- @weixin_45534376
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
本文主要参考Probabilistic Robotics《概率机器人》一书。
本文主要整理各种主流路径搜索算法的帖子。

XTDrone中相机配置文件与indoor1.launch中的/iris_0/mavros/local_position/pose不相符,可改为iris_realsense_camera。XTDrone中VINS-FUSION代码直接来自VINS-FUSION官网,在Ubuntu20.04中编译会碰到很到问题,参考下面连接进行VINS-FUSION源代码的修改。1.13版本的参数修改需要修改编译后
本文上接Fast-Planner的B-spline曲线生成详解,介绍B-spline曲线优化。如有问题,欢迎各位大佬评论指出,带着我一起进步。
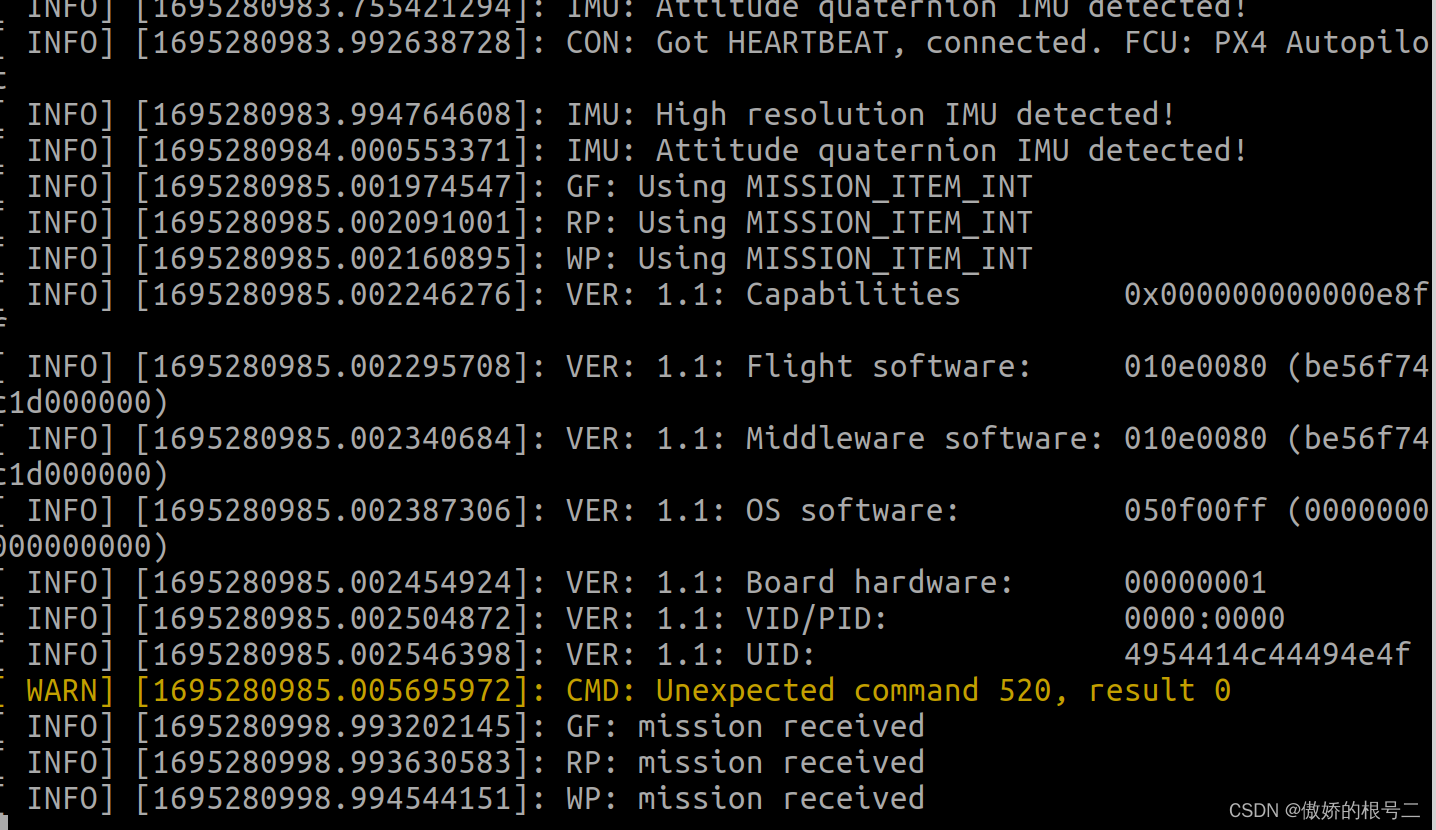
下载源码进入PX4-Autopilot文件夹,继续下载未下载的组件执行Ubuntun.sh脚本出现python部分包的版本问题再执行测试进入PX4-Autopilot文件夹内添加到环境变量。
