- @shehaichao
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
本文介绍了如何在飞书平台上部署MimicLaw机器人的完整流程。主要内容包括:1)环境准备,需安装ESP-IDF并支持VSCode编译;2)获取DeepSeek API密钥并充值;3)在飞书开放平台创建机器人应用,配置事件订阅;4)注册Tavily API用于网页搜索;5)下载固件并修改配置文件中的WiFi、API密钥等信息;6)固件烧录步骤;7)最终实现飞书机器人对话功能。文章提供了详细的参数配
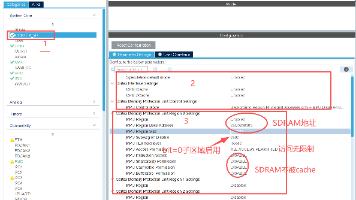
摘要:本文记录了STM32H723替换F429时遇到的HardFault问题及解决方案。主要差异包括主频提升、MPU/cache引入和多电源域设计。问题出现在SDRAM初始化阶段,通过调整时钟配置(480MHz主频下FMC工作于120MHz)、FMC-GPIO设置、SDRAM参数配置(适配W9825G6KH芯片)以及关键MPU配置(解除SDRAM地址保护)得以解决。文中引用CSDN相关教程,特别强
本文介绍了如何在飞书平台上部署MimicLaw机器人的完整流程。主要内容包括:1)环境准备,需安装ESP-IDF并支持VSCode编译;2)获取DeepSeek API密钥并充值;3)在飞书开放平台创建机器人应用,配置事件订阅;4)注册Tavily API用于网页搜索;5)下载固件并修改配置文件中的WiFi、API密钥等信息;6)固件烧录步骤;7)最终实现飞书机器人对话功能。文章提供了详细的参数配
摘要:本文记录了STM32H723替换F429时遇到的HardFault问题及解决方案。主要差异包括主频提升、MPU/cache引入和多电源域设计。问题出现在SDRAM初始化阶段,通过调整时钟配置(480MHz主频下FMC工作于120MHz)、FMC-GPIO设置、SDRAM参数配置(适配W9825G6KH芯片)以及关键MPU配置(解除SDRAM地址保护)得以解决。文中引用CSDN相关教程,特别强
本文介绍了如何在飞书平台上部署MimicLaw机器人的完整流程。主要内容包括:1)环境准备,需安装ESP-IDF并支持VSCode编译;2)获取DeepSeek API密钥并充值;3)在飞书开放平台创建机器人应用,配置事件订阅;4)注册Tavily API用于网页搜索;5)下载固件并修改配置文件中的WiFi、API密钥等信息;6)固件烧录步骤;7)最终实现飞书机器人对话功能。文章提供了详细的参数配
本文介绍了如何在飞书平台上部署MimicLaw机器人的完整流程。主要内容包括:1)环境准备,需安装ESP-IDF并支持VSCode编译;2)获取DeepSeek API密钥并充值;3)在飞书开放平台创建机器人应用,配置事件订阅;4)注册Tavily API用于网页搜索;5)下载固件并修改配置文件中的WiFi、API密钥等信息;6)固件烧录步骤;7)最终实现飞书机器人对话功能。文章提供了详细的参数配
摘要:本文记录了STM32H723替换F429时遇到的HardFault问题及解决方案。主要差异包括主频提升、MPU/cache引入和多电源域设计。问题出现在SDRAM初始化阶段,通过调整时钟配置(480MHz主频下FMC工作于120MHz)、FMC-GPIO设置、SDRAM参数配置(适配W9825G6KH芯片)以及关键MPU配置(解除SDRAM地址保护)得以解决。文中引用CSDN相关教程,特别强
摘要:本文介绍了在树莓派5(Debian Bookworm系统)上驱动ST7735 LCD屏幕的详细步骤。首先通过raspi-config启用SPI接口,配置Python虚拟环境并安装luma.lcd库。接着设置用户权限和硬件接线方案,最后提供了测试代码来显示系统信息。作者在最新版Raspberry Pi OS(Debian Trixie)驱动失败后,改用Bookworm版本成功实现了屏幕驱动。测
本文介绍了在树莓派5上驱动ST7735S TFT屏的完整步骤。首先通过raspi-config启用SPI接口,配置Python环境和安装luma.lcd驱动包。接着设置用户权限并详细说明了引脚接线方式。最后提供了一个测试代码示例,该代码通过SPI接口控制屏幕显示文本和矩形框。整个过程涵盖了硬件配置、软件安装、权限设置和程序调试等关键环节,为树莓派5用户使用ST7735S屏幕提供了实用参考方案。