- @tww960106
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
产生方法是首先根据各种航迹的运动方程产生直角坐标系下的轨迹,其中8字航迹和椭圆航迹分别调用了函数EightTrack和EllipseTrack来产生,然后利用坐标系转换,将直角坐标系的值转换为极坐标系的值,即距离、方位角、俯仰角,值得注意的是,转换过程中要考虑象限问题,当方位角处于二三象限时,方位角需加上一个,这样得到的是目标在极坐标系下的真实值,然后加上高斯白噪声,噪声的方差由自己设定,即观测噪

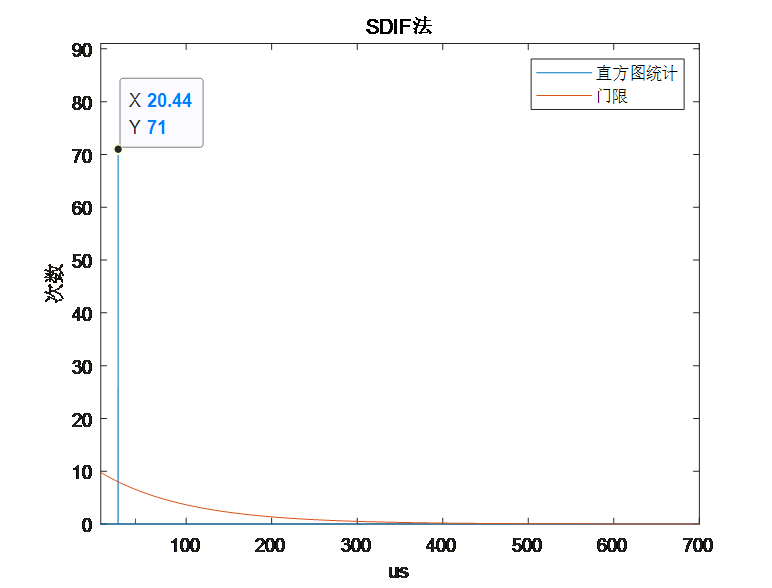
信号分选SDIF算法仿真matlabSDIF算法介绍SDIF算法仿真SDIF算法部分代码(完整联系QQ1059172468)SDIF算法介绍序列差直方图法(SDIF)是一种基于CDIF的改进算法。SDIF与CDIF的主要区别是:SDIF对不同阶的到达时间差直方图的统计结果不进行累积,其相应的检测门限也与CDIF不同。其基本思想如下:首选计算相邻两脉冲的TOA差构成第一级差直方图。如果差直方图中只有
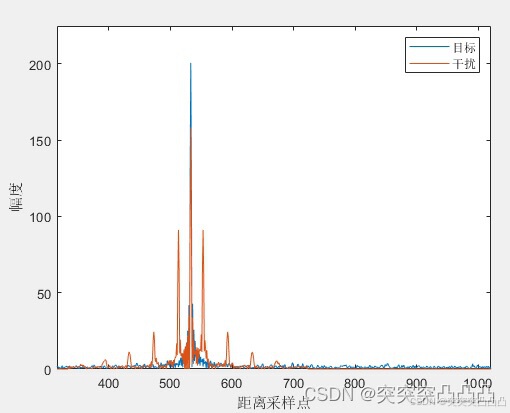
对各种干扰样式进行干扰效果仿真,其中加入目标,仿真其脉冲压缩结果。
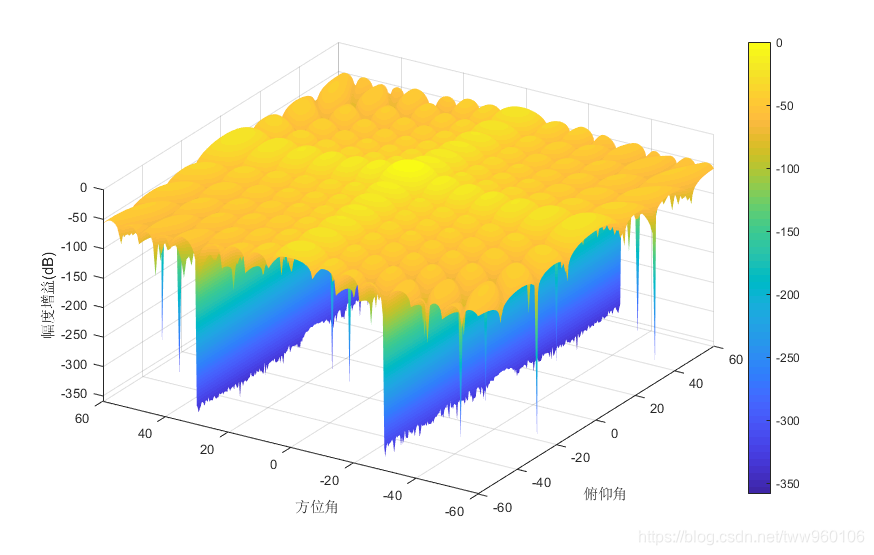
面阵天线方向图 圆阵天线方向图 圆环阵天线方向图 正六边形天线方向图 Matlab
从测角结果可以看出,基于FFT的和差幅度测角相较于常规和差幅度测角精度有所提升,同时128点滑窗FFT测角误差最小。以但散射点为例,用第i个散射点的差通道频谱分量比上和通道频谱分量,可以得到第i个散射点的角度测量公式如下。将差方向图函数展开成麦克劳林级数,用差通道信号比上和通道信号就可求得目标偏离天线轴线的角度,那么。分别表示第i个散射点距离观测雷达的初始径向距离,初始相对径向速度和相对径向加速度
雷达回波模拟仿真(三):杂波(以LFM为例)matlab杂波杂波类型杂波杂波类型就杂波来源而言,它包括来自地面、大海、云雨等天气、以及一些飞行的动物的回波。特殊的例如电离的流星尾迹回波或是被称为箔条所引起的回波,通常也被认为是杂波。从类型上来讲,杂波可以大体分为面杂波和体杂波两部分。其中,面杂波主要指地杂波和海杂波,通常用单位面积的杂波横截面积($$)...
