
写文章




- @weixin_43833005
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
论文理解《PETRv2: A Unified Framework for 3D Perception from Multi-Camera Images》
PETRv2 在 PETR 的基础上,探索了时间建模的有效性,利用前几帧的时间信息来增强 3D 目标检测。主要贡献有2点:扩展了 PETR 中的 3D position embedding(3D PE)用于时序建模,实现了不同帧间目标位置的时间对齐。引入了特征引导(feature-guided)的位置编码器,以提高 3D PE 的数据适应性。
MIT-BEVFusion模型---Lidar-Camera外参标定--target based
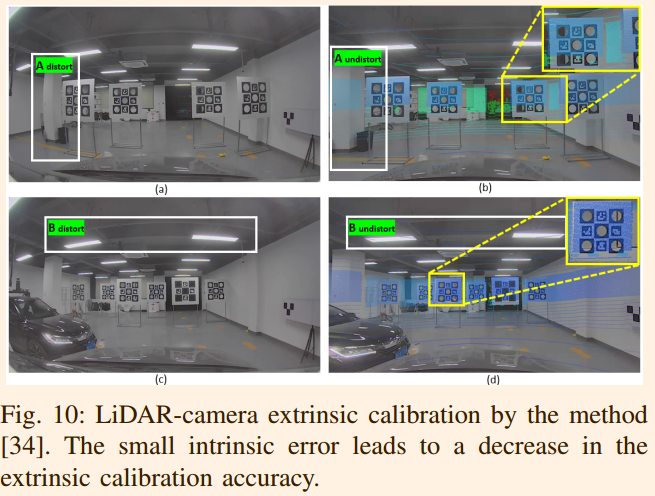
对于激光雷达与相机的标定,现有的方法一般是先标定相机的本征参数,然后再标定激光雷达和相机的外参参数。如果在标定的第一步没有正确标定好相机的本征参数,则很难对激光雷达-相机的外参参数进行准确的标定。由于相机内部结构复杂,且目前缺乏有效的相机本征参数标定的量化评价方法,在实际标定中,外参参数标定的精度往往会因相机本征参数的微小误差而降低。如下图所示。针对现有方法的问题,作者提出了一种基于目标的相机内参
到底了