




- @u011727577
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
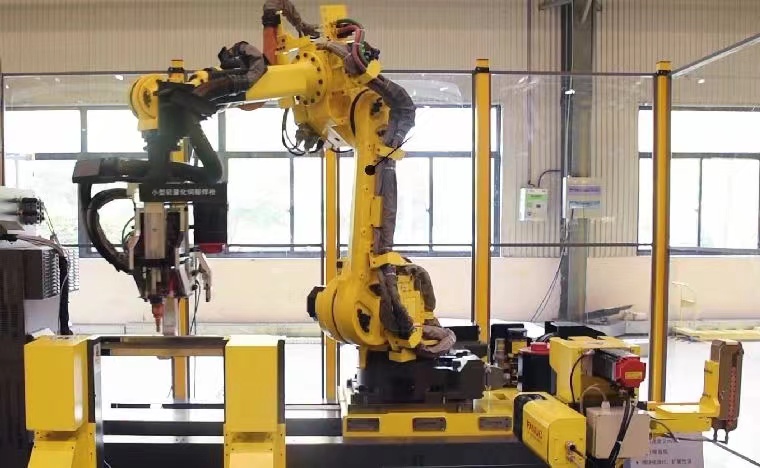
更多机器人技术分享可关注公众号:A自动化项目实战目录准备工具检查硬件、软件配置附加轴参数伺服焊枪设置伺服焊枪压力标定电极头磨损测量初始设置电极头修磨参数设置设定TCP设置负载1准备工具小容量U盘(首先做好镜像备份和全备份,用于故障恢复)卡尺(测量焊枪开口大小实际数值);压力测定仪器(焊枪压力标定,需要2人互相配合进行);纸、笔(记录焊枪压力数值);2检查焊枪硬件和软件2.1检查硬件地脚螺栓是否固定
KUKA 机器人仿真软件OfficeLite

写在前面KUKA机器人软件包及备份,有需要关注微信公众号“A自动化项目实战”。
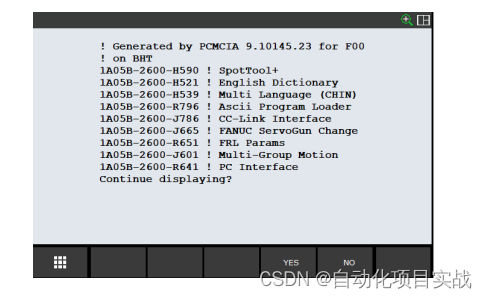
故障表前言:很久没给大家分享文章了,今天给大家分享的FANUC机器人调试时必会遇到的故障代码,SRV0-062 与 SRV0-075,具体接触步骤如下:解除报警和准备零点标定显示报警“Servo 062BZAL报警”或“Servo075脉冲编码器位置未确定"步骤按照下面(1)~(6)的步骤显示位置调整菜单1)按下MENU(菜单)键。2)按下“0下页”,选择“6 系统”3)按下F1“类型”,从菜单选
写在前面KUKA机器人软件包及备份,有需要关注微信公众号“A自动化项目实战”。
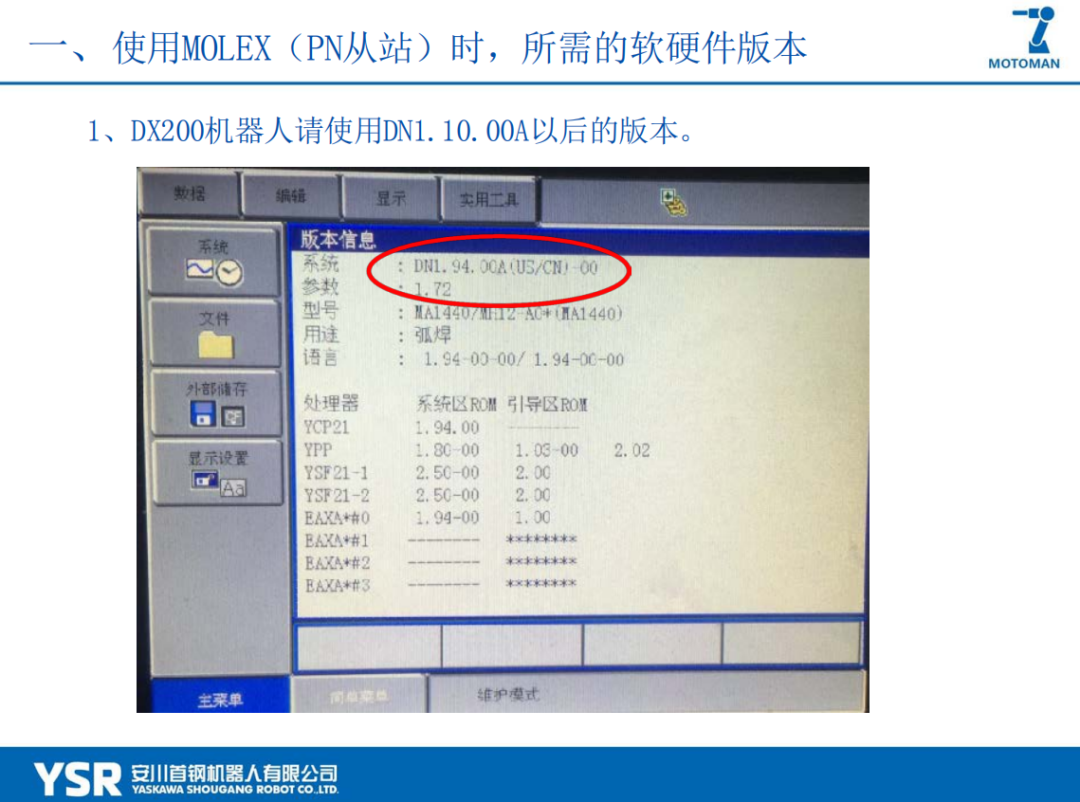
写在前面共62页,完整安川机器人PROFINET 配置流程,有需要完整查阅的请关注公众号:“A自动化项目实战”
故障表前言:很久没给大家分享文章了,今天给大家分享的FANUC机器人调试时必会遇到的故障代码,SRV0-062 与 SRV0-075,具体接触步骤如下:解除报警和准备零点标定显示报警“Servo 062BZAL报警”或“Servo075脉冲编码器位置未确定"步骤按照下面(1)~(6)的步骤显示位置调整菜单1)按下MENU(菜单)键。2)按下“0下页”,选择“6 系统”3)按下F1“类型”,从菜单选