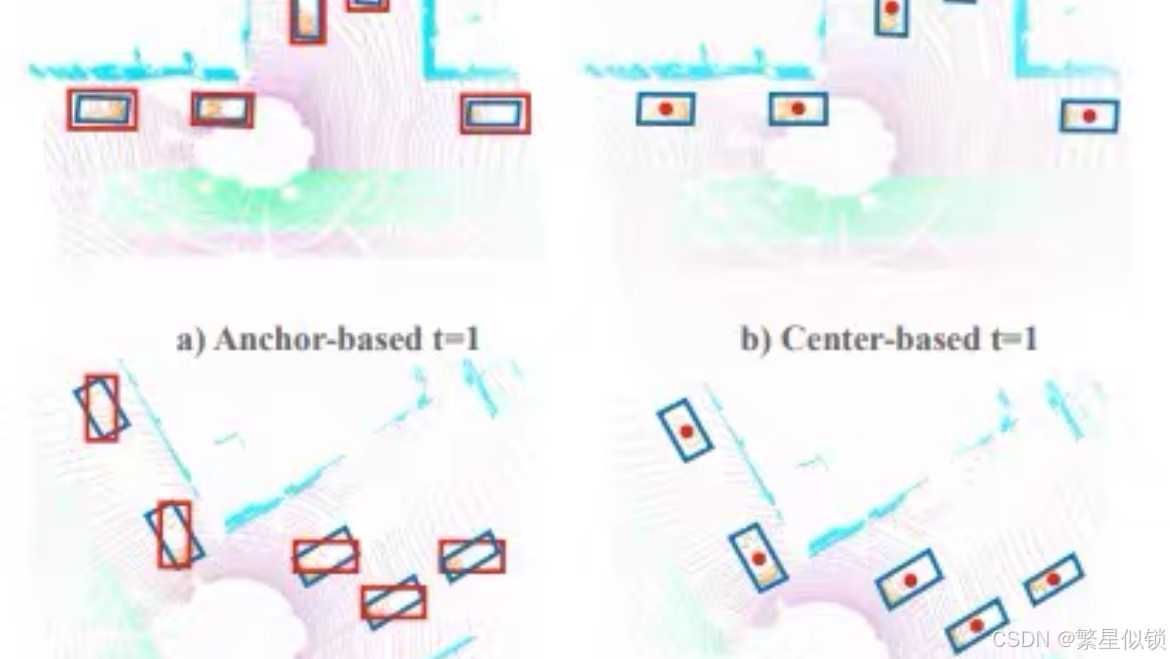
CenterPoint在LiDAR目标检测模型改进创新:通过提出的需求,对数据集进行整体评估分析,并进行相关模型结构改进和提升mAP精度,拥有Backbone,Neck,Head,Loss等相关改进,CenterPoint在LiDAR目标检测环境配置:Windows、Ubuntu、Centos、Macos等系统环境,如果电脑拥有显卡,可配置GPU版本的CenterPoint在LiDAR环境。Cen
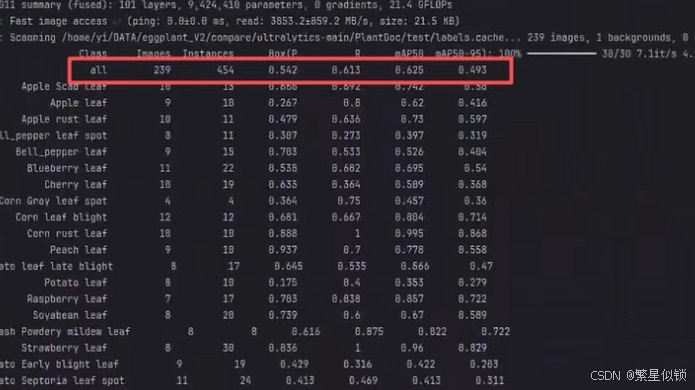
相关YOLOv11/YOLOv12/YOLOv13/YOLO26/YOLOv8模型可直接使用。P是0.542、R是0.613、Map50是0.625、mAP50-95是0.493。如有需要,可直接拍,同时YOLOv11s模型训练300个epoch后测试结果如下。共计图像是2766张,其中训练集是2328张,测试集:239张。同时本人也可以修改目标检测模型并且创新涨点,以此发表paper。数据集可直