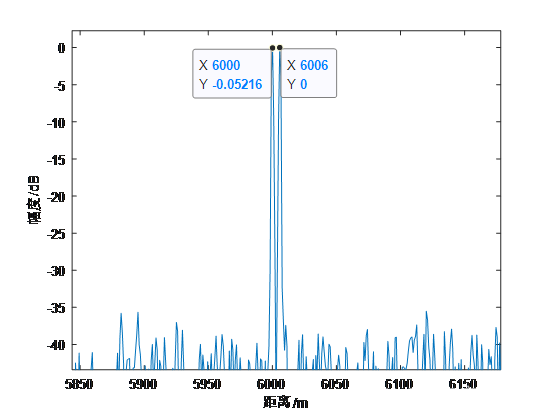
步进频率信号发射得的是一串窄带的相参脉冲,每个脉冲的载频之间是均匀线性步进的,经过相参本振对目标回波信号进行混频、采样,再对同距离门的采样值做逆傅里叶变换,就可以得到脉冲合同的结果。设步进频率信号的脉冲宽度为。(1)一组步进频脉冲信号时域。(2)一组步进频脉冲信号频率。系统采样率200MHz。
针对得到的脉冲流PDW进行信号分选,包括重频恒定、重频抖动、重频参差和重频滑变四种脉间调制类型。这里我们先进行数据的仿真,后续边仿真边分享思路:首先根据信号类型,分别产生重频恒定、重频抖动、重频参差和重频滑变共四部雷达,雷达参数如下DOA(角度):35°、45°、50°、20°;PRI (脉冲重复周期):100us、33.33us、20us、14.3us;PW(脉宽):4us、10us、2us、1
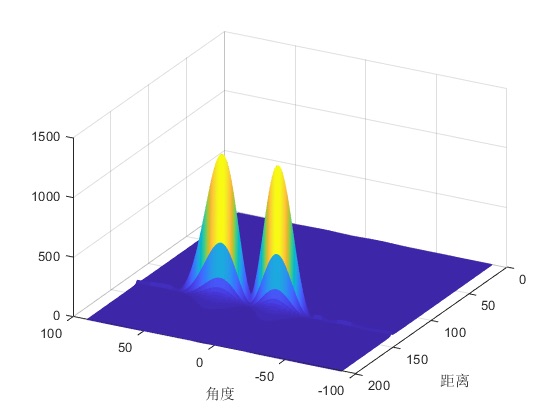
雷达测角方法(DBF测角、干涉测角(长短基线))DBF测角实验仿真干涉测角长短基线相位差解模糊实验仿真(待更新)五元均匀圆阵干涉测角(待更新)代码私信DBF测角根据波束形成方式进行测角,原理不再赘述实验仿真信号采用LFM连续波,阵列为8阵元线阵,设置两个目标分别为-10°,30°,距离100,速度为0仿真结果(1)距离-角度三维图(2)距离-角度俯视图干涉测角 干涉仪是对一类相位法测向设备的称呼
步进频率信号发射得的是一串窄带的相参脉冲,每个脉冲的载频之间是均匀线性步进的,经过相参本振对目标回波信号进行混频、采样,再对同距离门的采样值做逆傅里叶变换,就可以得到脉冲合同的结果。参数设置:载频10GHz,带宽10MHz,脉宽10us,步进频频率为5MHz,步进次数为32,采样率为50MHz,设置两个目标,距离分别为6000和6003。从图中可以看出,不进行步进频高分辨处理时,只存在一个目标,根