- @weixin_41235419
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
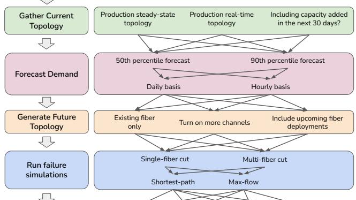
本文介绍了Confucius框架,这是一个基于多智能体大语言模型(LLMs)的网络管理系统。该框架将网络管理工作流建模为有向无环图(DAGs),通过集成LLMs与现有管理工具实现自动化操作,采用检索增强生成(RAG)技术优化记忆管理,并建立人机交互原语。Confucius特别注重与网络验证方法的结合,确保关键操作的正确性。作为首个应用于超大规模网络的多智能体LLM框架,Confucius已在生产环
本报告旨在详细探讨基于星链的无人机类型及其在乌克兰战场中的具体应用,并提供关键数据和信息,以全面分析其军事影响。例如,人工智能驱动的无人机可能进一步增强自主性,而星链的全球覆盖将支持更广泛的远程操作。其应用涵盖了情报收集、火炮引导和精确打击等多领域。尽管存在争议和限制,星链仍被视为现代战争中的重要工具,其影响将继续塑造冲突的进程。这种技术特别适合无人机操作,解决了传统RF通信的范围和干扰问题,使无

物理信息神经网络(Physics-Informed Neural Networks,简称PINN)是一种将物理定律融入神经网络训练过程中的先进方法。与传统的神经网络不同,PINN不仅依赖于数据驱动的学习,还通过将偏微分方程(PDEs)等物理约束条件纳入损失函数,实现对物理现象的精准建模和预测。
在离散神经网络控制系统中,常采用梯度下降法实现神经网络权值的学习。一、基于RBF神经网络的监督控制基于RBF神经网络的监督控制:初始阶段采用PD反馈控制,然后过渡到神经网络控制。在控制过程中,如果出现较大的误差,则PD控制起主导作用,神经网络控制起调节作用。图1:基于RBF神经网络的监督控制系统框图总的控制输入为u(k)=un(k)+up(k)u(k) = u_n(k) + u_p(k)u(k)=
针对MIMO模型,常规控制器的设计方法一般要求建立最小相位系统的结构和精确的数学模型,在许多情况下模型参数还要求精确已知。神经网络可以通过前向或反向的动态行为在线学习复杂模型,通过适应环境的变化设计自适应MIMO控制器。从理论上讲,一个基于神经网络的控制系统的设计相对简单,因为它不要求有关该模型的任何先验知识。
在离散神经网络控制系统中,常采用梯度下降法实现神经网络权值的学习。一、基于RBF神经网络的监督控制基于RBF神经网络的监督控制:初始阶段采用PD反馈控制,然后过渡到神经网络控制。在控制过程中,如果出现较大的误差,则PD控制起主导作用,神经网络控制起调节作用。图1:基于RBF神经网络的监督控制系统框图总的控制输入为u(k)=un(k)+up(k)u(k) = u_n(k) + u_p(k)u(k)=
物理信息神经网络(Physics-Informed Neural Networks,简称PINN)是一种将物理定律融入神经网络训练过程中的先进方法。与传统的神经网络不同,PINN不仅依赖于数据驱动的学习,还通过将偏微分方程(PDEs)等物理约束条件纳入损失函数,实现对物理现象的精准建模和预测。
针对MIMO模型,常规控制器的设计方法一般要求建立最小相位系统的结构和精确的数学模型,在许多情况下模型参数还要求精确已知。神经网络可以通过前向或反向的动态行为在线学习复杂模型,通过适应环境的变化设计自适应MIMO控制器。从理论上讲,一个基于神经网络的控制系统的设计相对简单,因为它不要求有关该模型的任何先验知识。
在多体动力学和机器人控制中,我们经常面临一个头疼的问题:已知物体在惯性系下的运动,以及观察者(动系)本身的疯狂运动(平动+转动+角加速),如何求出物体相对于观察者的运动?本文将通过一个经典的矢量运算案例,带你手推“点的合成运动”逆运算,并附上 Python 验证代码。

对数函数在数学和计算机科学中扮演着重要的角色,从科学计算到数据分析,无所不包。那么,计算机在底层是如何高效且准确地计算对数函数的呢?本文将从基础原理出发,详细解析计算机计算对数函数的过程,以理解其背后的机制。