CoatNet(cnn与transformer高度结合,提出c-c-T-T高效架构)[3]支持损失函数loss修改等服务diou、 siou 、gussion iou。mobileVit(mobilenet与transformer高度结合)5、隐式知识推理、正负样本标签匹配simOTA,ATSS等。4、检测头添加(3个调整为4个、4个调整为5个等)[1]主干网络替换轻量化设计。结构重参数化的rep

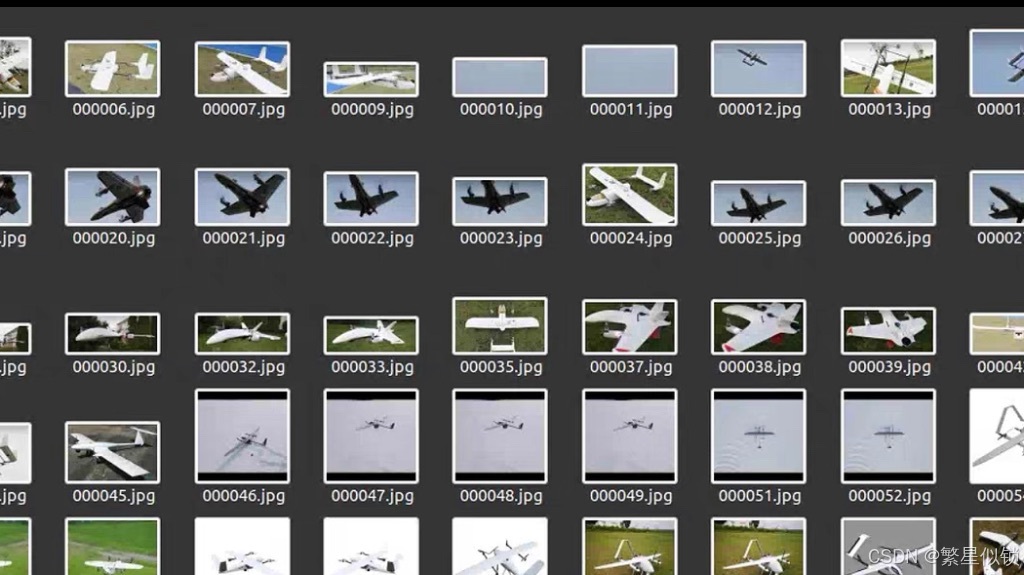
相关YOLOv8/YOLOv9/YOLOv10/YOLOv11/yolo12/RTDETR模型可直接使用。P是0.826、R是0.758、mAP50是0.822、mAP50-95是0.606。训练集图片8059张,验证集2302张、测试集1153张。数据集可直接使用,未做任何数据增强等预处理。数据集可直接使用,未做任何数据增强等预处理。共计图片11514张,数据集是txt格式。6类无人机目标检测数
