- @weixin_44229927
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
从零开始的OMPL库算法学习(2)RRT-connect算法来用C++写一个RRT算法求自主规划的最短路径RRT、RRTconnect和RRTstar路径规划简易matlab代码路径规划算法:RRT,RRT*,B-RRT*算法 - 附代码
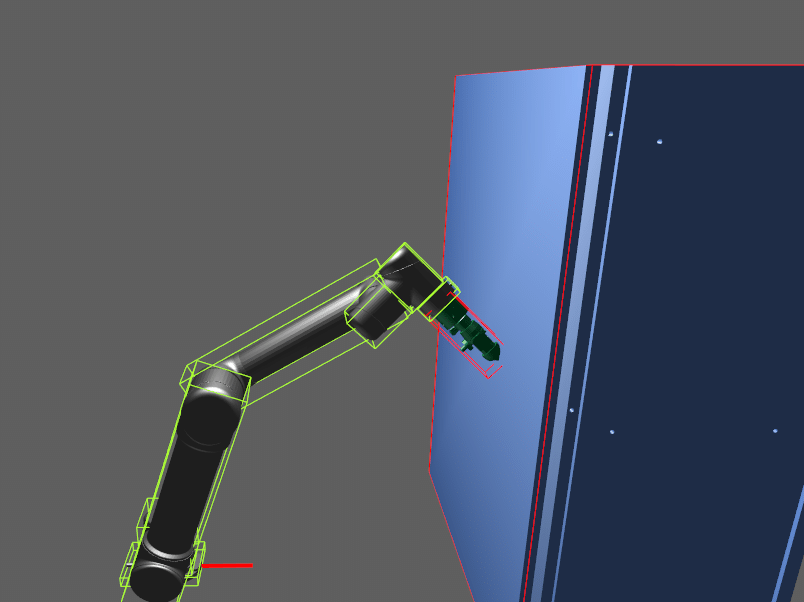
碰撞检测机器人碰撞检测可以大致分为两类:发生碰撞后,通过检测电流、力矩或者编码器的值来判断碰撞的发生;发生碰撞前,通过建模判断机器人发生碰撞。一般地,第一种方法通常用于环境不确定的环境,如人机交互安全检测;而第二种方式通常用于已知环境内的轨迹规划时(ROS-moveit),是一种预碰撞的检测。其中Moveit中使用的就是第二种方法,首先使用AABB包围盒对机器人各个连杆进行建模,然后进行大致的碰撞
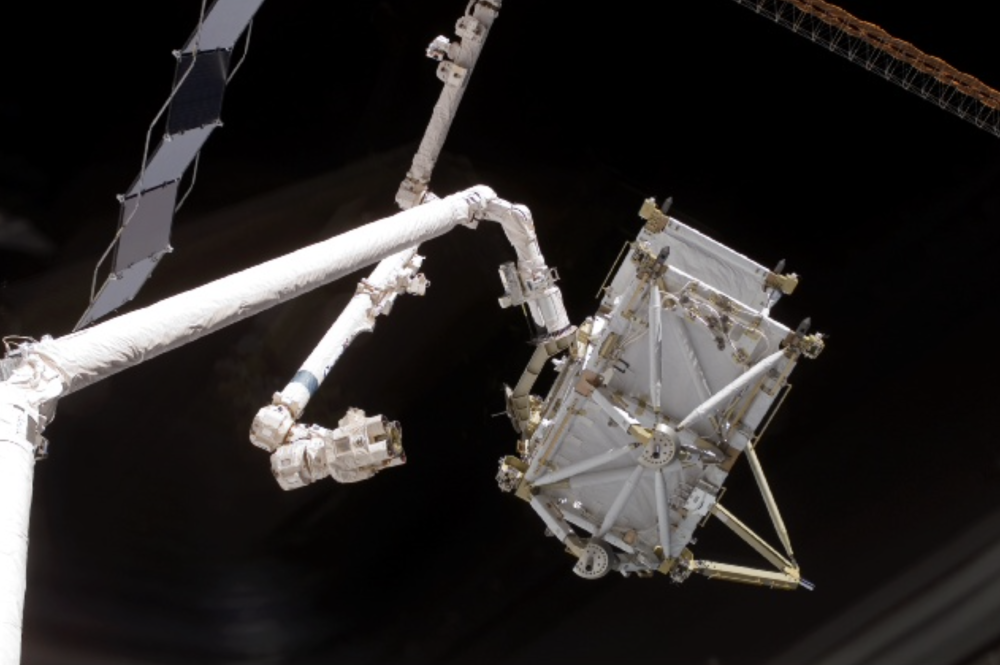
中国空间站拥有自己的机械臂,真的十分振奋人心,可以看视频->高清展示真实中国机械臂爬行状态。由于没有中国空间站机械臂的参数,这里使用加拿大的Candarm2进行运动学仿真分析试手以抑制激动的心。????其DH参数如下:由于空间站机械臂的结构为七自由度,且构型特殊,所以没有解析解,这里使用数值解进行逆解计算,模拟空间站机械臂“抓取”物体。抓取当然,空间站机械臂最重要的还是动力学,保证空间站在空
四元数在机器人中的应用欧拉角欧拉角的奇异性欧拉角万向节死锁四元数欧拉角欧拉角的奇异性欧拉角的奇异性实际上就是在从旋转矩阵逆解旋转角度过程中,由于三角函数的性质导致出现退化解的现象,详细见《机器人学建模、规划与控制》西西里安诺 P36其中需要注意公式 (2.23)第二个式子符号有误。欧拉角万向节死锁例子正在研究中。四元数理论部分的解释见豆瓣. 其中的链接用safari或谷歌打开比较快。电子书谷歌可以
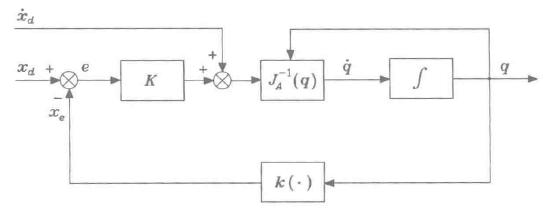
一种机器人的控制方法——闭环偏差补偿法