掌握了标准库,最近在搞stm32的HAL库,在自己编写任务时,出现了error: #20: identifier “HAL_StatusTypeDef” is undefined的问题,通过查找定义是可以找到HAL_StatusTypeDef的位置,但是依旧报错。解决办法:通过了解得知在HAL库中的stm32f1xx_hal_conf.h的头文件中对一些头文件做了使能,另一部分头文件是处于注释状态
本系列笔记主要为笔者对轨迹规划的基础理论归纳整理,方便学习,如有问题,望各位大佬指出。
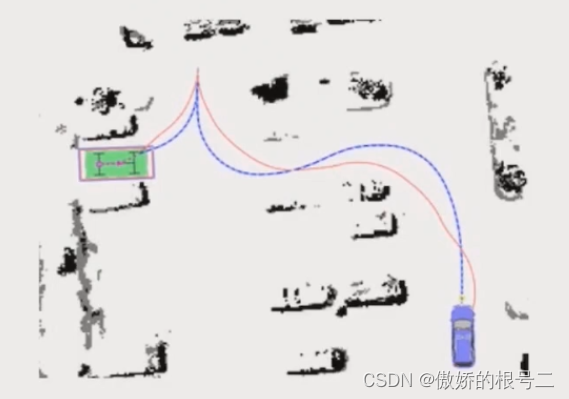
作为无人机自主运动的入门路径规划算法,详细表述了路径规划的前端和后端,前端为路径搜索,后端未路径优化。具体参考。
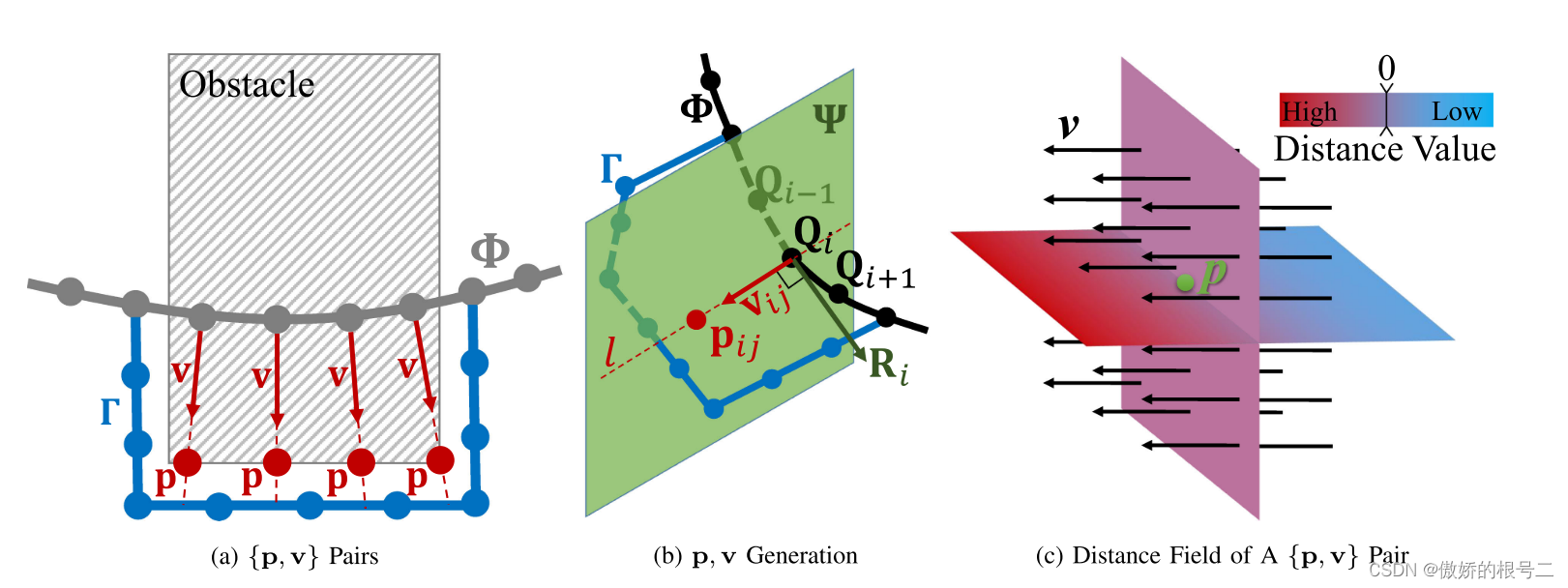
本系列文章主要解析浙大高飞老师FAST-Lab团队的文章EGO-Planner,该算法作为现在无人机的主流轨迹规划算法值得详细解读,笔者利用自己有限的理解力做一个笔记摘录,若有问题请各位大佬评论区指正。本文主要解析论文部分。