- @weixin_41628708
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
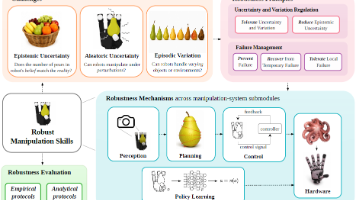
本文介绍了机器人提升操作鲁棒性的三大挑战、两大原则、五个模块,供从事机器人领域的大朋友和小朋友们一起参考。
本文总结了MoveIt在不同规划模式下的速度控制方法,尤其是对笛卡尔运动规划的速度控制给出了多种方法,在实际情况下可以根据便捷性和扩展性采用最合适的速度控制方法。

机器人掌握对柔性物体的操作能力是机器人(尤其服务机器人)进入人类社会必要的一环。本文总结了近年来柔性物体(如布料)的综述文章以及基准研究。所有文章按照出版时间进行排序。

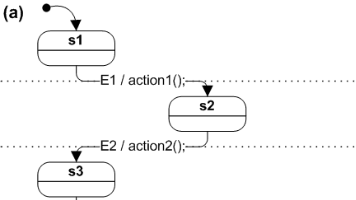
本文系统梳理了状态机的核心术语与概念框架,重点推荐了权威的官方学习资源,并通过生动的鞋子打包实例,直观展示了状态机的实际应用场景。
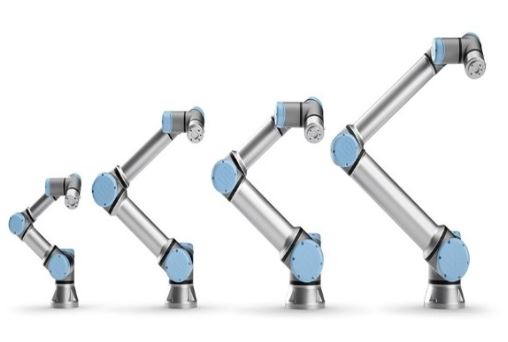
本文在官方Github教程的基础上,详细阐述了UR机械臂的ROS驱动安装和配置,并进行了一定的扩展,供广大机器人相关人员参考。
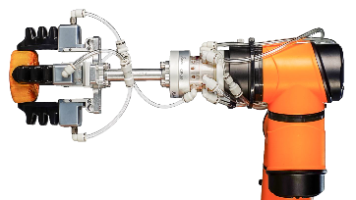
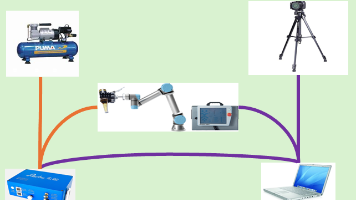
本文介绍了机器人抓取的流程和具体实施过程,主要包括物体的定位、位姿估计、坐标系转换、抓取系统硬件与抓取实施。
具身智能(Embodied Artificial Intelligence,简称 EAI)将人工智能融入机器人等物理实体,赋予它们感知、学习和与环境动态交互的能力。本文简要回顾了 EAI 的历史、当前发展以及未来展望。

本文围绕数据采集和数据标注两个话题展开,首先介绍了数据采集的方法、要求和案例代码,然后介绍了数据标注的类型、格式、工具、规则,最后延伸到自动标注的方法和步骤。

本文概述了机器人系统中的数据提取,处理与绘制的整个流程,具体的目标是获取机械臂抓取过程中末端位姿和接触力的同步变化数据。

本文主要讲解了夹爪的选型和通讯控制。首先介绍了如何根据任务需求对夹进行选型,其次以柔触夹爪为例,讲解了其控制方式和ROS通讯控制方法,为类似的夹爪选型和通讯任务提供参考。