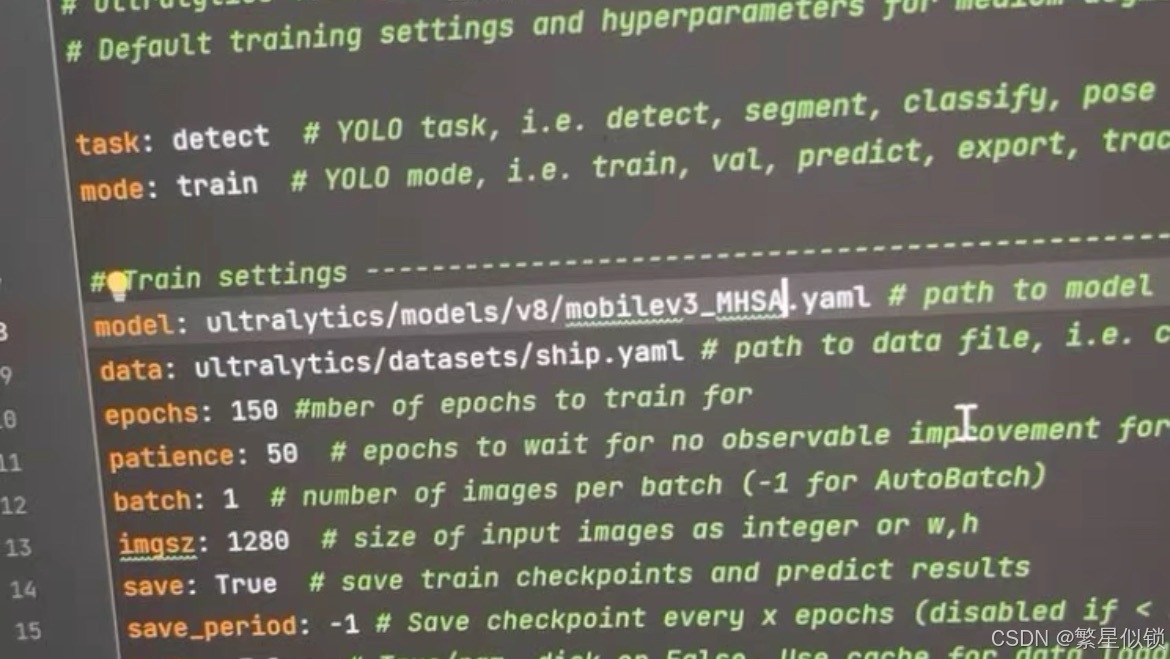
yolov8 mobilev3轻量级 注意力机制。感兴趣的话点“我想要”和我私聊吧~
包含3个类别,分别是insulator(绝缘子), insulator-defect01(自爆),insulator-defect02(破损)其中YOLOv5S检测mAP50是0.792,mAP50-95是0.507。相关YOLOv5/YOLOv6/YOLOv7/YOLOv8模型可直接使用。该数据集为原始数据集,未经图像预处理操作,数据集已划分为训练集/验证集/测试集。私人自建电力线绝缘子目标检测

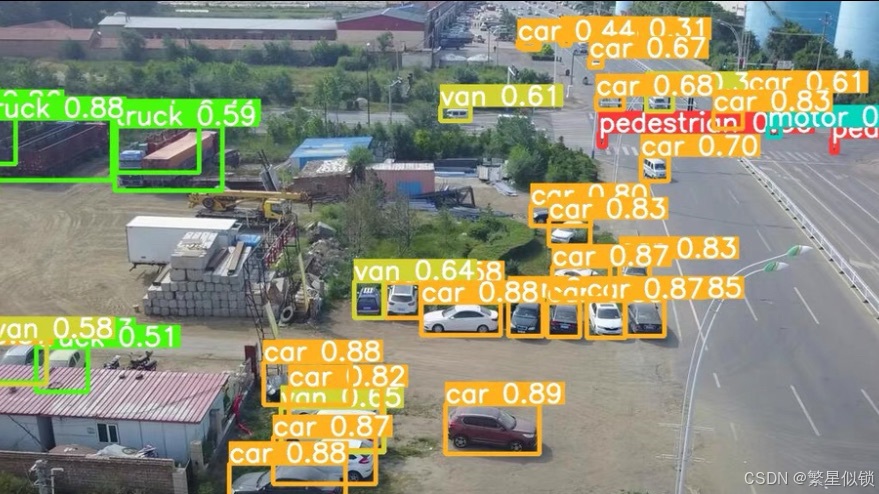
YOLOv8训练Visidron小目标检测数据集。YOLO训练结果模型➕数据集。