
写文章




- @weixin_45371818
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
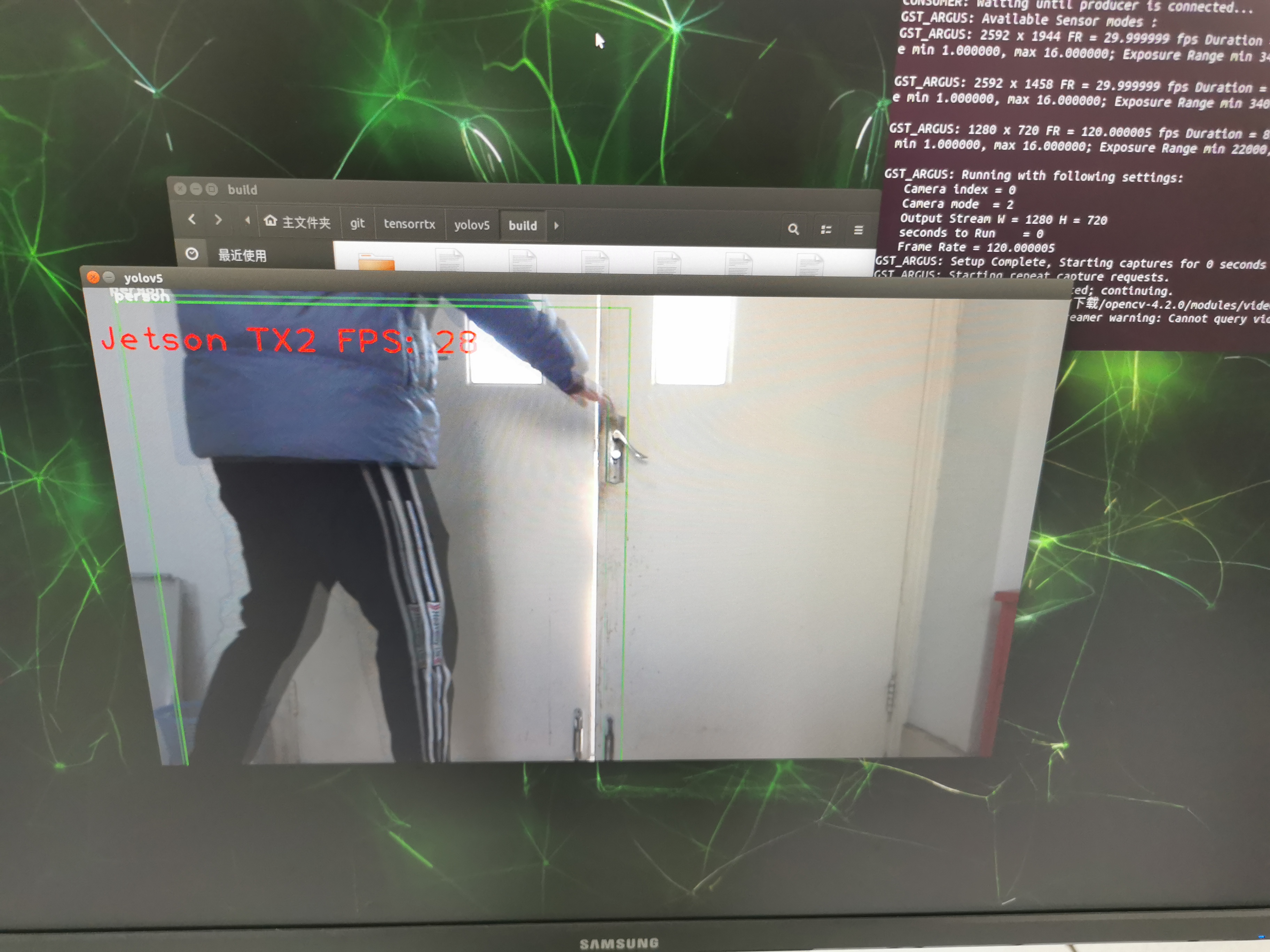
TX2+调用板载摄像头实时目标检测(yolov5)+tensorrt
前言首先感谢無證騎士博主的大力支持,本文的也是根据他的文章魔改。因项目需求,在TX2上部署yolov5算法实时检测目标。之前在ubantu上做过yolov5的图片检测,实时检测与之类似,但也是耗费一周的时间,原谅我是个小白。一、环境安装附上無證騎士博主的博客地址:https://blog.csdn.net/hahasl555/article/details/116500763二、opencv的安装
Depth from Camera Motion and Object Detection
1 摘要本文旨在解决在考虑相机运动情况下的物体深度估计问题。使用DBox网络和ODMD数据集来估计深度信息。2 简介目前的自动驾驶车辆和机器人需要感知周围环境的三维信息,这需要依赖RGBD摄像头和雷达传感器。本文主要使用未标定相机运动和物体检测的边框来估计深度。优势之一是物体检测边框只有四个参数,相比于图像分割可以节约算力;优势之二是运动信息可以在大多数硬件平台上测量。创新点:一、推导出未校准运动
到底了